Паспортные технические характеристики, комплект поставки и цена
| Кинематическая система | два ведущих колеса и опорный поворотный ролик, вспомогательный фиксированный ролик на пылесборнике |
|---|---|
| Способ сбора пыли | инерционное перемещение и вакуумная фильтрация |
| Пылесборник | одно отделение, емкость 0,45 л |
| Основная щетка | одна, валик-скребок |
| Боковые щетки | две |
| Дополнительно | резиновый скребок |
| Режимы очистки | автоматический и классический (+режим с повышенной мощностью всасывания), локальный, ручной, по расписанию, влажная протирка пола (емкость для воды 0,3 л) |
| Уровень шума | 54 дБ |
| Датчики препятствий | механический передний/боковой бампер, ИК-датчики приближения и перепада высоты |
| Датчики ориентации | ИК-датчики поиска базы, гироскоп, датчики вращения опорного ролика и ведущих колес |
| Управление на корпусе | механические кнопки |
| Дистанционное управление | ИК-пульт ДУ |
| Оповещение | светодиодные индикаторы и звуковые сигналы |
| Время автономной работы | 90-120 мин |
| Время зарядки | 180—240 мин |
| Способ зарядки | на зарядной базе с автоматическим возвратом или напрямую от блока питания |
| Источник питания | литий-ионный аккумулятор, 14,8 В, 2600 мА·ч, 38,5 Вт·ч |
| Масса | 2,5 кг |
| Размеры (диаметр×высота) | ∅310×77 мм |
| Комплект поставки |
|
| Ссылка на сайт производителя | iBoto Smart X610G Aqua |
| Средняя цена | |
| Розничные предложения |
Внешний вид и функционирование

Робот-пылесос упакован в две коробки — внешнюю защитную из толстого гофрокартона, и внутреннюю из картона потоньше и уже с ручкой.

При необходимости ручку от внешней коробки можно втащить наружу, чуть надрезав внешнюю коробку.

В комплект поставки входят почти все необходимые для работы аксессуары, почти, так как пару элементов питания типа AAA для пульта пользователю придется покупать отдельно.

Запасные части и расходные материалы в комплекте поставки представлены сменным складчатым фильтром последней ступени, парой салфеток из микроволокна и набором (правая и левая) боковых щеток. Есть и комбинированная щетка-гребенка, которую можно использовать для чистки пылесборника, самого робота и основной щетки в частности.
Руководство пользователя представляет собой брошюру на русском языке из нескольких страниц. Качество текста и полиграфического исполнения достаточно высокое.
Корпус робота изготовлен в основном из белого пластика без покрытия и с матовой поверхностью. Светлый цвет корпуса облегчает поиск робота в темных закоулках квартиры, когда он по какой-то причине не вернется на базу, также робота проще заметить боковым зрением, когда он путается под ногами, а значит, с меньшей вероятностью на него можно наступить. Днище, правда, быстро пачкается, и снизу робот выглядит уже неаккуратно. Верхняя панель прикрыта пластиной из минерального закаленного стекла, поэтому она не царапается и легко очищается, однако из-за темной подложки панель маркая, она быстро покрывается следами от пальцев. На верхней панели ближе к передней части есть две механические кнопки: одна с подсвечивающимися словом Auto и значком питания, вторая — с подсвечивающимися значком из двух перекрещенных стрелок.

В зависимости от текущего состояния индикатор на кнопке Auto светится или мигает зеленым, оранжевым или красным. На кнопке со стрелками индикатор только светится или мигает зеленым. Яркость индикаторов невысокая, в освещенном помещении из-за отблесков на серебристой поверхности кнопок сложно рассмотреть, что именно показывают индикаторы. Дополнительно о своем состоянии робот информирует с помощью коротких и не очень громких звуковых сигналов. Отключить звуковое оповещение нельзя.
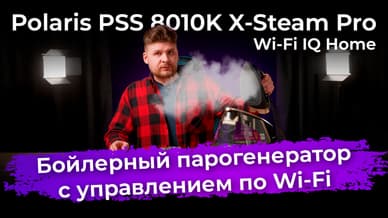
Пылесос имеет почти идеально круглую форму диаметром 315 мм (здесь и далее по тексту приведены результаты наших измерений). Края снизу скошены, что помогает роботу преодолевать препятствия, а бортик на бампере сверху снижает вероятность того, что пылесос будет застревать под препятствиями с небольшим просветом.
Масса робота равна 2,55 кг.
На днище расположены две контактные площадки, передний опорный поворотный ролик, боковые щеточки, крышка батарейного отсека, два ведущих колеса, отсек основной щетки. Ближе к краю сразу за бампером расположены три ИК-датчика перепада высоты, благодаря которым робот-пылесос может избежать падения со ступенек.

Передний ролик изготовлен из черного упругого пластика чередующегося с белым и жестким. Сделано это не просто так, а для того, чтобы робот с помощью оптического датчика, расположенного под роликом, мог определять, перемещается ли он во время уборки или нет.
Оси ведущих колес расположены на одном диаметре окружности корпуса, это позволяет роботу совершать разворот на месте без изменения границ, занимаемой им площади. Положительную роль играют относительно небольшая высота, равная 73 мм, и гладкий по периметру корпус. Ведущие колеса диаметром 65 мм оснащены резиновыми покрышками с неглубокими грунтозацепами. Колеса установлены на подпружиненных шарнирах, имеющих ход в 27 мм, что также улучшает способность робота преодолевать препятствия. Всю переднюю половину корпуса огибает подпружиненный бампер с небольшим ходом. Бампер изготовлен из белого пластика и снаружи имеет зеркально-гладкую не устойчивую к повреждениям поверхность.

Сдвиг бампера вызывает срабатывание механических датчиков препятствий. Расстояние от пола до нижней точки бампера равно 15 мм, значит, на ступеньку такой высоты робот потенциально может заехать. Для защиты мебели спереди на бампер в нижней его части наклеена полоса из резины средней жесткости. Выше на бампере за окошком из тонированного пластика находятся ИК-датчики обнаружения препятствий, базовой станции и, возможно, приемник команд с пульта ДУ. Какие-то датчики, по всей видимости, также находятся за тонированными вставками на корпусе за бампером ближе к задней части пылесоса.

