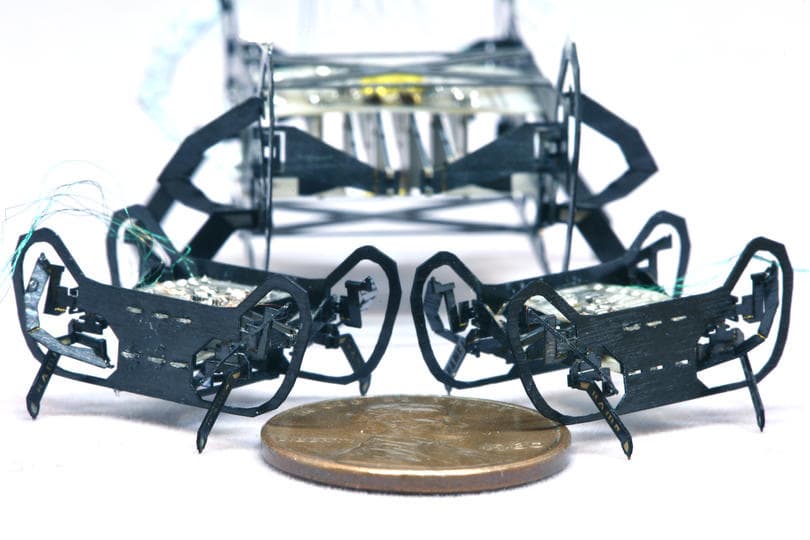
Специалисты Гарвардского университета создали миниатюрного робота, который называется HAMR-JR. Как это нередко бывает, создатели HAMR-JR черпали идеи у живой природы. Точнее говоря, в данном случае источником вдохновения и объектом для подражания послужил таракан. Более того, HAMR-JR — уже второе поколение роботов-тараканов, созданных в Гарварде. Он меньше своего предшественника, который носил название HAMR, но это почти не отразилось на способностях робота.
«Большинство роботов такого масштаба довольно просты и демонстрируют только базовую мобильность, — сказал Каушик Джаярам (Kaushik Jayaram), один из авторов проекта. — Мы показали, что уменьшая размеры, не обязательно жертвовать подвижность или управляемостью».
Одной из целей проекта была проверка возможности применения технологии PC-MEMS (printed circuit microelectromechanical systems) для серийного изготовления роботов разных размеров. Суть этой технологии состоит в изготовлении плоских деталей, которые затем складываются в трехмерные. Чтобы изготовить HAMR-JR, исследователи просто уменьшили двухмерную конструкцию робота HAMR вместе с исполнительными механизмами и встроенной схемой, чтобы воссоздать меньшего робота со всеми теми же функциями.
«Замечательная часть заключается в том, что нам не пришлось ничего менять в предыдущем дизайне, — пояснил Джаярам. — Мы доказали, что этот процесс можно применять практически к любому устройству различных размеров».
Робот HAMR-JR длиной 2,25 см весит около 0,3 г. Он может двигаться со скоростью около 14 длин тела в секунду, что делает его не только одним из самых маленьких, но и одним из самых быстрых микророботов.
Уменьшение масштаба изменяет некоторые параметры — например, длину шага и жесткость сустава, поэтому исследователи также разработали модель, которая позволяет прогнозировать такие показатели, как скорость перемещения, сила ног и полезная нагрузка, исходя из размеров робота. Эту модель можно использовать для проектирования системы с требуемыми спецификациями.


