Установка для съемки панорам на базе контроллера Freeduino, часть 1, механическая
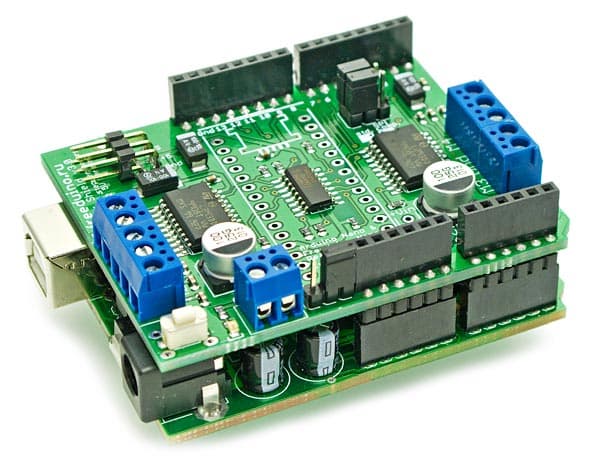
Эта статья — развитие темы использования компьютера в фотографии. «Идеологически» тема раскрыта в статье «Фотокубики». Практическая сторона — в статье «(Лего)Фоторобот: конструктор Lego Mindstorms + фотокамера Canon с CHDK». То, что было реализовано на основе Lego Mindstorms, будет сделано на основе Freeduino (совместимый с Arduino клон). Контроллер Freeduino Through-Hole с платой расширения управления электродвигателями Motor Shield v3 будет управлять шаговым двигателем, поворачивающим камеру Canon PowerShot G9 в процессе съемки панорам, а также «нажимать» на спусковую кнопку камеры в заданный момент. Этой модели камеры не повезло с дистанционным управлением (его просто нет), но задачу можно решить с помощью альтернативной прошивки СHDK, как это описано в статье «CHDK и Canon PowerShot G9».
«Компьютерная» (аппаратная и программная) часть задачи — наименее трудоемкая. Контроллер и плату расширения можно просто купить (если рядом не продается, можно заказать по почте, что я и сделал). ПО — распространяется свободно, в освоении не сложно. Программу управления контроллером, если не требуется изысканный интерфейс, можно написать (или собрать из заготовок) и отладить за минуты. Наиболее сложная часть задачи — сделать работающую и более-менее надежную механическую часть.
Для решения задачи поворота легкой камеры будет использоваться шаговый двигатель средней мощности без редуктора. Его можно найти в отслужившей свое технике или купить вместе с Arduino/Freeduino.
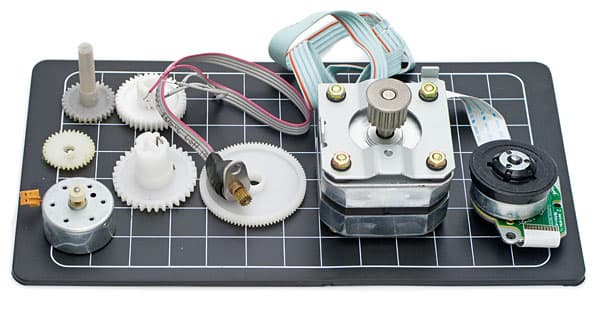

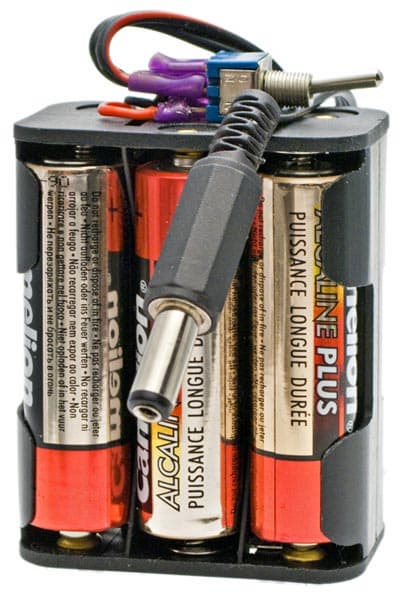
В установке для поворота камеры будет использоваться шаговый двигатель от принтера Epson. EM-258 / STP-42D151, судя по описаниям в Сети, это биполярный двигатель с числом шагов на полный оборот 200, напряжением питания до 42 В и сопротивлением 10 Ом. Для экспериментов с микроконтроллером, имеющим ограничение по току нагрузки, фактически достаточно знать только сопротивление обмоток, которое можно измерить с помощью омметра. Число шагов на полный оборот без труда определяется экспериментальным путем. Для питания такого двигателя в установке будет использоваться блок питания из 6 элементов АА.
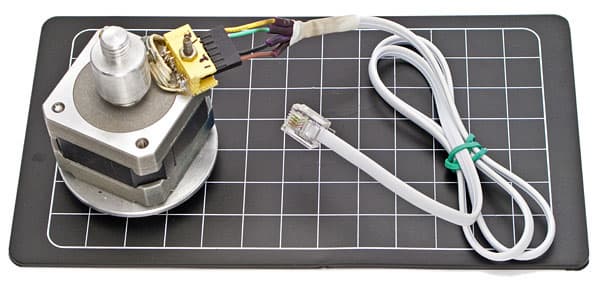
Так как установка будет использоваться в полевых условиях, непосредственный монтаж электрических и сигнальных цепей на плату Freeduino был бы ненадежным вариантом. Контроллер с платой расширения управления шаговыми двигателями, блок питания и более надежные клеммы, чем контакты для штыревого монтажа самой Freeduino, нужно разместить на жесткой платформе. Также нужно предусмотреть крепление платформы к штативу. В качестве электрических разъемов были выбраны шестиместные RJ (стандартные телефонные RJ-14, в которых задействованы четыре центральных контакта), понравившиеся мне еще по экспериментам с Lego Mindstorms (к сожалению, в Lego используются разъемы с нестандартным замком). Их преимущества: доступность и наличие замков-фиксаторов.