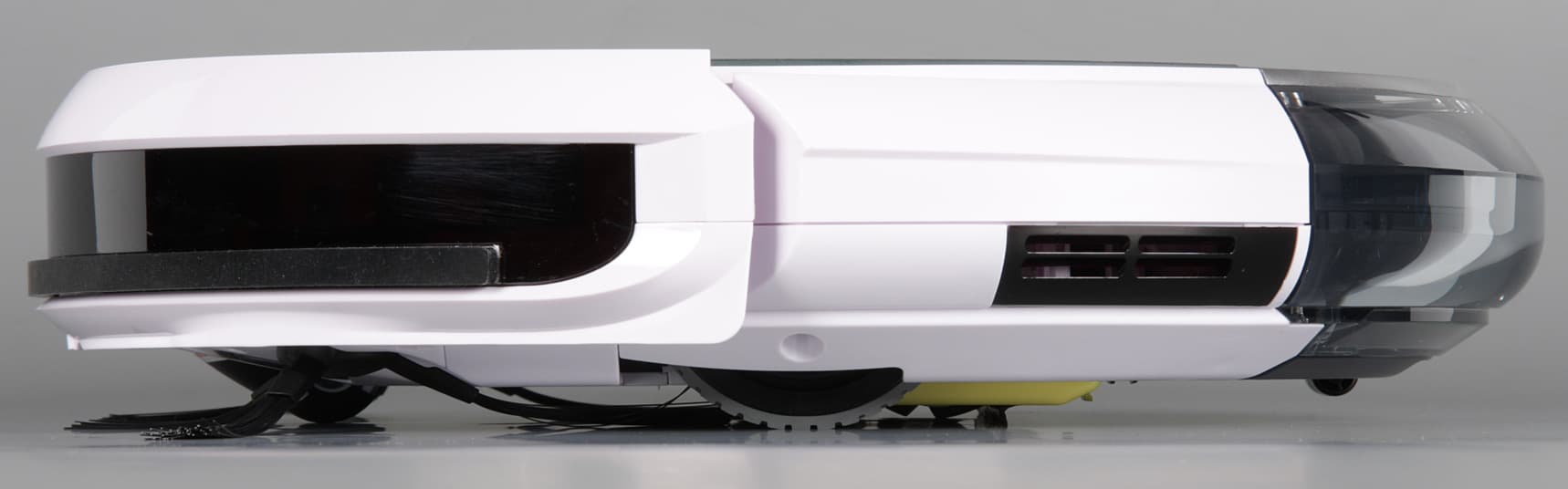
Нажав на фиксатор сзади, можно отсоединить пылесборник от корпуса робота.

Корпус пылесборника выполнен из слегка тонированного прозрачного пластика, но особой пользы это не приносит, так как взглянуть на него можно только или перевернув пылесос днищем вверх или вынув пылесборник. Передняя часть пылесборника откидывается на большой угол, что позволяет без труда вытряхнуть скопившийся мусор. Однако отсек для мусора относительно узкий и его будет неудобно чистить с помощью обычного пылесоса с щелевой насадкой, также передняя перегородка на откидывающейся части невысокая, поэтому мусор легко просыпается из закрытого пылесборника. Именно высота этой перегородки ограничивает полезную емкость пылесборника по отношению к тяжелому мусору.
В закрытом положении передняя крышка удерживается магнитными фиксаторами.
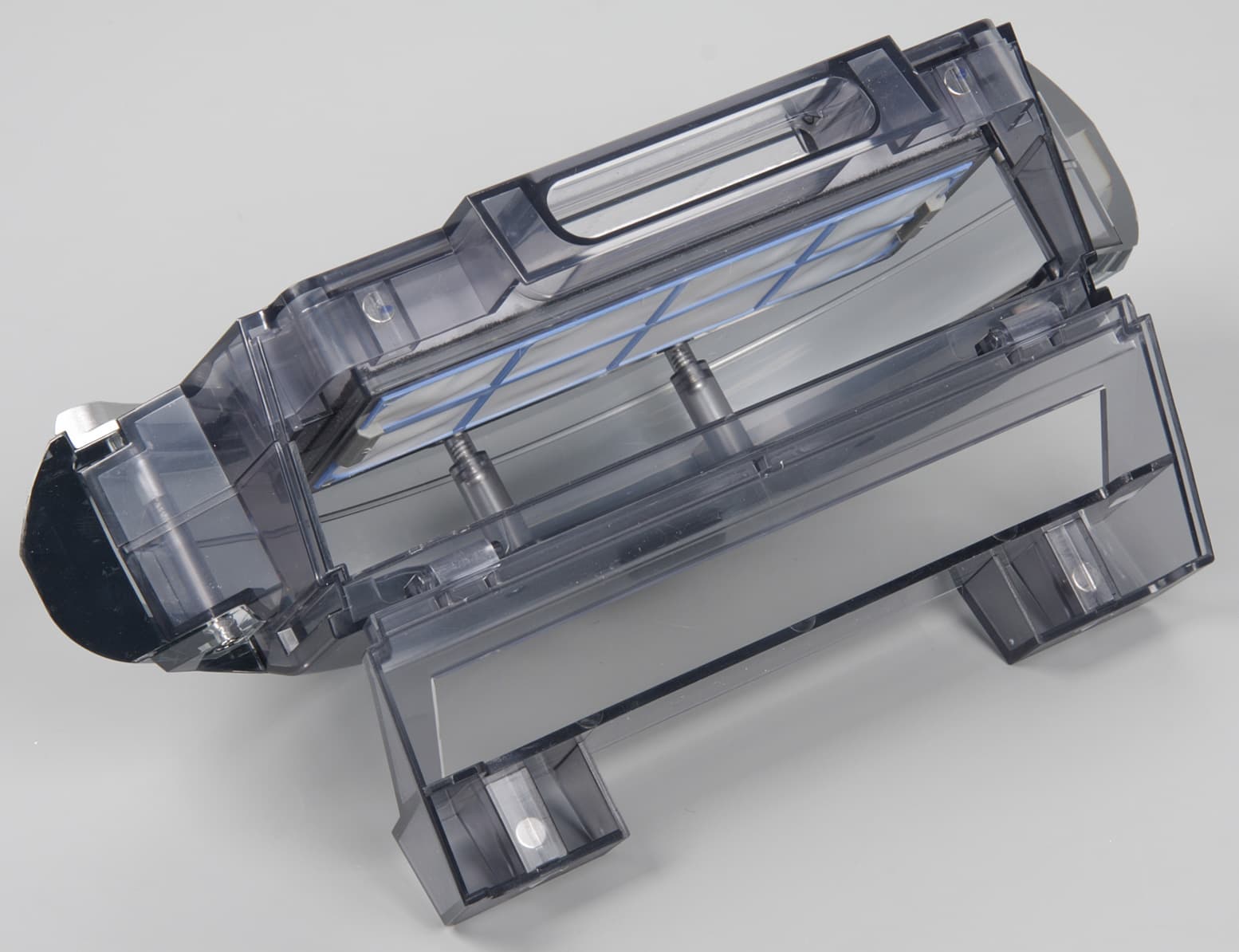
Для полной очистки нужно открыть верхнюю крышку пылесборника и вынуть сначала складчатый фильтр тонкой очистки, потом поролоновый фильтр и следом предварительный сетчатый фильтр.

С нашей точки зрения такая многоступенчатая система фильтрации избыточна и только снижает воздушный поток, хватило бы и одного фильтра-сеточки. В любом случае, поролоновый уж точно лишний. Впрочем, в ходе тестов на первом фильтре собиралось много легкого мусора (и это с чистого пола), то есть мощность всасывания даже со всеми фильтрами относительно высокая. Отметим, что вентилятора в самом пылесборнике нет, поэтому пылесборник и два фильтра (кроме складчатого) можно мыть под водой, главное потом все хорошо высушить.
Боковые щеточки имеют длинную щетину средней жесткости, пучки которой выходят из упругих поводков. Правая и левая щеточки отличаются поворотом поводков, а чтобы пользователь знал, какую куда устанавливать, на щеточках и на днище выдавлены буквы L и R. К оси привода щеточки крепятся с помощью самореза с головкой под крестовую отвертку.
Основная щетка представляет собой цилиндр из резины с лопастями-скребками. Основное преимущество такой безворсовой щетки перед традиционной со щетиной заключается в том, что на эту резиновую не так быстро наматываются волосы, шерсть, волокна и т. д., а все намотавшееся легко снимается при очистке.

