Обзор робота-пылесоса iLife A7 с двумя видами щеток на выбор, удобным пылесборником и управлением со смартфона
Паспортные технические характеристики, комплект поставки и цена
| Кинематическая система | два ведущих колеса и опорный поворотный ролик |
|---|---|
| Способ сбора пыли | инерционное перемещение и вакуумная фильтрация |
| Пылесборник | одно отделение, емкость 0,6 л |
| Основная щетка | одна, c ворсом или валик-скребок |
| Боковые щетки | две |
| Дополнительно | резиновый скребок |
| Режимы очистки | автоматический и змейкой, локальный, вдоль препятствий, ручной, по расписанию (+режим с повышенной мощностью всасывания) |
| Уровень шума | нет данных |
| Датчики препятствий | механический передний/боковой бампер, ИК-датчики приближения и перепада высоты, датчики вывешивания передних колес |
| Датчики ориентации | ИК-датчики поиска базы, гироскоп, датчики вращения опорного ролика и ведущих колес |
| Управление на корпусе | механические кнопки |
| Дистанционное управление | ИК-пульт ДУ |
| Оповещение | ЖК-дисплей, светодиодные индикаторы и звуковые сигналы |
| Время автономной работы | 120-150 минут |
| Время зарядки | менее 300 минут |
| Способ зарядки | на зарядной базе с автоматическим возвратом или напрямую от блока питания |
| Источник питания | литий-ионный аккумулятор, 14,8 В, 2600 мА·ч, 38,5 Вт·ч |
| Масса | 2,6 кг |
| Размеры (диаметр×высота) | ∅330×76 мм |
| Комплект поставки |
|
| Ссылка на сайт производителя | iLife A7 |
| Ссылка на официальный магазин на AliExpress.com | iLife A7 |
Внешний вид и функционирование

Робот-пылесос упакован в две коробки — внешнюю защитную из толстого гофрокартона и внутреннюю из картона потоньше и уже с ручкой.
При необходимости ручку от внешней коробки можно втащить наружу, чуть надрезав внешнюю коробку.

На плоскостях коробки изображен сам робот-пылесос, перечислены главные особенности, указана комплектация, приведены основные характеристики. Большинство надписей на английском языке, но часть из них продублирована на нескольких языках, включая русский. Для защиты и распределения содержимого коробки используются формы из папье-маше и полиэтиленовые пакеты, а мелкие комплектующие упакованы в футляр из прозрачного пластика. В комплект поставки входят все необходимые для работы аксессуары, включая пару элементов питания типа AAA для пульта.

Запасные части и расходные материалы в комплекте поставки представлены щеткой с ворсом (валик-скребок установлен), сменным складчатым фильтром последней ступени и набором (правая и левая) боковых щеток. Есть и комбинированная щетка-гребенка, которую можно использовать для чистки пылесборника, самого робота и основной щетки в частности.
Краткое и подробное руководства на английском языке. Впрочем, при продаже в России с большой вероятностью будет и версия руководства на русском языке. Качество текста хорошее, как и качество полиграфического исполнения.
Корпус робота изготовлен в основном из черного пластика с матовой поверхностью. Верхняя панель изготовлена из прозрачного слегка тонированного серым пластика. Покрытие панели многослойное: за непрозрачным черно-серебристым слоем, отсутствующим над дисплеем, идет прозрачный относительно устойчивый к повреждениям.

Кнопки на верхней панели изготовлены из полупрозрачного пластика. Они имеют сначала серебристое покрытие (участки, где оно отсутствует формируют обозначения кнопок), а сверху — стойкое прозрачное покрытие. Значок на большой круглой кнопке запуска может подсвечиваться зеленым или оранжевым в зависимости от состояния робота. Яркость индикатора на этой кнопке невысокая, в освещенном помещении из-за отблесков на серебристой поверхности сложно рассмотреть, что именно он показывает.

Перед кнопками находится сегментный инвертированный ЖК-дисплей с белым свечением. Дополнительно о своем состоянии робот информирует с помощью коротких и не очень громких звуковых сигналов. Отключить звуковое оповещение нельзя.
Пылесос имеет почти идеально круглую форму диаметром 327-328 мм (здесь и далее по тексту приведены результаты наших измерений). Края сзади снизу скошены, что помогает роботу преодолевать препятствия, а выраженная угловатость при переходе от верхней панели к боковой поверхности и бампера снижают вероятность того, что пылесос будет застревать под препятствиями с небольшим просветом или пытаться забраться на слишком высокие препятствия.

Масса робота равна 2,55 кг.
На днище расположены две контактные площадки, передний опорный поворотный ролик, боковые щеточки, крышка батарейного отсека, два ведущих колеса, отсек основной щетки. Ближе к краю сразу за бампером находятся три ИК-датчика перепада высоты, благодаря которым робот-пылесос может избежать падения со ступенек.

Передний ролик изготовлен из черного упругого пластика чередующегося с белым и жестким. Сделано это не просто так, а для того, чтобы робот с помощью оптического датчика, расположенного под роликом, мог определять, перемещается ли он во время уборки или нет. Сверху ролик прикрывает щиток из прозрачного пластика, что снижает скорость загрязнения датчика и поворотного узла.
Оси ведущих колес расположены на одном диаметре окружности корпуса, это позволяет роботу совершать разворот на месте без изменения границ, занимаемой им площади. Положительную роль играют относительно небольшая высота, равная 79 мм, и гладкий по периметру корпус. Ведущие колеса диаметром 70 мм оснащены резиновыми покрышками с неглубокими грунтозацепами. Колеса установлены на подпружиненных шарнирах, имеющих ход в 26 мм, что также улучшает способность робота преодолевать препятствия. Всю переднюю половину корпуса огибает подпружиненный бампер с небольшим ходом.

