Содержание
- Вступление
- Автопилотируемая платформа Pegasus
- Сотрудничество с Deutsche Post
- Автомобили выставки
- Демонстрационные заезды
- Выступление компании Яндекс
- Стенд компании ZF
- Заключение

Вступление
Вот уже второй год технологическая конференция GPU Technology Conference (GTC) проводится далеко не только в Калифорнии, где она традиционно проходила несколько лет, каждой весной. Начиная с 2016 года, компания Nvidia расширила круг своего присутствия в мире разработчиков ПО, проводя свои конференции не только в Кремниевой долине, но и в других местах. В этом году это Китай, Германия, Израиль, Тайвань, Япония и еще раз США, но уже Вашингтон, а не Сан-Хосе.

На прошлой неделе GTC Europe прошла в Мюнхене, и совершенно неудивительно, что в самом автомобильном краю Европы, львиная доля выступлений и анонсов была посвящена именно автомобильной тематике. В частности — автономным средствам передвижения, в разработке и продвижении которых компания Nvidia принимает самое непосредственное участие уже несколько лет. У них даже есть собственный автономный автомобиль BB8, предназначенный для обкатки различных решений по автопилотам.
Внимание к теме автопилотирования сейчас просто бешеное — тут можно вспомнить об успехах Tesla Motors и их совместных разработках с Nvidia, которые многих вдохновили, да и другие варианты помощи водителям в современных автомобилях сейчас у всех на слуху. Так, тема электронной помощи водителям в моей поездке на европейскую GTC была затронута еще в самолете, когда в октябрьском журнале «Аэрофлота» я увидел рекламу автомобиля Audi A8, имеющего некоторые возможности автопилота — причем, Nvidia и тут приложила руку со своими решениями, которые применяются в этой модели.