На торцы оси щетки плотно насажены заглушки из черного пластика. Из центра одной выходит стальная ось, которая, вращается в шариковом подшипнике, запрессованном в торец оси щетки. На эту ось надевается втулка из резины, которая по замыслу разработчиков должна снижать шум и вибрации.

Щетка в отсеке фиксируется рамкой из желтого пластика. На этой рамке есть резиновый скребок, который помогает щетке подхватывать мусор с пола и забрасывать его в пылесборник.
Отметим, что редукторы приводов щеток и колес позволяют их проворачивать рукой, это очень помогает, когда нужно вытащить робота, например, из-под дивана, под которым он застрял, или распутать что-то намотавшееся на колеса или щеточки.
При уборке передние боковые щеточки подгребают мусор к центру, затем частички мусора закидываются основной щеткой в пылесборник, а поток воздуха помогает засасывать в пылесборник самый легкий мусор. Упругие прокладки на всем пути от входного отверстия пылесборника до вентилятора исключают паразитный подсос воздуха мимо фильтров и пылесборника.
Для влажной очистки гладких полов вместо обычного пылесборника нужно установить входящий в комплект поставки специальный блок с контейнером для воды.

На дно контейнера на липучке прикрепляется махровая салфетка из микроволокна.
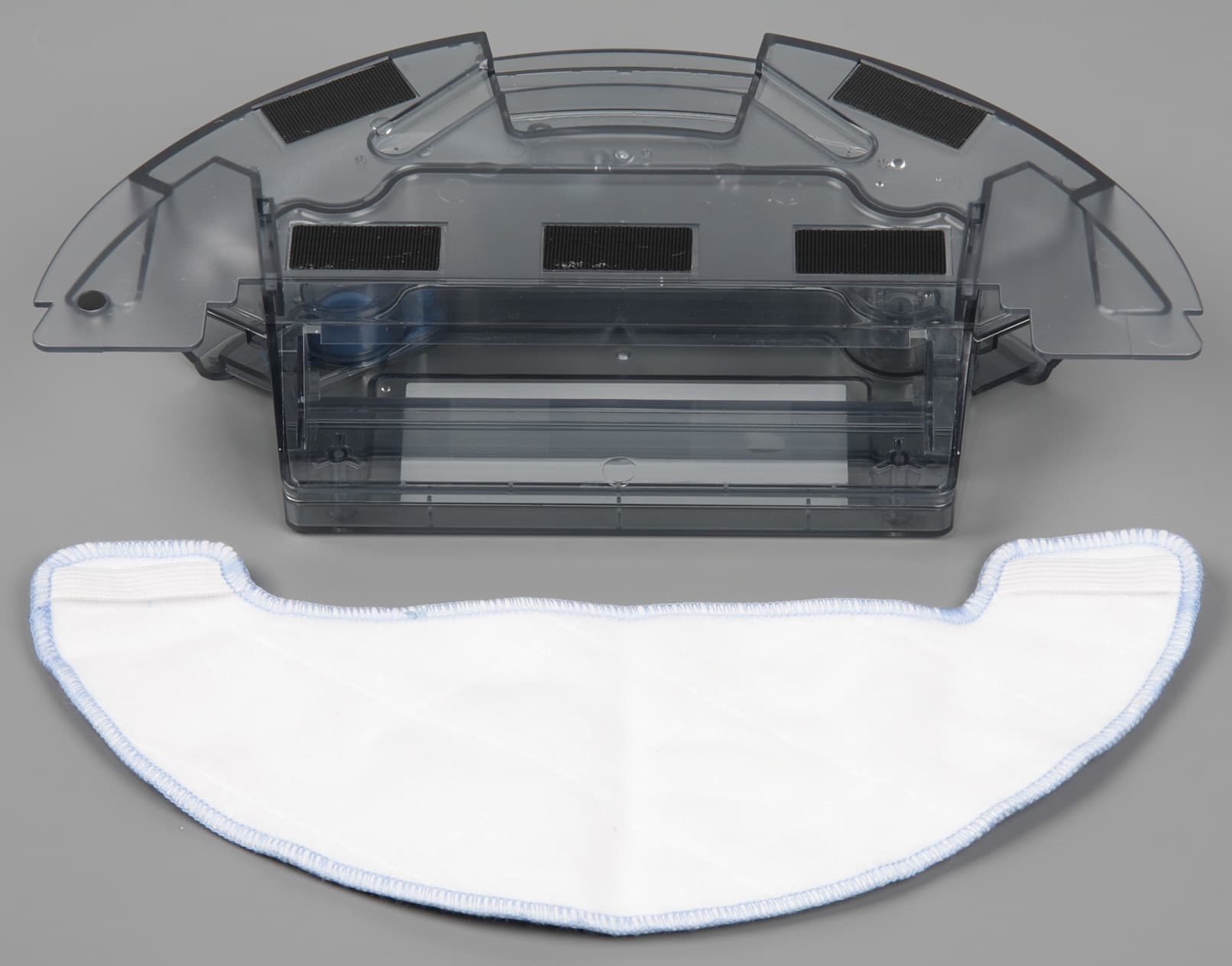
Салфетку можно предварительно увлажнить, а для поддержания ее во влажном состоянии, в резервуар контейнера нужно залить воду. Жидкость на салфетку просачивается через два отверстия в днище резервуара. В процессе уборки нужно следить за уровнем воды, чтобы при необходимости долить воду в резервуар. Электромагнитный клапан, установленный в роботе, дозирует вытекание воды.

В режиме влажной уборки всасывающий вентилятор отключается, но основная и боковые щеточки вращаются, поэтому немного мусора забрасывается в небольшой отсек в передней части блока для влажной уборки. Перед зарядкой робота контейнер для влажной уборки нужно снять.
На правом боку находится разъем питания для прямой зарядки аккумулятора и клавиша, отключающая батарею от основных цепей робота.

В данном роботе установлена литий-ионная аккумуляторная батарея. Батарейный блок составлен из четырех цилиндрических элементов популярного типоразмера 18650.

База, на которой пылесос заряжается, имеет большое основание, на которое снизу наклеены четыре противоскользящие резиновые ножки-накладки.

Питается база от внешнего адаптера питания, который также можно использовать для зарядки робота, минуя базу, если по какой-то причине она недоступна. Кабель можно уложить в каналы на днище базы и вывести на правую или на левую сторону.

К пылесосу прилагается небольшой ИК-пульт дистанционного управления.