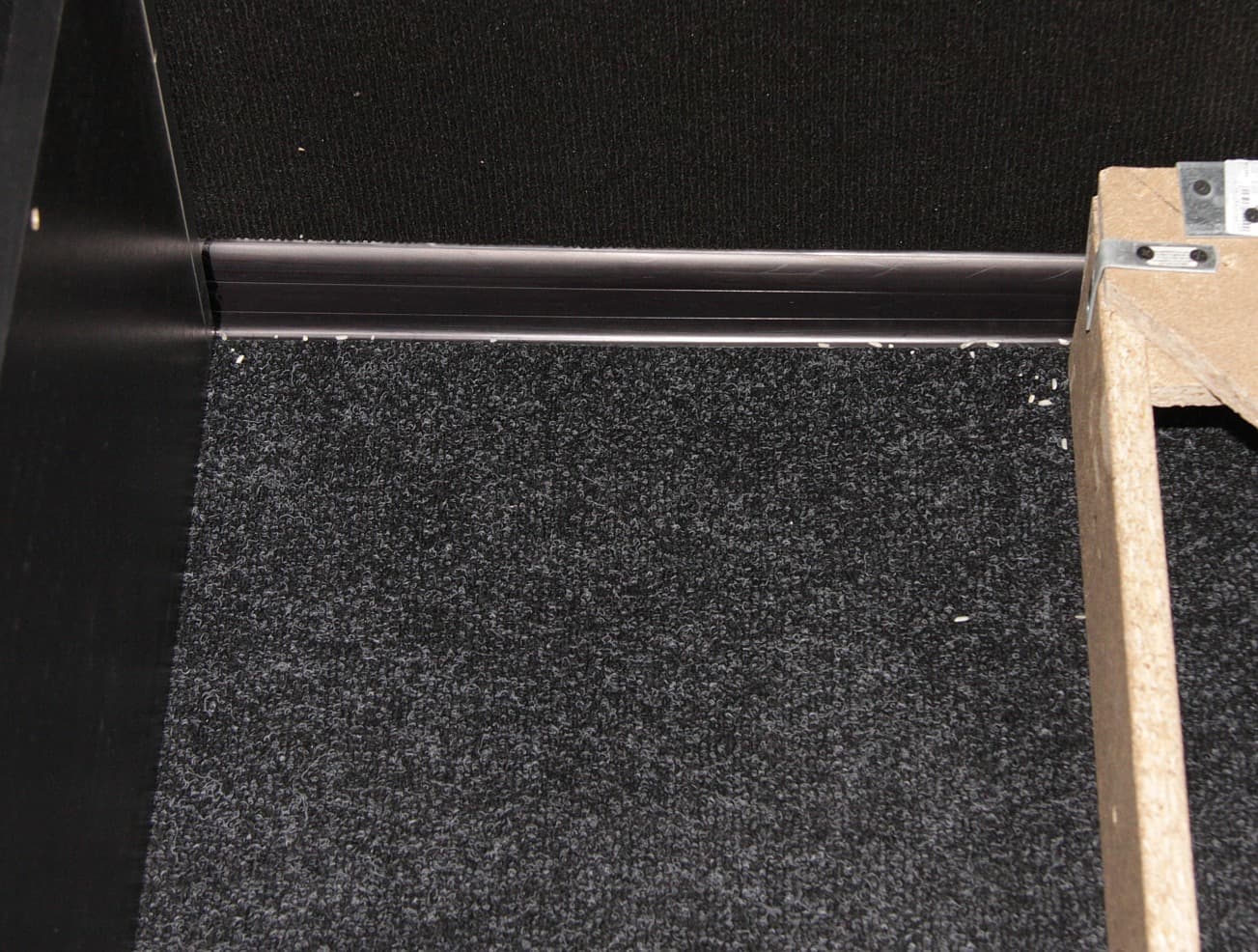
Сдвиг бампера вызывает срабатывание механических датчиков препятствий. Расстояние от пола до нижней точки бампера равно 15 мм, значит, потенциально на ступеньку такой высоты робот сможет заехать. Бампер оснащен также датчиками, определяющими нажатие сверху. Видимо, это позволяет роботу вовремя определять, что он забрался под что-то низкое, чтобы сдать назад и не застрять. Для защиты мебели спереди на бампер в нижней его части наклеена полоса из резины средней жесткости. Выше на бампере за окошком из тонированного пластика находятся ИК-датчики обнаружения препятствий, базовой станции и, возможно, приемник команд с пульта ДУ. Какие-то датчики, по всей видимости, также находятся за тонированными вставками на корпусе за бампером ближе к задней части пылесоса.
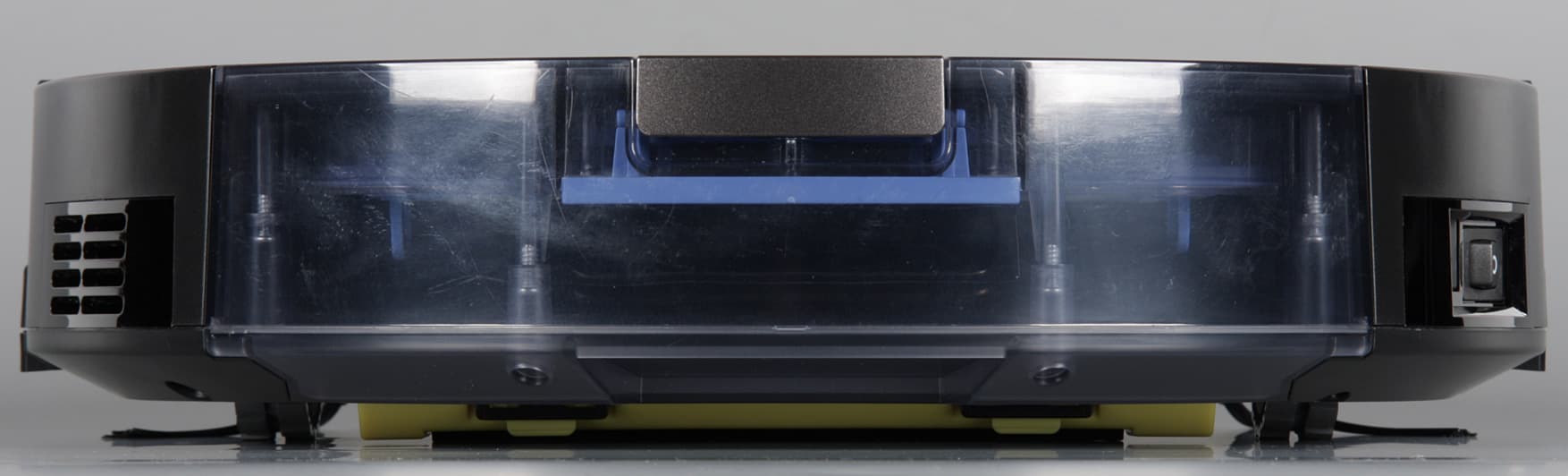
Нажав на фиксатор сзади, можно отсоединить пылесборник от корпуса робота.