Но давайте обо всем по порядку. Для начала давайте разберемся, какие вообще могут быть системы автопилотирования в принципе. Надо же их как-то делить по способностям, от простых к сложным. Принято, что существует пять уровней «автономности» автомобилей, не считая нулевого — для тех транспортных средств, у которых может даже и есть помощники для водителей, но пассивные, не влияющие на управление. В таких автомобилях водитель должен постоянно контролировать управление автомобилем как по разгону и торможению, так и поворачивать руль. А электронные помощники в принципе быть могут, но они или просто предупреждают об опасности или только экстренно тормозят, к примеру.
- Уровень 0 — водитель постоянно контролирует движение, помощников или нет или они только предупреждают об опасности.
- Уровень 1 — помощники есть, но водитель все равно постоянно контролирует движение, а электроника лишь помогает процессу управления. На этом уровне водитель может доверить электронным помощникам управление динамикой или рулением, но только в определенных условиях. Подобные помощники есть на многих современных автомобилях, многие уже пробовали адаптивный круиз-контроль, который умеет тормозить и разгоняться, в зависимости от обстановки.
- Уровень 2 — частично автоматизированное управление, при котором автомобиль может ехать сам в некоторых условиях, но водитель обязан следить за управлением. На втором уровне способностей электроника отвечает и за ускорение и за торможение и за повороты, и даже уже способна вести автомобиль самостоятельно, но не во всех условиях. При этом водитель обязан следить за дорожным движением всегда и при необходимости сразу же брать управление в свои руки. Этот уровень уже есть в некоторых автомобилях, хотя вопрос четкого разделения на уровни не так прост.
- Уровень 3 — полуавтоматизация, при которой автопилот выполняет движение в автоматическом режиме при некоторых условиях и водитель может не контролировать автомобиль постоянно. То есть, он может отпускать руль при движении по современным автострадам, а машина может потребовать от человека вмешаться в процесс лишь при необходимости, если сама не справляется. Говорят, что последние версии автопилотов Tesla и Audi A8L относятся именно к этому уровню, но... самые большие проблемы автопилотирования во многих странах связаны вовсе даже не с ПО и не с аппаратным обеспечением, а с законодательством — творцы законов инертны и не могут быстро определиться со всеми нюансами.
В некоторых странах меньше ограничений, в других их больше. Для большинства стран мира действует венская конвенция о дорожном движении от 1968 года, которая гласит, что водитель обязан постоянно контролировать автомобиль. И нужно какое-то время, чтобы изменить эти законы. Та же новая Audi A8 теоретически уже умеет ездить и без участия человека, когда водителю даже не нужно трогать руль в условиях города и на шоссе, но пока что водителя просят примерно раз в полминуты дотрагиваться до руля, а если он этого не делает, то она остановится. - Уровень 4 — продвинутая автоматизация, когда водитель не требуется в большинстве условий, при которых система автопилотирования сама справляется с управлением. Но и это еще не полностью независимый от человека автопилот. В самых сложных случаях человек все-таки остается необходим для ручного управления. Сложные условия в данном случае это плохая видимость, плохие дороги с отсутствием явных границ, разметки и т. д. Зато во всех обычных ситуациях автопилот будет действовать сам, а иногда машина сможет ездить в принципе без водителя — самостоятельно парковаться у дома, например.
- Уровень 5 — наконец-то полностью автономное управление! Автопилоты этого уровня будут способны управлять машиной самостоятельно во всех случаях, полностью контролируя процесс управления. Главное, что водитель тут не требуется в принципе, и даже органы управления могут отсутствовать — представьте этакое роботизированное такси. Это очень важное отличие от всех предыдущих уровней, которые все же предполагают вмешательство человека в управление, в большей или меньшей мере. Понятно, что именно этот уровень и является той самой целью, к которой стремятся все автомобильные производители и стартапы. Пока что невозможно точно сказать, когда появятся автомобили, соответствующие этому уровню, но естественно, что разработки давно в процессе, и это — вопрос нескольких лет.
До сегодняшнего дня лучшим продуктом компании Nvidia, предназначенным для автопилотируемых автомобилей, была платформа Drive PX 2. Она основана на мобильных чипах компании, отличается высокой производительностью для своего размера и энергопотребления и поддерживает все необходимые сенсоры: радары, лидары, камеры и т. д. В процессе работы можно использовать различные алгоритмы: глубокое обучение, машинное зрение, параллельные вычисления и другие. Платформа имеет сертификат уровня безопасности автомобиля ASIL-D (Automotive Safety Integrity Level) и полностью интегрирована в собственный прототип автопилотируемого автомобиля компании под названием BB8, на примере которого можно убедиться в ее работоспособности.
Индустриальные аналитики ожидают (и не нужно быть семи пядей во лбу, чтобы понять их правоту в данном случае), что очень скоро произойдет революция в сфере автономных автомобилей, и эта индустрия вырастет в несколько раз — они прогнозируют рост до 285 миллиардов долларов к 2030 году. Уже сейчас такими проектами занимается множество компаний, как крупных автопроизводителей, так и маленьких стартапов.

К примеру, китайский поисковый гигант Baidu уже несколько лет работает над технологиями самоуправляемых автомобилей, и недавно они заключили соглашение с китайским автопроизводителем BAIC, который должен будет начать выпуск самоуправляемых машин третьего уровня с технологиями Baidu уже в 2019 году. До четвертого уровня автономности они должны будут дорасти к 2021 году. Также, компания Baidu объявила о создании фонда беспилотного вождения Apollo Fund, помогающего китайским производителям в конкуренции с западными компаниями. За три года планируется выделить более полутора миллиардов долларов сотне стартапов, занятых темой беспилотных автомобилей. Сразу видно, что все настроены серьезно.
А что на Западе? Компания Intel еще весной купила компанию Mobileye, чьи технологии часто используются при создании беспилотных автомашин, и недавно анонсировала совместную работу с компанией Waymo, использующей технологии Mobileye, по созданию беспилотных автомобилей четвертого и пятого уровней. Intel обеспечит партнера новыми технологиями и вычислительными мощностями, а те, по слухам, планируют запустить сервис беспилотного такси уже этой осенью, но пока что только в некоторых городах США. В октябре планируется коммерческий запуск первых беспилотных автомобилей в штатах Феникс и Аризона, в которых разработки компании уже были ранее протестированы.
Представители же японской Toyota, использующей решения Nvidia в разработке автопилотов, объявили примерное время начала испытаний автономно управляемых электромобилей — к 2020 году. Причем, они планируют сохранить органы управления даже в тех моделях, которые обойдутся и без управления человеком, но также будут подготовлены и специализированные транспортные средства без руля и педалей. Полезным новшеством Toyota считает голосовой интерфейс, аналогичный цифровым помощникам с искусственным интеллектом в смартфонах, типа Siri и Google Assistant. При помощи автопомощника пассажиры должны будут взаимодействовать с автомобилем, и, по мнению японцев, автомобиль должен стать другом человека, запоминая его предпочтения и даже предугадывая некоторые желания. Об этом же на своем выступлении на GTC 2017 в Европе говорила и компания Mercedes-Benz.