Кнопки пульта изготовлены из упругого резиноподобного материала, обозначения на кнопках достаточно крупные и контрастные. Экранчик в передней части пульта показывает текущее время и время, на которое запланирован автоматический запуск уборки.
Данный робот-пылесос имеет четыре режима уборки:
В автоматическом режиме робот последовательно убирает участок за участком, пока не уберет всю доступную ему площадь или до разряда аккумулятора. Включается данный режим нажатием на кнопку Clean на пульте или кнопку Auto на самом роботе. Также этот режим используется во время уборки по расписанию. Завершив уборку, робот возвращается на базу для зарядки аккумулятора.
В классическом режиме робот движется по прямой от препятствия к препятствию, хаотично меняя направление после столкновения, и какое-то время следует вдоль стен. Эти варианты перебираются по циклу. Включается данный режим нажатием на кнопку со стрелками на пульте или на самом роботе. В этом режиме робот убирает или 2 часа подряд, или до разряда аккумулятора. Завершив уборку, робот также возвращается на базу для зарядки аккумулятора.
В ручном режиме уборки направление движения робота задается с помощью кнопок пульта дистанционного управления. Робот движется вперед до столкновения с препятствием после нажатия на стрелку вперед, убирая в движении. Поворачивает на месте на фиксированный угол (слишком большой для точного задания направления) при нажатии на стрелки вправо-влево на пульте. Разворачивается при нажатии на кнопку Max.
Для интенсивной очистки определенного места нужно перенести туда робота или направить его в нужное место в режиме ручного управления, а затем нажать на кнопку со значком спирали на пульте или на самом роботе. Робот начнет уборку по разворачивающейся и потом сворачивающейся спирали в круге диаметром примерно в один метр. В этом режиме вентилятор робота работает на высокой мощности.
Во время уборки в автоматическом и классическом режимах нажатие на кнопку Max на ДУ повышает мощность всасывающего вентилятора робота (повторное нажатие на эту кнопку снижает мощность до нормальной).
Есть возможность назначить ежедневный запуск уборки в автоматическом режиме на определенное время. Для этого на пульте нужно установить текущее время и время начала уборки, контролируя по звуковым сигналам, что таймеры робота и пульта синхронизированы.
Тестирование
Ниже представлены результаты тестирования по нашей методике, подробно описанной в отдельной статье. Сначала в классическом режиме с нормальной мощностью вентилятора:
| Интервал | Общее время уборки, мин. | % (суммарный) |
|---|---|---|
| Первые 10 мин. | 10 | 69,0 |
| Вторые 10 мин. | 20 | 85,5 |
| Третьи 10 мин. | 30 | 88,0 |
| 2 часа | 150 | 94,2 |
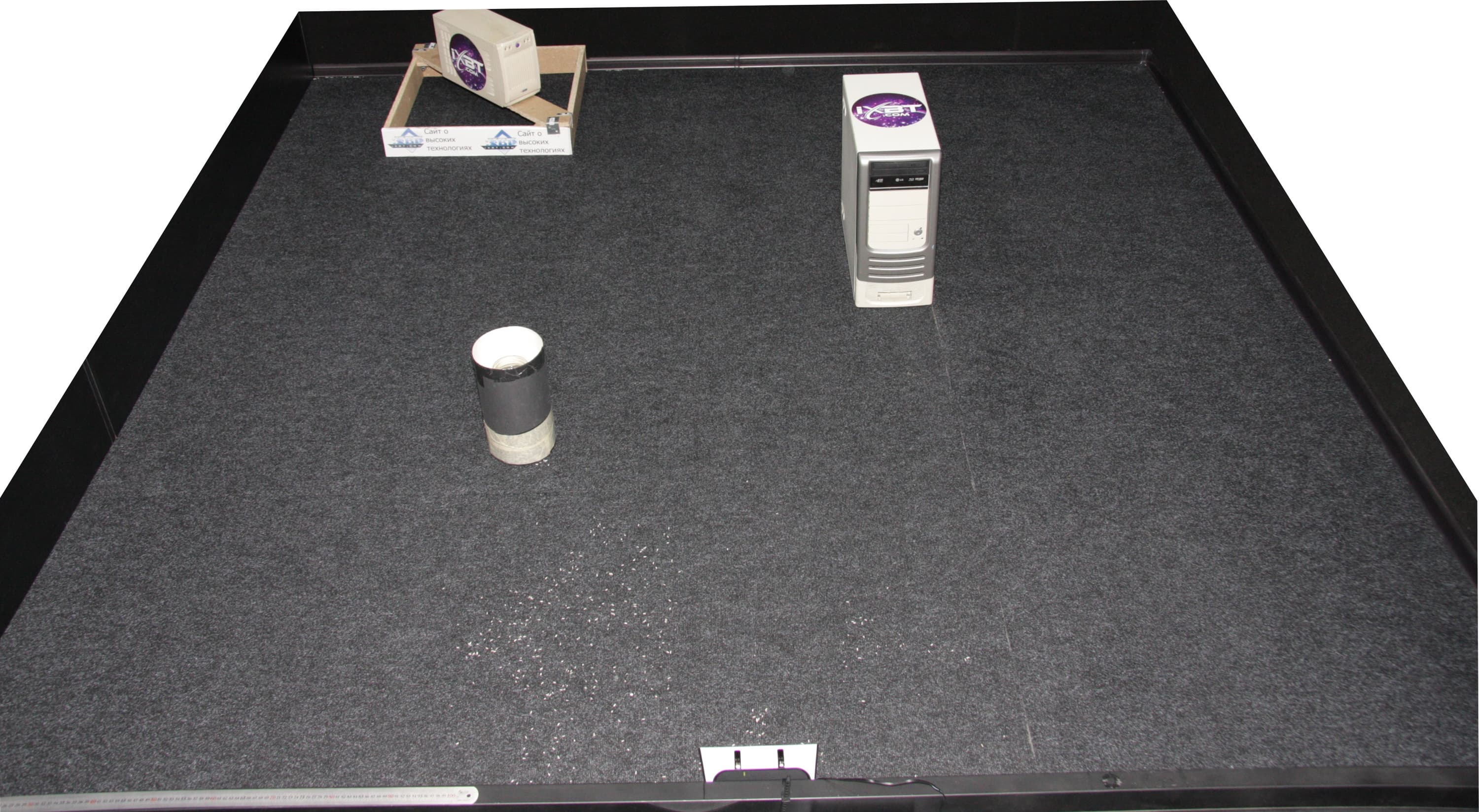
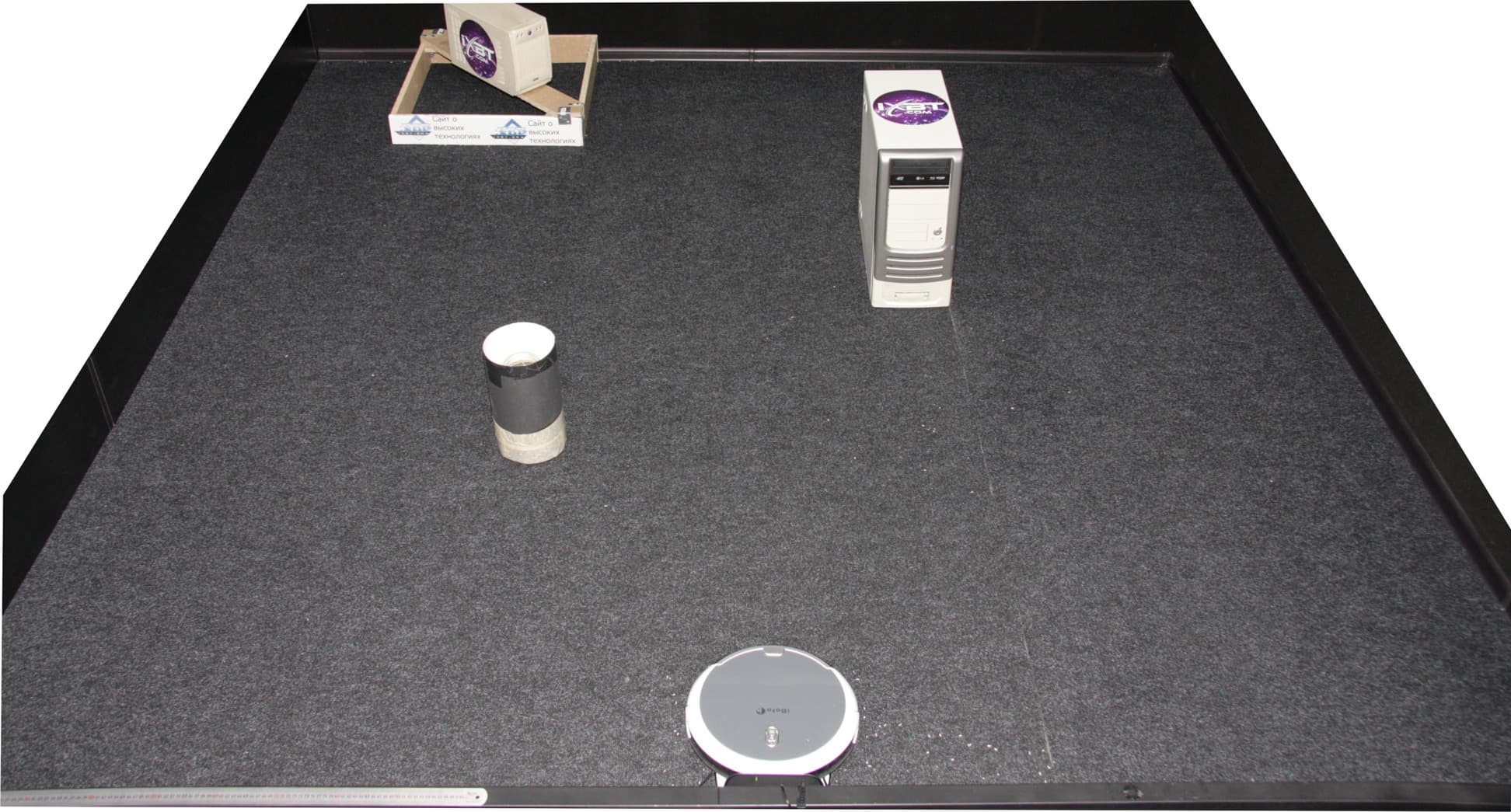
Предыдущие тесты показали, что увеличение мощности вентилятора не приводит к значимому улучшению качества уборки нашего тестового мусора (но точно увеличивает собираемое количество легкого мусора), поэтому все количественные тесты мы проводили с нормальной мощностью. Видео ниже снято с одной точки с почти полным охватом убираемой территории, база находится внизу по центру, при обработке часть видеоряда ускорена в десять раз, показаны только начало уборки (первые 10 минут):
Потенциально качество уборки высокое. Через 10 минут робот собирает немного мусора, но через 30 минут работы мусора на большей части площади остается мало.