Корпус пылесборника выполнен из слегка тонированного прозрачного пластика, поэтому степень его заполнения можно оценить, рассмотрев содержимое через заднюю стенку. Специальная шторка из прозрачного пластика предотвращает выпадение мусора через отверстие для входа воздуха. Верхняя часть пылесборника откидывается на большой угол, что позволяет без труда вытряхнуть скопившийся мусор или почистить пылесборник обычным пылесосом с щелевой насадкой.
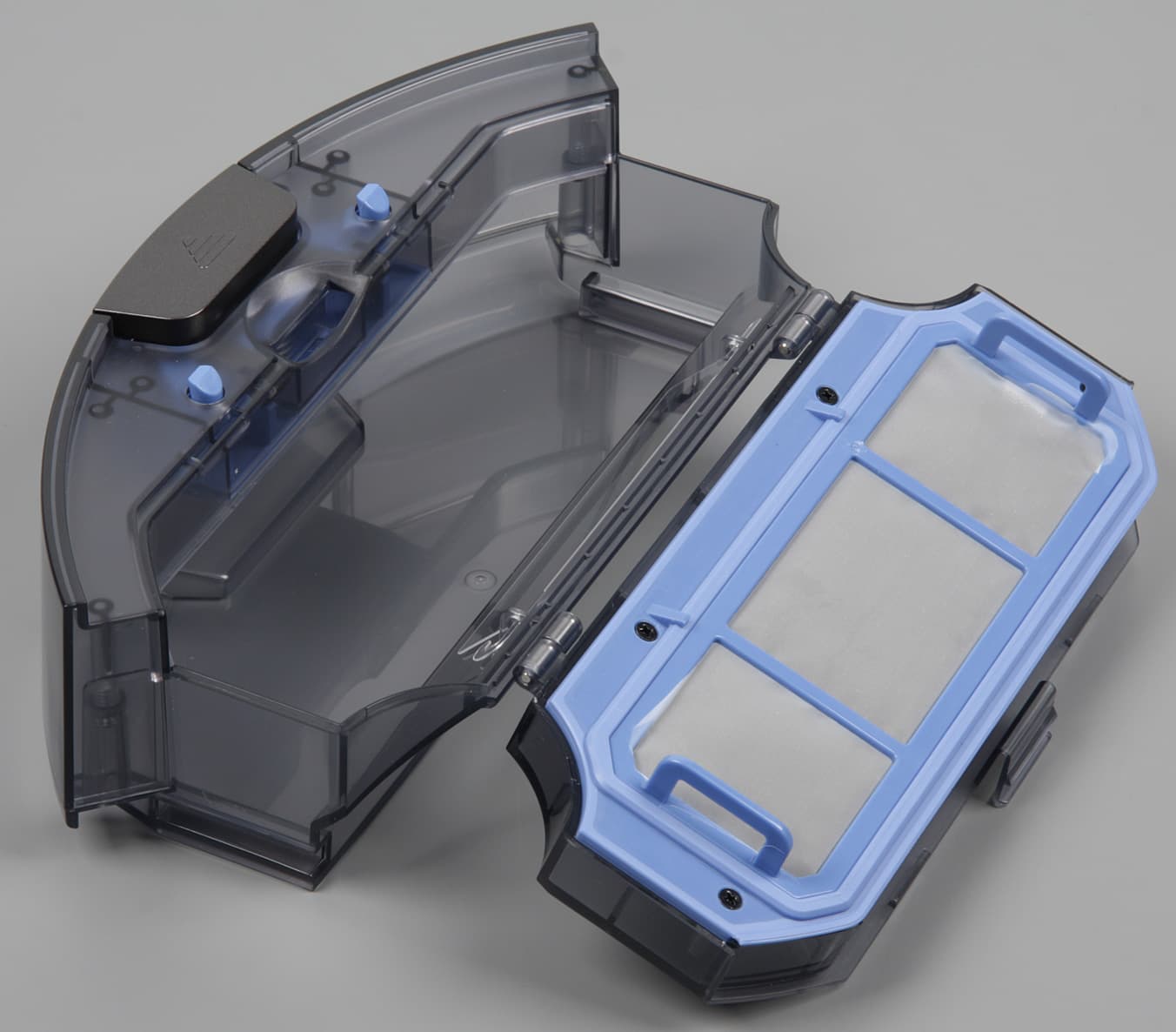
Для полной очистки нужно вынуть предварительный сетчатый фильтр, стряхнуть с него легкий мусор, и при необходимости почистить поролоновый фильтр и складчатый фильтр тонкой очистки.

С нашей точки зрения такая многоступенчатая система фильтрации избыточна и только снижает воздушный поток, хватило бы и одного фильтра-сеточки. В любом случае, поролоновый уж точно лишний. Впрочем, в ходе тестов на первом фильтре собиралось много легкого мусора (и это с чистого пола), то есть мощность всасывания даже со всеми фильтрами относительно высокая. Отметим, что вентилятора в самом пылесборнике нет, поэтому пылесборник и два фильтра (кроме складчатого) можно мыть под водой, главное потом все хорошо высушить.
Боковые щеточки имеют длинную и относительно жесткую пластиковую щетину, пучки которой выходят из упругих поводков. Как показала практика, эта щетина хорошо сохраняет форму. Правая и левая щеточки отличаются поворотом поводков, а чтобы пользователь знал, какую куда устанавливать, на щеточках и на днище выдавлены буквы L и R, а цвет центральной вставки на щеточке соответствует цвету оси привода. К осям приводов щеточки крепятся с помощью пружинного фиксатора, что очень удобно.

Основная щетка представляет собой цилиндр из резины с лопастями-скребками. Основное преимущество такой безворсовой щетки перед традиционной со щетиной заключается в том, что на эту резиновую не так быстро наматываются волосы, шерсть, волокна и т. д., а все намотавшееся легко снимается при очистке.
Вал альтернативной основной щетки гладкий, относительно большого диаметра и с продольными канавками — это облегчает освобождение вала просто пальцами без помощи инструментов от ниток, волос и прочего намотавшегося. Щетина на этой щетке имеет среднюю жесткость, а ее пучки идут волнами, что уменьшает звук от вращения щетки в контакте с полом.

На торцы оси обоих щеток плотно насажены заглушки из черного пластика. Из центра одной выходит стальная ось, которая, вращается в шариковом подшипнике, запрессованном в торец оси щетки. На эту ось надевается втулка из резины, которая по замыслу разработчиков должна снижать шум и вибрации.