Если же говорить о решениях Nvidia, то довольно много крупных автомобильных компаний и стартапов по теме автопилотирования использует именно программно-аппаратные решения калифорнийской компании. В частности, платформу Nvidia Drive PX использует 145 небольших компаний, и это число постоянно растет — платформа действительно упрощает работу и позволяет сократить сроки и стоимость разработок в сфере самоуправляемых автомобилей.
Автопилотируемая платформа Pegasus
Вроде бы все идет хорошо, и у компании Nvidia уже есть второе поколение платформы — Drive PX 2 с приличными возможностями, но... при всей его уникальности, оно все же слабо для того, к чему все стремятся — для Уровня 5 автопилотирования вычислительные возможности этой версии платформы не дотягивают. Ведь полностью автономные роботизированные такси потребуют совершенно иного уровня производительности, по сравнению с нынешними решениями уровней 2 и 3.
В частности, они нуждаются примерно в 10 раз большем разрешении изображений с камер, то есть, применения большего количества качественных камер, обработке данных с большего количества лидаров при полном 360-градусном обзоре, постоянном отслеживании всех окружающих объектов, сложном планировании маршрута, контролем над его соблюдением и т. п. Также требуется в том числе и некоторая излишняя производительность для неоднократного резервирования расчетов, в несколько раз превышающая минимально необходимую производительность для выполнения задачи.
Как раз на европейской конференции GTC в Мюнхене глава Nvidia Дженсен Хуанг и анонсировал новый продукт, который должен стать первым в мире аппаратным решением, подходящим для создания полностью автономных роботизированных такси. Новая платформа получила кодовое имя Pegasus и она расширяет возможности вычислительной платформы Nvidia Drive PX до пятого уровня автономности — полностью автономных транспортных средств, не требующих участия человека в управлении.

Платформа Nvidia Drive PX Pegasus обеспечивает производительность на уровне 320 триллионов операций в секунду, что более чем в 10 раз быстрее предшественника — Nvidia Drive PX 2. Это делает принципиально возможным создание нового класса транспортных средств, работающих без водителя и не имеющего органов управления: руля, педалей и т. п. Подобные роботакси будущего прибудут по требованию пассажира и доставят его к месту назначения. Если говорить вкратце, то это позволит оптимизировать транспортные потоки в городах, снизит нагрузку на парковочные места и приведет к общему снижению аварийности на автодорогах.
Платформа Drive PX уже получила широкую поддержку автомобильной индустрии, практически все производители и маленькие компании используют именно возможности решений Nvidia при разработке транспортных средств 4 и 5 уровней автономности. Из 225 партнеров, работающих с платформой Nvidia Drive PX, более 25 компаний уже занимаются разработкой полностью автономных роботакси, используя возможности настольных GPU компании Nvidia. Багажники подобных рабочих прототипов загружены целыми серверными стойками на основе нескольких графических процессоров Nvidia, использующих возможности глубокого обучения и другие алгоритмы параллельных вычислений. Конечно же, такое решение не подойдет для производства автомобилей, а только для обкатки технологий на практике.
Требования к вычислительным способностям полностью автономных платформ просто огромные, ведь обработка и анализ данных с нескольких камер и лидаров в высоком разрешении и отслеживание объектов в пространстве с необходимой точностью требует большого количества вычислений. И все они должны быть выполнены безошибочно, ведь от этого зависит безопасность окружающих. Если сравнивать современные автомобили с зачатками возможностей автопилотов с полностью беспилотными роботакси, последние требуют в 50-100 раз большего количества вычислений.