В загончике достаточно чисто:
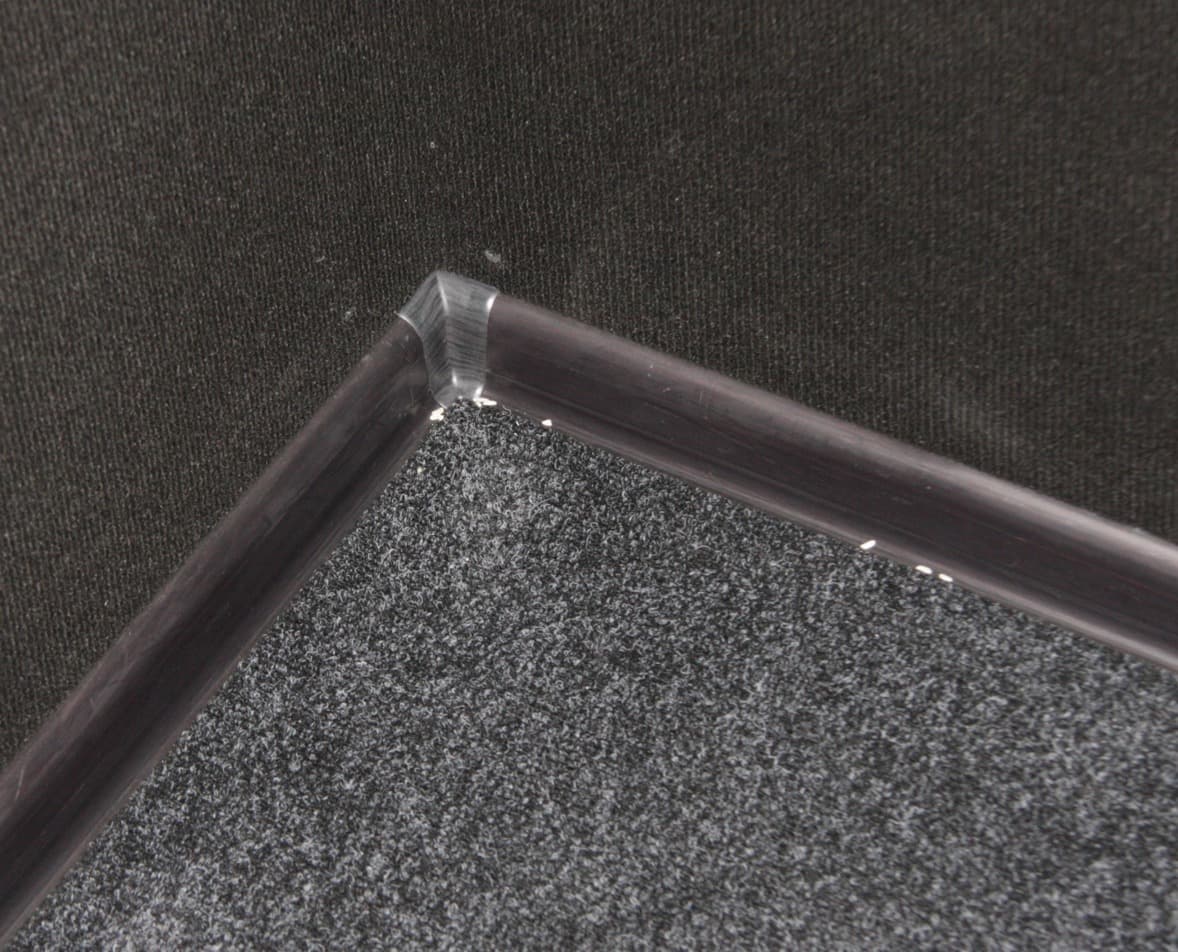
В углах по паре зернышек:
Вот около базы мусора много:

Уборка в течение еще двух часов результат немного улучшила, но около базы мусора все также много:
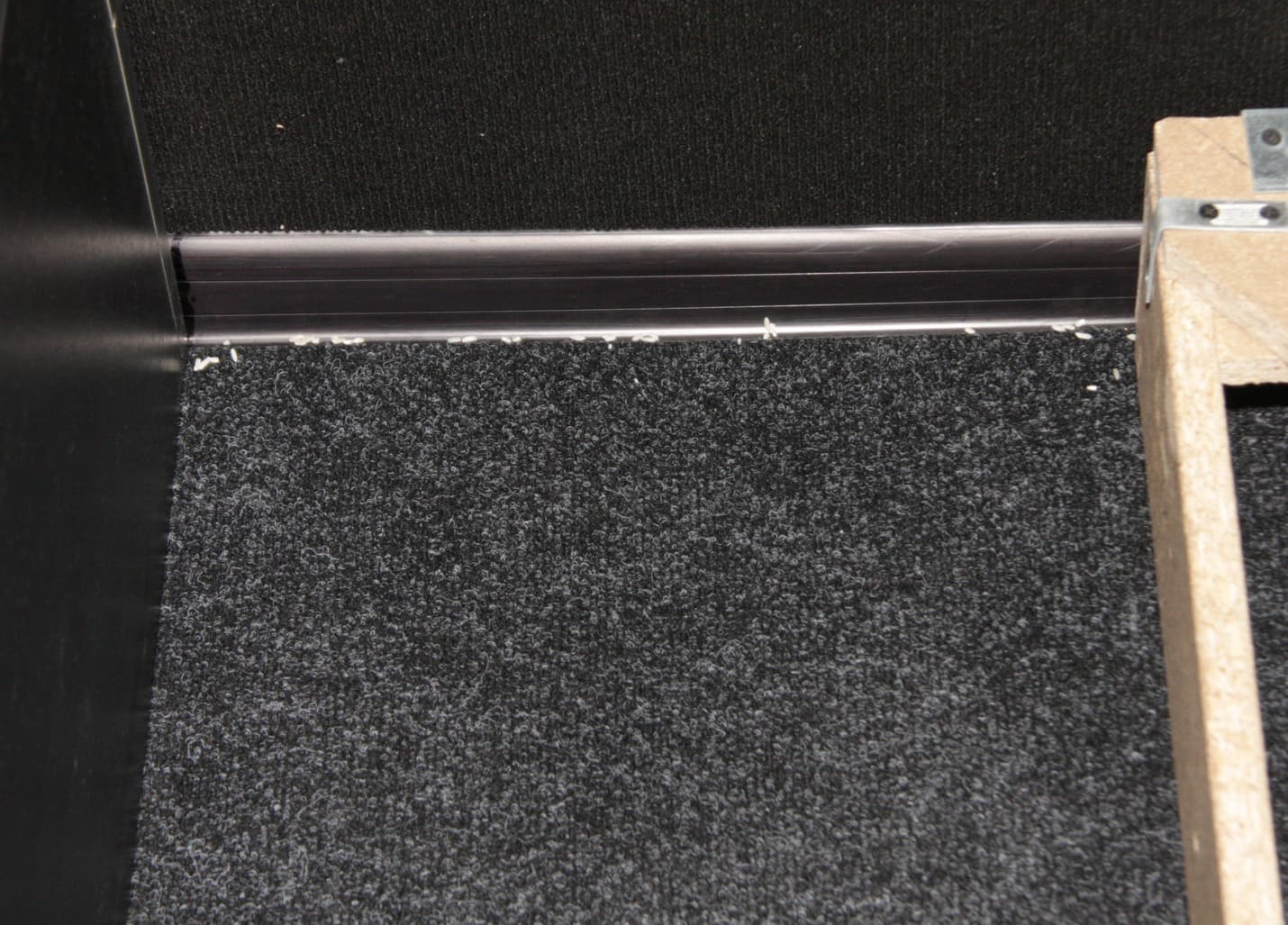
Между высокими вертикальными и хорошо отражающими ИК-лучи стенками и корпусом робота обычно остается небольшой зазор, тогда как к низким, наклонным (например, к плинтусу) или черным в ИК-свете стенкам робот подъезжает вплоть до срабатывания механического датчика в бампере. Загон шире робота всего на 5 см, но это не мешает роботу туда заезжать и хорошо там убирать. С базой робот обращается очень аккуратно, даже слишком аккуратно, не толкает и не сдвигает, но и объезжает ее далеко, оставляя около нее часть мусора. Паркуется робот уверенно и в наших тестах всегда с первого раза.
В автоматическом режиме уборки в движении робота наблюдается определенная схема. Робот сначала обходит участок площади по периметру, не обязательно замыкая его, проходит площадь внутри участка змейкой и еще раз обходит участок по периметру. Затем принимается за следующий участок. Робот не обязательно выполняет однократную уборку доступной ему площади, по крайней мере, на небольшой площади он может пройтись по участкам два или более раз. Робот явно отслеживает свое перемещение в пространстве, а также строит и использует карту убираемой поверхности. В этом ему помогают датчики вращения колес и переднего ролика, а также гироскоп. Видео ниже снято с одной точки с почти полным охватом убираемой территории, база находится внизу по центру, при обработке часть видеоряда ускорена в десять раз, показаны только начало уборки в автоматическом режиме (первые 10 минут):