Щетка в отсеке фиксируется рамкой из желтого пластика. На этой рамке есть резиновый скребок, который помогает щетке подхватывать мусор с пола и забрасывать его в пылесборник. Блок с основной щеткой может с ходом порядка 7 мм перемещаться вверх-вниз, следуя рельефу пола. Для сохранения герметичности блок щетки соединяется с корпусом робота через короткий резиновый рукав. Все это, по идее, должно способствовать повышению качества уборки.
Отметим, что редукторы приводов щеток и колес позволяют их проворачивать рукой, это очень помогает, когда нужно вытащить робота, например, из-под дивана, под которым он застрял, или распутать что-то намотавшееся на колеса или щеточки.
При уборке передние боковые щеточки подгребают мусор к центру, затем частички мусора закидываются основной щеткой в пылесборник, а поток воздуха помогает засасывать в пылесборник самый легкий мусор. Упругие прокладки на всем пути от входного отверстия пылесборника до вентилятора исключают паразитный подсос воздуха мимо фильтров и пылесборника.
На правом боку находится разъем питания для прямой зарядки аккумулятора и клавиша, отключающая батарею от основных цепей робота.

В данном роботе установлена литий-ионная аккумуляторная батарея. Батарейный блок составлен из четырех цилиндрических элементов популярного типоразмера 18650.

База, на которой пылесос заряжается, имеет большое основание, на которое снизу наклеены четыре противоскользящие резиновые ножки-накладки.

Питается база от внешнего адаптера питания, который также можно использовать для зарядки робота, минуя базу, если по какой-то причине она недоступна. Кабель можно уложить в каналы на днище базы и вывести на правую или на левую сторону. Длина кабеля от адаптера равна 1,5 м.

К пылесосу прилагается небольшой ИК-пульт дистанционного управления.