Основная платформа изготовлена из жесткого пластика (пластиковая разделочная доска). На нее наклеиваются два (или больше — для дальнейшего расширения функциональности) телефонных раздвоителя (раздвоитель был выбран, так как переходников «1 в 1» я найти не смог). В платформе нужно просверлить дырки для крепления Freeduino (на фотографии в них уже установлены болтики с диэлектрическими прокладками) и дырки для навески платформы на штатив. Блок питания крепится к платформе канцелярскими резинками также через проделанные в соответствующих местах платформы отверстия.
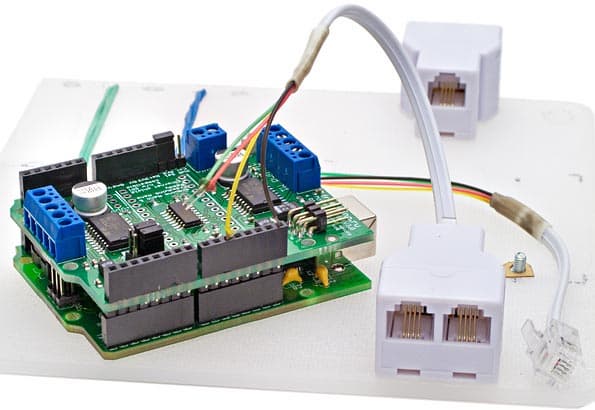

Сборка управляющей установки сводится к установке платы Freeduino на платформу, подключению соединительных проводов к раздвоителям и соответствующим клеммам Freeduino (через выводы платы Motor Shield v3, установленной сверху на основной блок контроллера), установке аккумуляторов или батарей в блок питания и креплению блока питания на платформу.
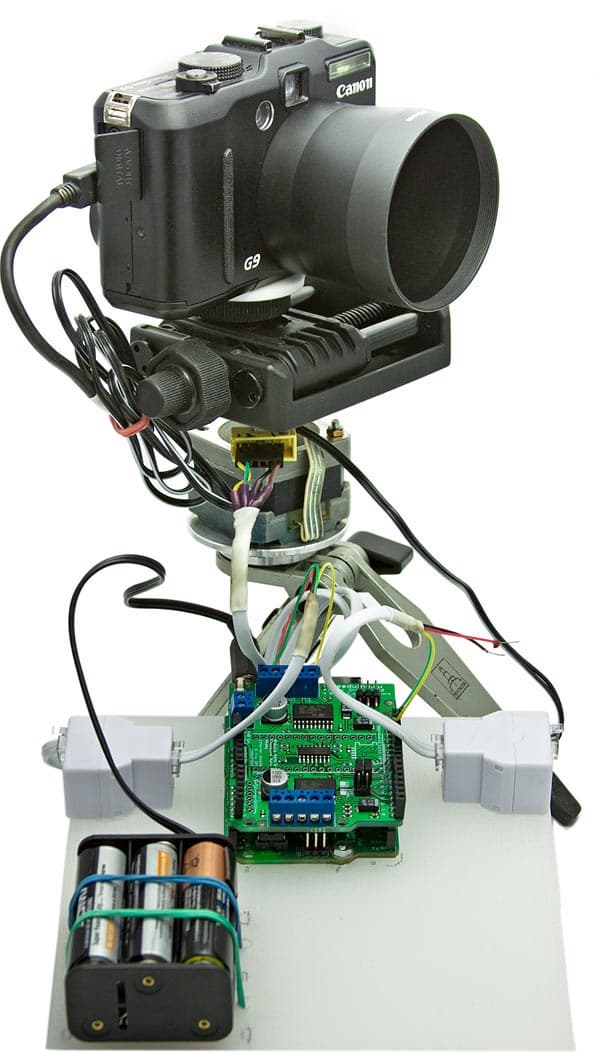
Шаговый двигатель монтируется на штатив, а не него устанавливается камера. Так как штативное гнездо камеры находится не на оптической оси объектива, между шаговым двигателем и камерой нужно установить переходную площадку. Я использую площадку с регулятором положения от макроустановки Velbon Super Mag Slider (описана в статье «Приспособление для точной фокусировки при макросъемке Velbon Super Mag Slider»). На месте съемки шаговый двигатель и камера подключаются к управляющему блоку с помощью кабелей с вилками/розетками RJ. Установка в рабочем состоянии изображена на снимке в начале статьи.
Для съемки нужно включить камеру, запустить CHDK → USB дистанционное управление, и подать питание на контроллер управления. Программирование контроллера описано в следующей статье.