Эту территорию до автоматического возврата на базу робот убирал 35 минут и собрал 97,6% тестового мусора. Это хороший результат. Почему-то в автоматическом режиме робот подъезжает ближе к базе, что отчасти и обеспечило улучшение качества уборки. Однако робот может проехаться прямо по базе и сдвинуть ее с места. Вот, как выглядит доступная роботу площадь после завершения уборки:
Дополнительно были проведены натурные испытания. Для этого в офисном и относительно чистом помещении был выгорожен участок из нескольких комнат общей площадью примерно 64 м². В коридоре (23 м²) только шкаф в торце, в других помещениях заполнение мебелью среднее, людей нет. Схема помещения приведена ниже. На ней цветными прямоугольниками отмечены доступные роботу комнаты. База робота установлена на схеме внизу справа.
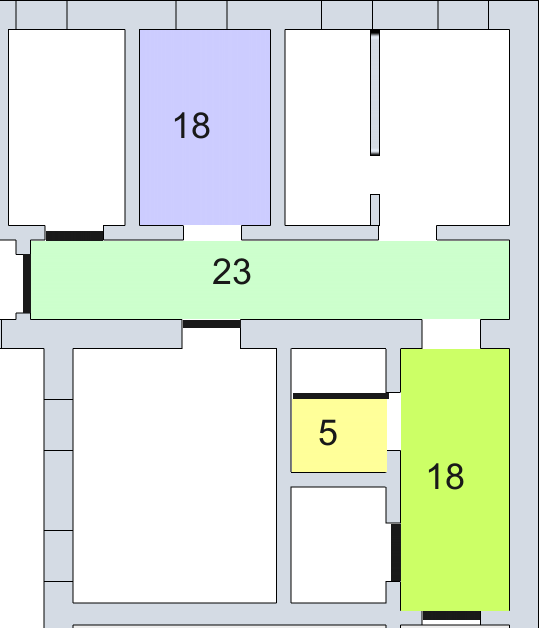
Запуск робота был произведен по расписанию, что означает нормальную мощность вентилятора и режим автоматической уборки. Робот убрал этот участок за 53 минуты и вернулся на базу. Стоит отметить, что, несмотря на препятствия в виде невысоких порожков и ножек многочисленных стульев, робот заезжал, куда мог протиснуться и нигде не застревал. Согласно субъективной оценке (за роботом было постоянное наблюдение) робот убрал везде, где-то и по два-три раза. Возвращался робот на базу 11 минут, неторопливо двигаясь по стеночке, он явно точно не знал, где находится база. Однако, нет сомнений, что способность робота к навигации способствует повышению качества и скорости уборки.
Тест в реальных условиях выявил, что волосы на саму основную щетку не наматываются, но наматываются на боковые щеточки и на торцы основной:
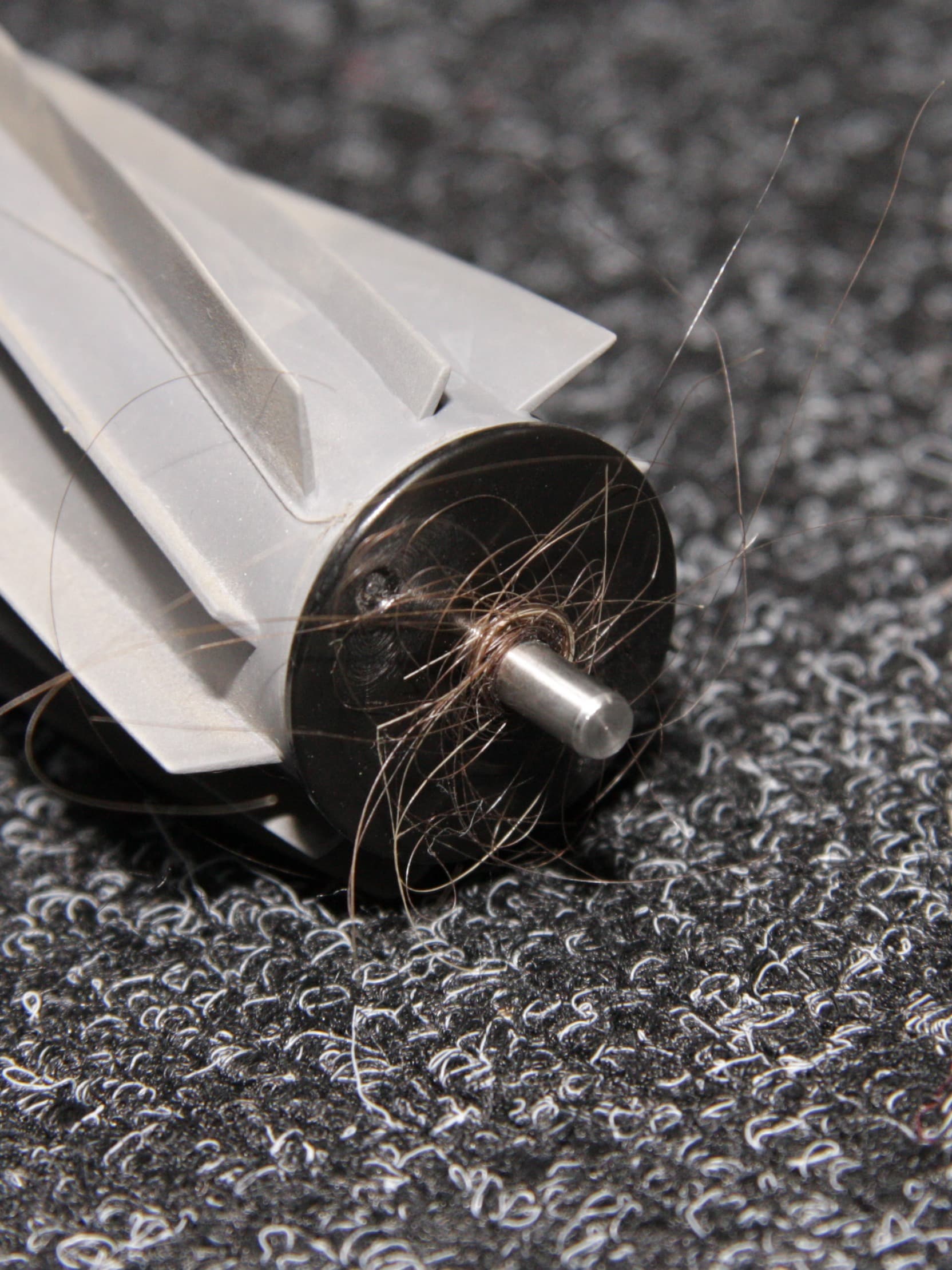