Кнопки пульта изготовлены из упругого резиноподобного материала, обозначения на кнопках достаточно крупные и контрастные.
Данный робот-пылесос имеет пять режимов уборки:
В автоматическом режиме робот последовательно убирает участок за участком, пока не уберет всю доступную ему площадь или до разряда аккумулятора. В пределах участка робот движется по прямой от препятствия к препятствию, хаотично меняя направление после столкновения, и какое-то время следует вдоль стен. Эти варианты перебираются по циклу. Включается данный режим нажатием на кнопку запуска на пульте или на самом роботе. Также этот режим используется во время уборки по расписанию. Завершив уборку, робот возвращается на базу для зарядки аккумулятора.
Уборка змейкой — похож на предыдущий, но робот преимущественно проходит площадь участков змейкой. Включается этот режим нажатием на кнопку с изображением соответствующей траектории на пульте или на самом роботе.
В ручном режиме уборки направление движения робота задается с помощью кнопок пульта дистанционного управления. Робот поворачивает на месте при нажатии на стрелки вправо-влево на пульте и движется вперед, убирая, пока нажата стрелка вверх.
Для локальной очистки места на полу нужно перенести туда робота или направить его в нужное место в режиме ручного управления, а затем нажать на кнопку со значком спирали на пульте или на самом роботе. Робот начнет уборку по разворачивающейся и потом сворачивающейся спирали в круге диаметром примерно в один метр. В этом режиме вентилятор робота работает на высокой мощности.
Еще одним вариантом уборки является движение только вдоль стен и препятствий. Включает этот режим кнопка на пульте со значком прямоугольника и стрелками.
Во время уборки в любом из режимов, кроме локальной очистки, нажатие на кнопку со значком вентилятора на ДУ повышает мощность всасывающего вентилятора робота (повторное нажатие на эту кнопку снижает мощность до нормальной). Выбранный режим сохраняется и при последующих запусках робота.
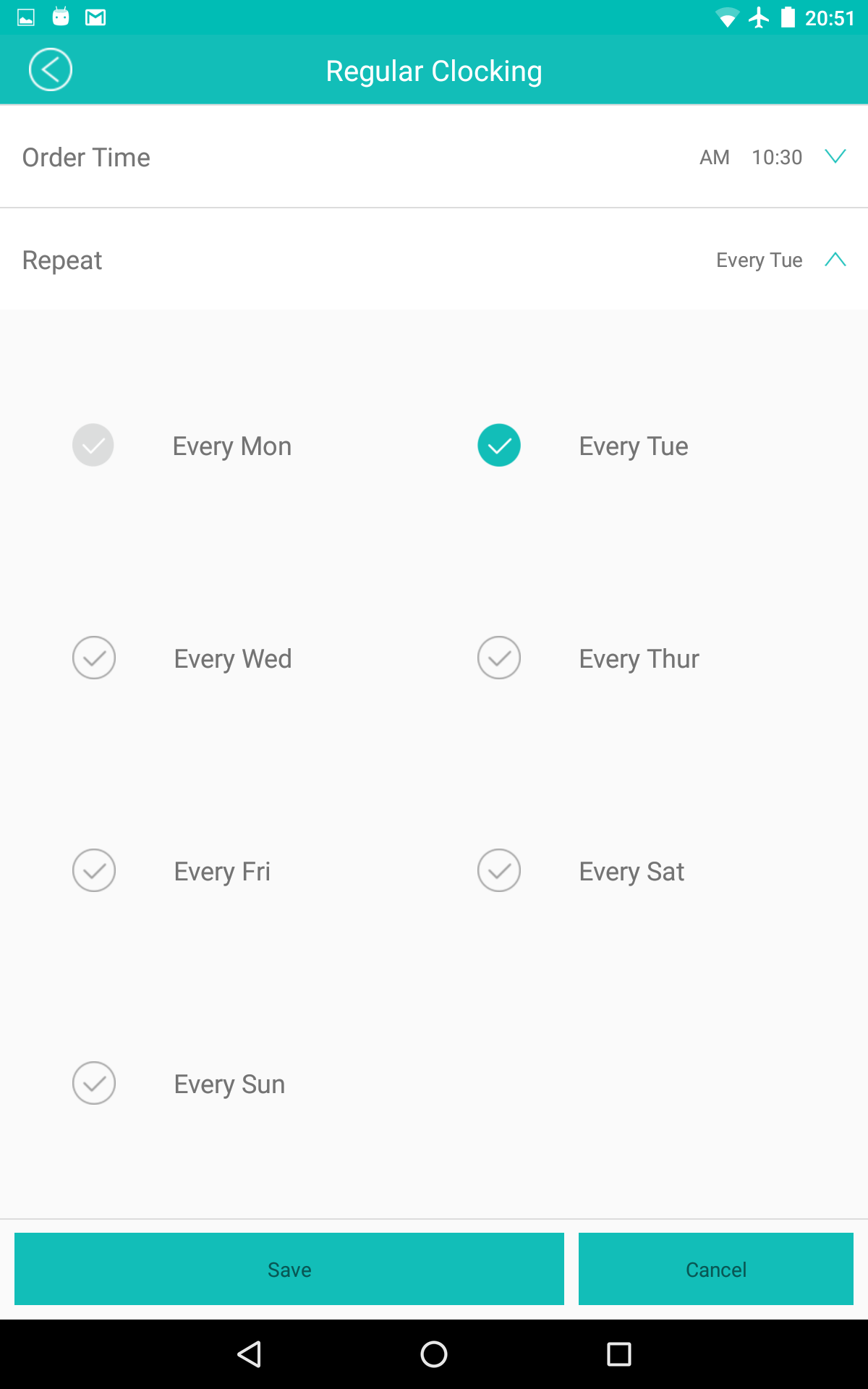
Есть возможность назначить запуск (или не запуск) уборки в автоматическом режиме в выбранные дни недели на определенное время, устанавливаемое свое для каждого дня.
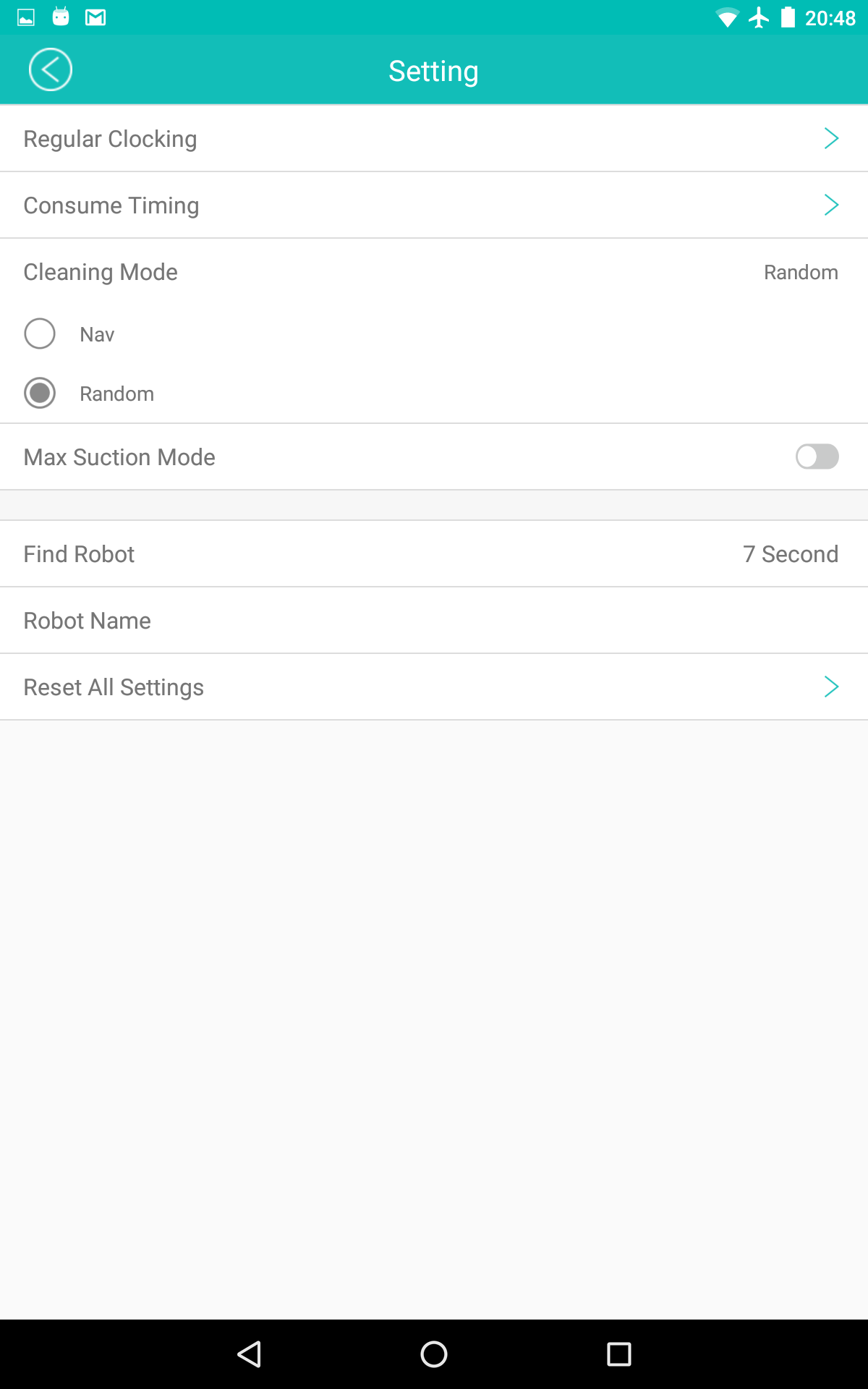
Фирменное приложение, устанавливаемое на мобильные устройства с Android (видимо, и iOS) на борту, несколько расширяет функциональность робота.
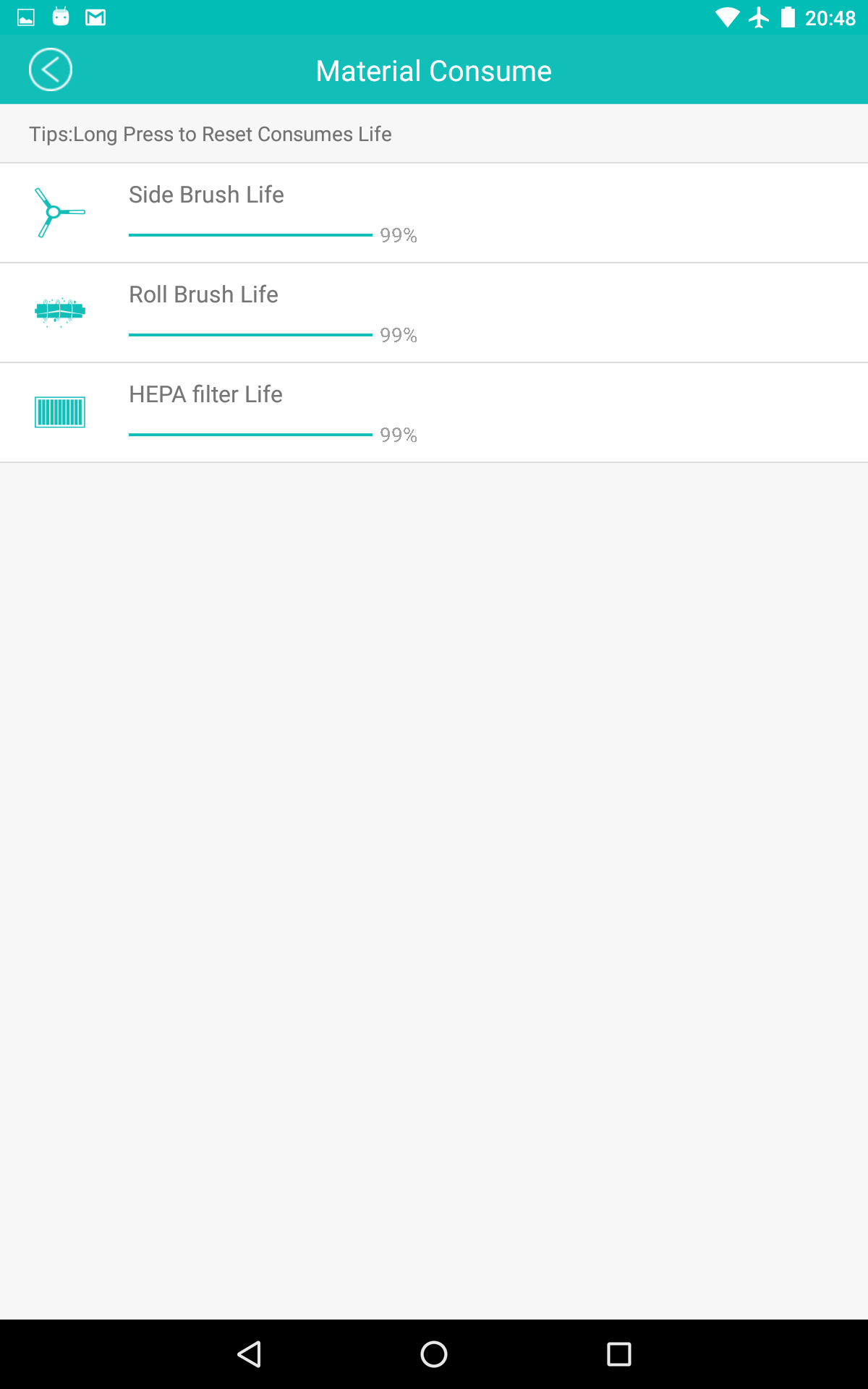
Приложение пока не русифицировано, но, возможно, будет. Хорошо, что по умолчанию для интерфейса выбирается английский язык. Запустив приложение первый раз, нужно установить связь с роботом, который должен быть в радиусе действия Wi-Fi-сети (и, видимо, только 2,4 ГГц). Для управления роботом, возможно, используется глобальный облачный сервис, по крайней мере, нам удалось запустить робота, находясь в области действия другой сети Wi-Fi. В приложении удобно задавать расписание уборки, можно менять режим, управлять мощностью вентилятора, отслеживать ресурс щеток и фильтра, а функция Find Robot, поможет найти робота — он подаст звуковые сигналы. Также приложение можно использовать в качестве пульта ДУ.