И такие возможности предоставляет Drive PX Pegasus, который основан на четырех высокопроизводительных чипах компании Nvidia: двух новейших однокристальных системах Xavier, графическое ядро в которых основано на архитектуре Volta, и двух дискретных GPU следующего поколения (даже еще не анонсированного!), специально оптимизированных для ускорения задач машинного зрения и глубокого обучения. Неудивительно, что платформа имеет вычислительную производительность в 320 TOPS (триллионов операций, используемых в глубоком обучении, в секунду), и дает возможность создания полноценных автономных роботакси на базе специализированной системы небольшого размера, имеющей сравнительно низкое энергопотребление в 500 Вт. А комбинированная пропускная способность памяти для решения в целом превышает 1 терабайт/с.
Кстати, можно вычислить примерную производительность этих самых GPU следующего поколения. Если общая скорость вычислений для Pegasus равна 320 TOPS, то до 60 из них приходятся на пару Xavier, а оставшиеся 260 распределены между двумя GPU. Получается, что производительность одного графического процессора равна 130 TOPS — чуть выше, чем у Volta V100, имеющего производительность в 112-125 TOPS. Но тут нужно учитывать, что энергопотребление одной системы на Volta составляет 250-300 Вт, а весь Pegasus, состоящий из пары Xavier и пары неназванных GPU, довольствуется 500 Вт. То есть, новые GPU будут еще более энергоэффективными.
Платформа Pegasus разработана с сертификацией ASIL-D — индустриальным стандартом безопасности, и поддерживает CAN-шину, Flexray, 16 скоростных входов для камер, радаров, лидаров и других датчиков, а также несколько 10-гигабитных разъемов Ethernet. Платформа Drive PX не обязательно должна состоять из четырех процессоров, она масштабируется от одной однокристальной системы, обеспечивающей возможности уровней автономности 2 и 3, до полноценного четырехчипового решения из двух пар SoC и GPU с поддержкой уровня 5. Все конфигурации используют единую программную архитектуру Drive PX и это дает возможность одновременной разработки различных продуктов — от использующих возможности частичного автопилотирования на трассах, до полностью автономных роботакси.
Хотя платформа Pegasus основана на еще не анонсированных GPU все еще неизвестной публике архитектуры, компания Nvidia заявляет о доступности платформы для партнеров уже во второй половине 2018 года, а ранний доступ для партнеров будет обеспечен в конце первого квартала следующего года. С одной стороны, до этого момента еще долго, с другой — пока что на горизонте не видно ни одного конкурента для Pegasus даже с учетом этого времени. Тем более, что разработку под Pegasus можно вести уже сейчас, используя другие решения Nvidia, ведь программное обеспечение DriveWorks и ранние версии платформы Drive PX доступны разработчикам уже сейчас.
Почему же Дженсен анонсировал Pegasus задолго до появления первых образцов даже у избранных партнеров, и не слишком ли был оптимистичен глава компании с этими сроками? Главное, что нужно было дать понять рынку, что у компании есть чем бить своих потенциальных конкурентов, да и партнерам полезно рассказать о том, что их ждет в ближайшем будущем. Ведь даже при том, что известная компания Tesla на данный момент использует решения Nvidia Drive PX в качестве вычислительных систем в своих моделях, расслабляться калифорнийцам точно не стоит. Понятно, что все сейчас стараются тянуть одеяло на себя и делать максимум своего, чтобы не зависеть от других компаний и выиграть больше в случае успеха.
Вот и Tesla Motors, по слухам, занимается разработкой некоего собственного процессора, который позволил бы уйти от партнерства с другими компаниями, максимально эффективно оптимизировав собственное ПО под свое же железо. Для проектирования последнего у компании есть специалисты по разработке процессоров и однокристальных систем, но также возможна и совместная разработка с кем-то другим. Впрочем, пока что это лишь слухи, и в имеющихся автомобилях Tesla используются именно решения Nvidia. И если решения калифорнийцев продолжат быть лучшими на рынке, то других вариантов для автопроизводителей просто не будет — никто не хочет проигрывать в гонке вооружений, исход которой повлияет на всю индустрию и на много лет вперед.
Вместе с Pegasus также был анонсирован набор инструментов Nvidia Drive IX SDK, дающий доступ ко всем возможностям автопилотируемой платформы компании — с ускорением алгоритмов глубокого обучения и т. п. А для того, чтобы ускорить обучение самоуправляемых автомобилей, можно с успехом использовать серверы на основе суперкомпьютерных решений Nvidia DGX и ускоренного инференса при помощи TensorRT 3, ведь всего лишь восемь систем Nvidia DGX-1 дают возможность симуляции проезда 300 тысяч миль всего за 5 часов (а за два дня можно виртуально проехать вообще все дороги в США).
Сотрудничество с Deutsche Post
Еще одним интересным анонсом европейской конференции GTC 2017 стало объявление начала сотрудничества компании Nvidia с немецкой почтовой службой Deutsche Post DHL Group (DPDHL), которая выбрала автомобильные решения Drive PX для создания в 2018 году тестового парка автономных грузовиков, предназначенных для доставки товаров на этапе «последней мили», которая считается самым сложным и дорогим этапом коммерческой доставки.
В качестве управляющей начинки эти почтовые автомобили будут использовать решение ZF — одного из крупнейших поставщиков автокомпонентов, о котором мы еще поговорим ниже. Электрические грузовики DPDHL будут оснащены системой автопилота ZF ProAI, основанной на платформе Nvidia Drive PX.