С торцов и боковых щеточек волосы легко снимаются. Такую щетку все равно в разы проще чистить, чем щетку с ворсом.
В режиме влажной уборки робот убирал помещение площадью 30 м² (мебели относительно много) в течение 20 минут, после чего вернулся в ту точку, откуда его запустили. По субъективной оценке робот протер всю или почти всю доступную ему площадь. След был умеренно влажным общей шириной примерно со всю салфетку без видимых пропусков. Израсходовано было 52 мл воды. Так выглядит салфетка после уборки:
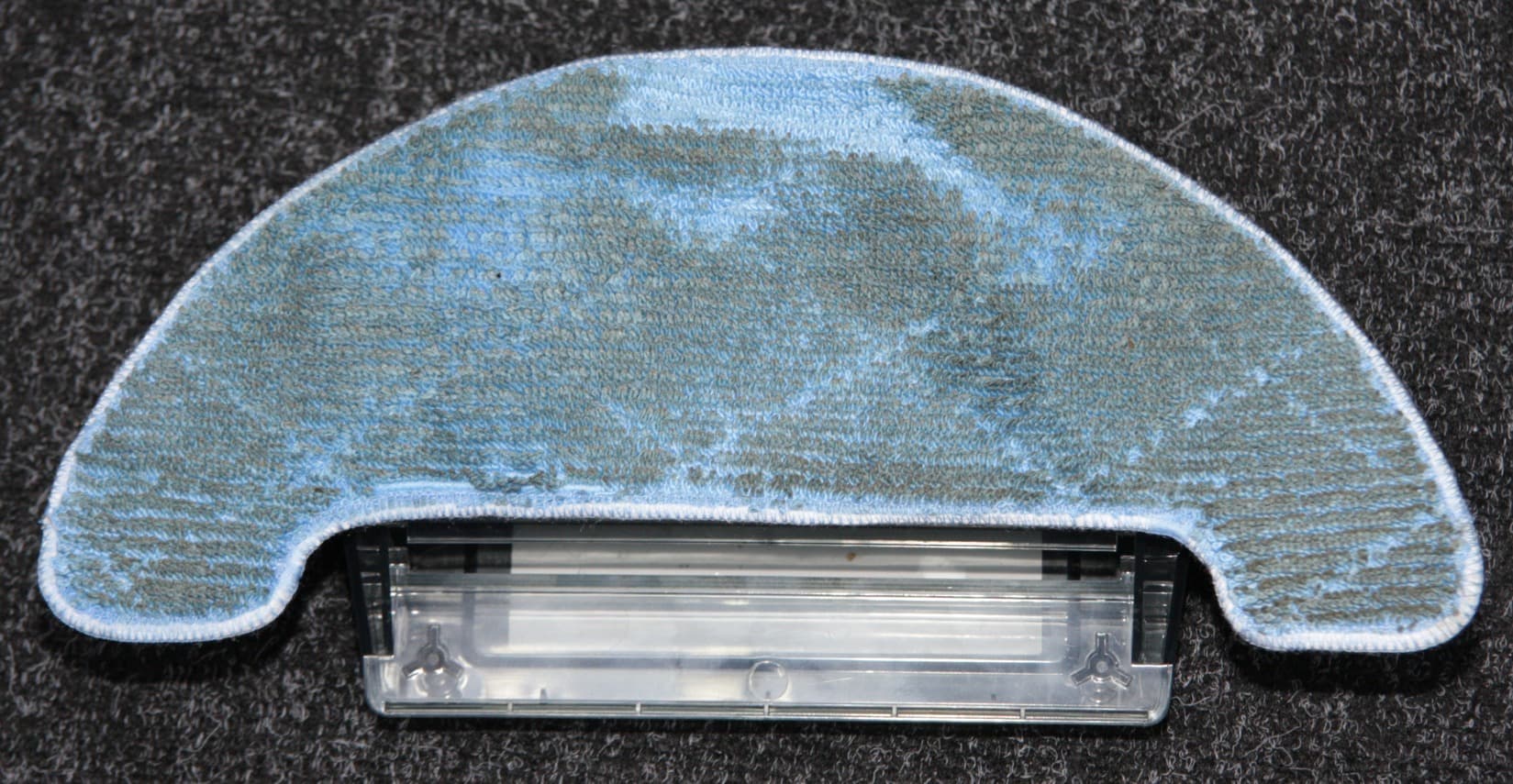
Немного мусора робот набросал в сухой отсек блока для влажной уборки. Отметим, что, с нашей точки зрения, в таком режиме стоит убирать очень гладкие полы с маскирующим разводы рисунком, также перед влажной уборкой этим роботом полы нужно хорошо очистить от мусора (тем же роботом, например).
В режиме локальной уборки робот убирает по разворачивающейся и потом сворачивающейся спирали. Видео ниже это демонстрирует:
В режиме с высокой мощностью вентилятора робот может убирать без подзарядки примерно 1 час 50 мин. В режиме нормальной мощности максимальное время уборки равно 3 часа 12 мин. На восстановление заряда роботу требуется провести на базе 4,5 ч. График потребления от сети при прямой зарядке от адаптера:
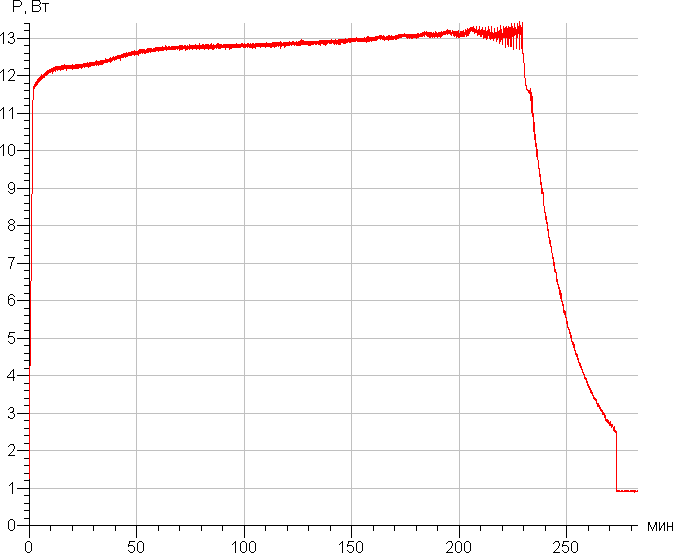
Во время зарядки напрямую от адаптера питания от сети потребляется до 13 Вт с небольшим. 0,9 Вт потребляется роботом после окончания зарядки и 0,6 Вт потребляет база без робота.
Уровень шума увеличивается при включении вентилятора на максимальную мощность.
| Мощность вентилятора | Уровень шума, дБА |
|---|---|
| Нормальная | 52 |
| Максимальная | 55 |
В режиме нормальной мощности вентилятора робот относительно тихий. Характер издаваемого им шума не раздражает, находиться в одной комнате с работающим роботом более-менее комфортно. На максимальной мощности вентилятора робот уже средний по громкости, поэтому, хотя характер издаваемого им шума все также не очень раздражает, находиться в одной комнате с работающим роботом еще можно, но кино смотреть без изолирующих наушников неприятно. Для сравнения, уровень шума в этих условиях обычного (не самого тихого) пылесоса равен примерно 76,5 дБА.
Выводы
В автоматическом режиме iBoto Smart X610G Aqua последовательно участок за участком убирает доступную ему площадь помещения и возвращается на базу для зарядки аккумулятора. Качество уборки в этом режиме высокое. При необходимости пользователь может увеличить мощность вентилятора, активировать классический режим уборки со случайным характером движения, вручную управлять движением робота, включать режим интенсивной очистки локального участка, также робота можно запрограммировать на ежедневную уборку в заданное время. Функциональность робота дополнена способностью выполнять влажную уборку гладких полов. Для этого взамен обычного пылесборника нужно установить специальный контейнер с резервуаром, предварительно заполненным водой, а на днище этого контейнера следует закрепить чистящую салфетку, которая во время движения робота увлажняется жидкостью из резервуара и протирает пол. К особенностям робота относится безворсовая резиновая щетка, на которую в меньшей степени наматываются волосы, шерсть, нитки и пр., поэтому данного уборщика можно рекомендовать при наличии шерстистых домашних животных.
Достоинства
- Автоматический режим с навигацией
- Безворсовая основная щетка
- Специальный блок для влажной уборки
- Есть режим с повышенной мощностью всасывания
- Тихая работа в режиме с нормальной мощностью вентилятора
- Эффективные боковые щеточки
- Невысокий корпус
- Уборка по расписанию
- Хорошая комплектация
Недостатки
- Оставляет много мусора около базы
- Маркая верхняя панель
В заключение предлагаем посмотреть наш видеообзор робота-пылесоса iBoto Smart X610G Aqua:
Наш видеообзор робота-пылесоса iBoto Smart X610G Aqua можно также посмотреть на iXBT.Video