Тестирование
Ниже представлены результаты тестирования по нашей методике, подробно описанной в отдельной статье. Сначала в автоматическом режиме с нормальной мощностью вентилятора и с валиком-скребком в качестве основной щетки (последовательные запуски на уборку):
| Время уборки, ММ:СС | % (суммарный) |
|---|---|
| 6:04 | 77,5 |
| 6:34 | 92,6 |
| 5:34 | 95,5 |
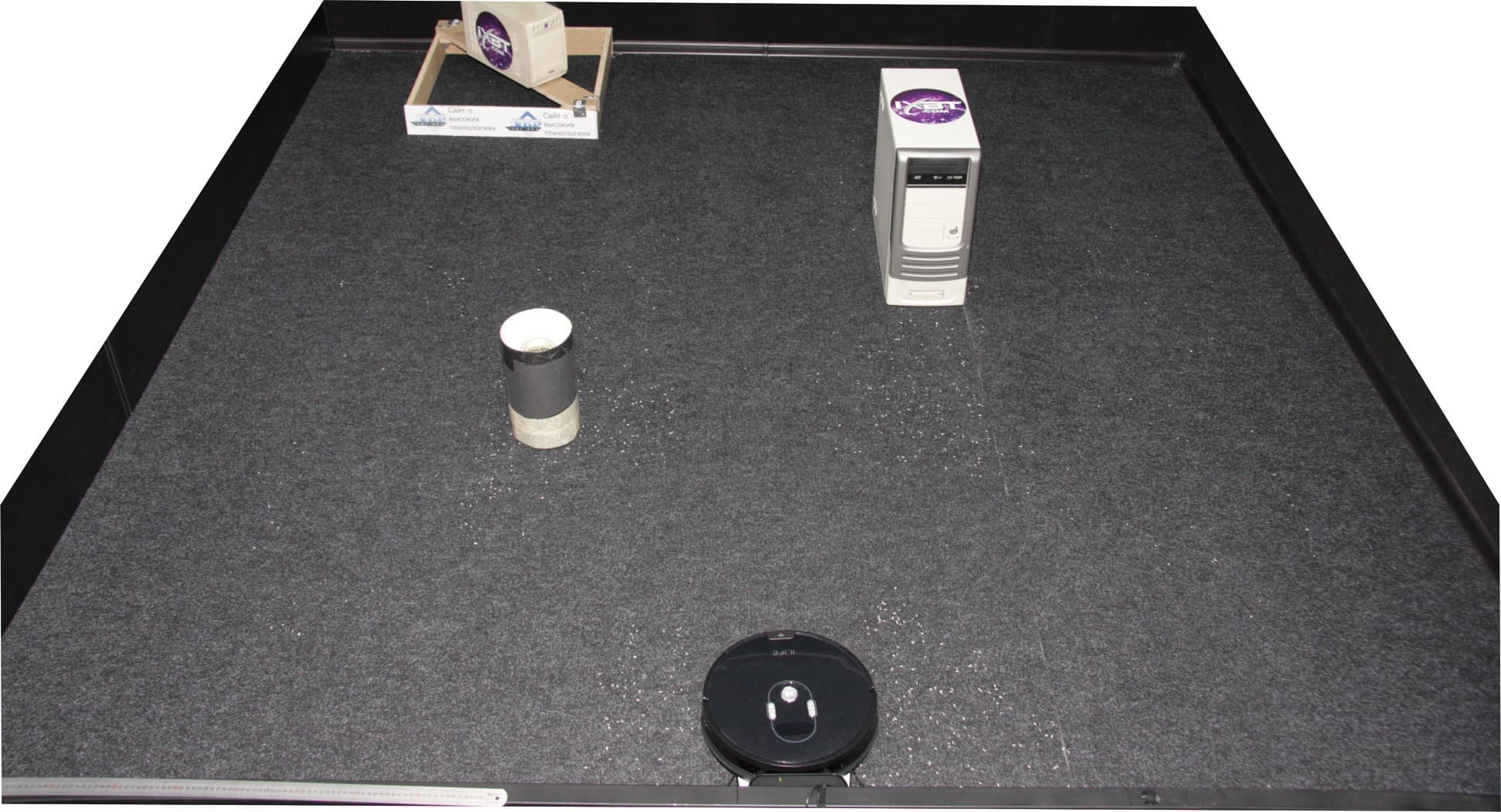
Предыдущие тесты показали, что, как замена щетки на ворсяную, так и увеличение мощности вентилятора не приводят к значимому изменению качества уборки нашего тестового мусора, поэтому все количественные тесты мы проводили с нормальной мощностью и с установленным валиком-скребком. Видео ниже снято с одной точки с почти полным охватом убираемой территории, база находится внизу по центру, при обработке часть видеоряда ускорена в десять раз:
Робот убирает быстро, но качество уборки невысокое, после первого раза робот оставляет много неубранных мест:

Но после третьего запуска на уборку мусора на большей части площади остается мало:

В загончике достаточно чисто:
В углах чуть-чуть:
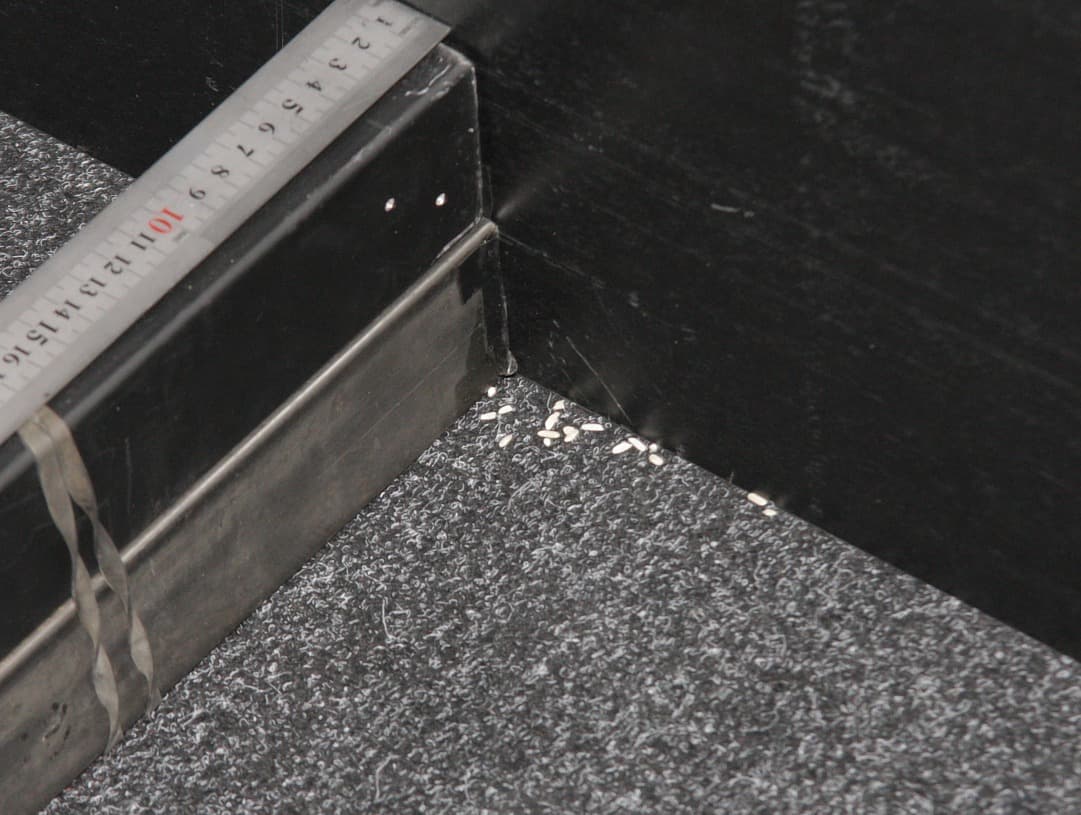
Вот около базы мусора немного, но в пылу борьбы за чистоту робот толкнул базу, сместил ее, но в результате все же припарковался:

Между высокими вертикальными и хорошо отражающими ИК-лучи стенками и корпусом робота обычно остается небольшой зазор, тогда как к низким, наклонным (например, к плинтусу) или черным в ИК-свете стенкам робот подъезжает вплоть до срабатывания механического датчика в бампере. Загон шире робота всего на 5 см, но это не мешает роботу туда заезжать и хорошо там убирать.
Теперь уборка змейкой (последовательные запуски на уборку):
| Время уборки, ММ:СС | % (суммарный) |
|---|---|
| 18:20 | 87,7 |
| 19:52 | 95,6 |
| 25:03 | 97,2 |
В режиме уборки змейкой в движении робота наблюдается определенная схема. Робот сначала обходит участок площади по периметру, не обязательно замыкая его, проходит площадь внутри участка змейкой и еще раз обходит участок по периметру. Затем принимается за следующий участок. Робот не обязательно выполняет однократную уборку доступной ему площади, по крайней мере, на небольшой площади он может пройтись по участкам два или более раз. Робот явно пытается отслеживать свое перемещение в пространстве, а также строить и использовать карту убираемой поверхности. В этом ему помогают датчики вращения колес и переднего ролика, а также гироскоп. Впрочем, пропущенные участки и некоторая хаотичность в движении, показывают, что навигация в данном случае неполноценная. Видео ниже снято с одной точки с почти полным охватом убираемой территории, база находится внизу по центру, при обработке часть видеоряда ускорена в десять раз:
Вот, как выглядит доступная роботу площадь после первого цикла уборки змейкой:
Качество уборки змейкой выше, чем в автоматическом режиме, но и уборка длится дольше. Да, и напомним, что при запуске по расписанию используется именно автоматический режим.
Дополнительно были проведены натурные испытания. Для этого в офисном и относительно чистом помещении был выгорожен участок из нескольких комнат общей площадью примерно 64 м². В коридоре (23 м²) только шкаф в торце, в других помещениях заполнение мебелью среднее, людей нет. Схема помещения приведена ниже. На ней цветными прямоугольниками отмечены доступные роботу комнаты. База робота установлена на схеме внизу справа.
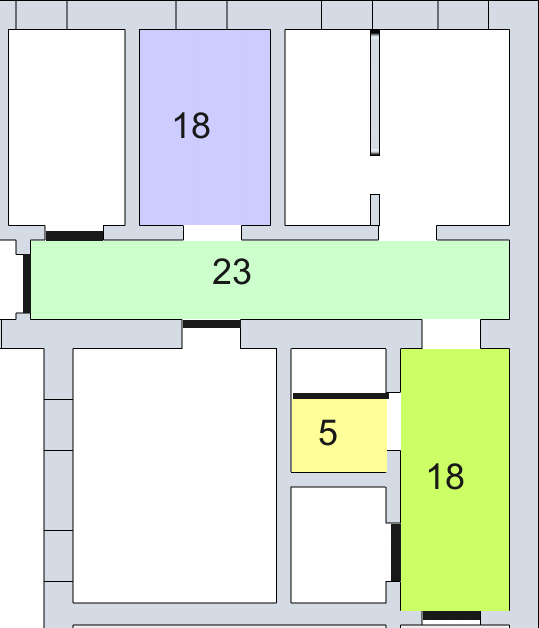
Запуск робота был произведен по расписанию, что означает режим автоматической уборки, предварительно была выбрана высокая мощность вентилятора. Робот убирал доступную ему площадь до разряда аккумулятора в течение 1 ч 19 минут и через 4 мин 30 с вернулся на базу. Стоит отметить, что, несмотря на препятствия в виде невысоких порожков и ножек многочисленных стульев, робот заезжал, куда мог протиснуться и нигде не застревал. Согласно субъективной оценке (за роботом было постоянное наблюдение) робот убрал везде, разделив всю площадь на участки, какие-то участки он убирал по два-три раза. Возвращался робот на базу, неторопливо двигаясь по стеночке, он явно точно не знал, где находится база. Однако, нет сомнений, что какая-то способность робота к навигации способствует повышению качества и скорости уборки.
В режиме локальной уборки робот убирает по разворачивающейся и потом сворачивающейся спирали. Видео ниже это демонстрирует:
В режиме с нормальной мощностью вентилятора робот может убирать без подзарядки примерно 2 часа 20 минут. На восстановление заряда роботу требуется провести на базе 4 ч 20 мин. График потребления от сети при прямой зарядке от адаптера:
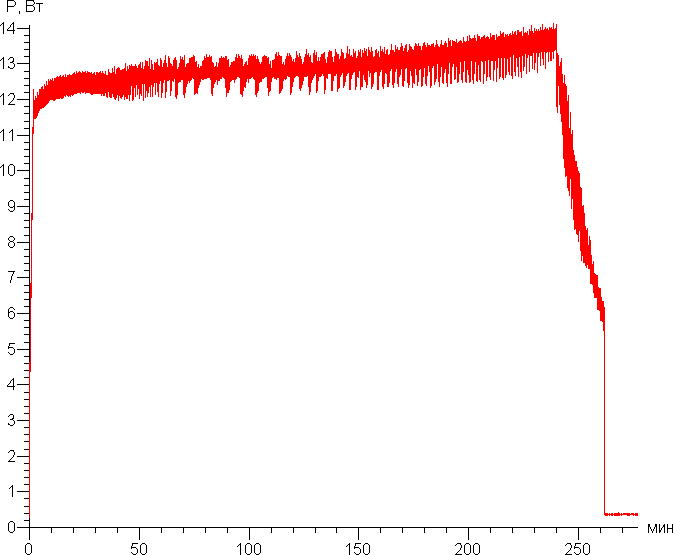
Во время зарядки напрямую от адаптера питания от сети потребляется до 14 Вт. 0,3 Вт потребляется роботом после окончания зарядки и 0,6 Вт потребляет база без робота.
Уровень шума увеличивается при включении вентилятора на максимальную мощность.
| Мощность вентилятора | Уровень шума, дБА |
|---|---|
| Нормальная | 54,6 |
| Максимальная | 62,5 |
Робот относительно громкий. Находиться в одной комнате с работающим роботом не очень комфортно, особенно при его работе на высокой мощности. Однако характер издаваемого им шума не является очень неприятным. Для сравнения, уровень шума в этих условиях обычного (не самого тихого) пылесоса равен примерно 76,5 дБА.
Выводы
В автоматическом режиме или в режиме уборки змейкой iLife A7 последовательно участок за участком убирает доступную ему площадь помещения и возвращается на базу для зарядки аккумулятора. Качество уборки в режиме уборки змейкой высокое, но этот режим не используется при запуске по расписанию. При необходимости пользователь может увеличить мощность вентилятора, что улучшит эффективность уборки легкого мусора, но и сократит время работы. Также можно вручную управлять движением робота, включать режимы интенсивной очистки локального участка и очистки вдоль стен. Робот комплектуется безворсовой резиновой щеткой, на которую в меньшей степени наматываются волосы, шерсть, нитки и пр., это особенно оценят владельцы домашних животных.
Достоинства
- Ограниченная способность к навигации
- Безворсовая основная щетка
- Удобное крепление боковых щеточек
- Удобный пылесборник
- Есть режим с повышенной мощностью всасывания
- Управление с помощью мобильного приложения
- Уборка по расписанию
- Невысокий корпус
- Хорошая комплектация
Недостатки
- Во время уборки может сдвинуть базу
- Высокий уровень шума в режиме максимальной мощности вентилятора
Комментарии