Сейчас у DPDHL есть парк из 3400 электромобилей StreetScooter, которые можно оснастить датчиками, камерами, лидарами и радарами компании ZF, и все они будут предоставлять данные для работы электронного мозга ZF ProAI.
С применением алгоритмов искусственного интеллекта, такие автономные автомобили могут воспринимать окружение, планировать свои маршруты и даже следовать им самостоятельно, что снизит себестоимость доставки при сохранении высокой надежности. Немецкая компания оценивает возможности по повышению эффективности таких автоматизированных доставок в 30%.

Искусственный интеллект уже в близком будущем изменит индустрию коммерческих перевозок, и вполне можно ожидать резкого увеличение спроса на автопилотируемый транспорт, подходящий для доставки товаров, который будет использоваться на этапе «последней мили». В Deutsche Post считают, что сенсоры распознавания окружения и система ZF ProAI на базе технологий Nvidia позволит им укрепить свои позиции в сфере перевозок.
Автопилотируемые электрогрузовички будут доставлять товары клиентам в любое время суток, без участия персонала (в будущем) и загрязнения окружающей среды, помогая разгрузить городские дороги. На данный момент автопилот все же требует команд от человека, и управление грузовичком-мулом осуществляется при помощи специального планшета, на котором можно задавать точки назначения и давать автомобилю другие команды, вроде «следовать за мной» и т. п.:

Для ускорения разработки автономного транспорта, компания DPDHL установила в своем вычислительном центре суперкомпьютер Nvidia DGX-1, предназначенный для обучения нейросетей, а в дальнейшем они запустят уже обученные на этом суперкомпьютере модели на автомобилях с платформой Drive PX и системой автопилота ZF ProAI на реальные дороги.
На европейской конференции публике показали прототип такого почтового грузовика — он оснащен шестью камерами, одним радаром и двумя лидарами, которые используются при работе автопилотируемой платформы. А вот внутри кабины не видно ничего особенно интересного, кроме пары больших красных кнопок и экрана системы, работающей на основе Ubuntu:

А теперь пару слов о самом главном — сроках начала работы таких грузовичков и их предполагаемой массовости на раннем этапе. Тестовый парк автономных грузовиков DPDHL составит 300 автомобилей, и их пробное внедрение запланировано уже на следующий год, а официальный запуск уже целого парка из 3000 единиц состоится по плану еще чуть позже, в 2019 году — не успеем и глазом моргнуть.
Автомобили выставки
Так как главной темой европейской конференции GTC были автомобили и технологии искусственного интеллекта для них, то совершенно неудивительно, что главное место в центре конференц-центра Мюнхена заняли именно они. Прямо сразу после входа в интернациональный конференц-центр, зрителям были представлены несколько вариантов легковых автомобилей и других транспортных средств, в том числе и беспилотных.

Конечно, пока что эти самые продвинутые из этих автомобилей соответствуют лишь 3 и 4 уровням автономности, как максимум, а для большего мы ждем Pegasus. Так что посетителям европейской конференции GTC 2017 пока что посчастливилось полюбоваться несколько менее продвинутыми автомобилями, каждый из которых все же по-своему интересен и в чем-то уникален. Пожалуй, самым необычным автомобилем выставки стал Roborace Robocar, имеющий ливрею из фирменных цветов Nvidia и соответствующих логотипов на ней:

Этот гоночный болид футуристичного вида может разгоняться более чем до 300 км/ч, он имеет четыре электромотора (по одному на каждое колесо) мощностью по 300 кВт, 15 различных датчиков, а его электронное сердце основано на все той же платформе Nvidia Drive PX. На сегодня существует два прототипа этой модели, которые тестируют на гоночных трассах во время соревнований электрической Формулы Е. В будущем же планируется запуск гоночной серии, и старт первой гонки предполагается в декабре 2017 в Гонконге. Все команды гоночной серии получат по два одинаковых болида, но будут использовать собственные алгоритмы искусственного интеллекта, в чем и заключается главная интрига чемпионата.
Если говорить о личном мнении, то автору кажется, что тема гонок автопилотов (роботов) в принципе довольно спорная. Без ярких личностей и риска для их здоровья и жизни, интерес к подобному автоспорту трудно представить, ведь люди сейчас болеют за людей, а не за роботов. Робогонки же кажутся скорее похожими на тараканьи бега, где нет личностей, ну и также они чем-то похожи на лошадиные скачки — вот для ставок их вполне можно использовать, но как традиционный автоспорт — весьма сомнительно.
Хотя на начальной стадии разработки автопилотов тема робогонок весьма важна и вполне может быть интересной уже даже только из-за одной новизны. Плюс к этому, такие соревнования подстегивают технологическое соперничество разных компаний, которые будут стараться сделать лучший гоночный автопилот. Но яркое будущее таких гонок представить сложно, если честно. Разве что если «очеловечить» как-то каждого робота, создав из них виртуальные личности, но чем они тогда будут отличаться от живых людей?

Еще одним экспонатом, привлекшим к себе внимание практически всех посетителей, стал концепт-кар Mercedes-Benz Concept IAA. Хотя этот экспериментальный прототип и не является автопилотируемым, но при его создании активно использовались компьютерные технологии, да и работа футуристичной цифровой приборной панели основана на технологиях компании Nvidia.

Но еще больше прототип компании Mercedes-Benz интересен из-за его аэродинамического совершенства. Это четырехдверное купе, премьера которого прошла в 2015 году на Франкфуртском автосалоне, имеет коэффициент аэродинамического сопротивления всего лишь 0,19, что очень хорошо для полноценного легкового автомобиля.
Еще любопытнее то, что такой коэффициент достигается лишь при условии активации специального аэродинамического обвеса. У этой машины активная аэродинамика, когда в зависимости от достигнутой скорости, аэродинамические элементы (закрылки в переднем и заднем бамперах) меняют свое положение, обеспечивая более совершенную аэродинамику.

Concept IAA имеет каплевидный дизайн, вытянутый капот, мощные воздухозаборники, удлиненную заднюю часть, малый дорожный просвет (всего 100 мм — для нашей страны вряд ли подойдет) и плоское днище. При достижении скорости более чем 80 км/ч автомобиль переключается в «аэродинамический режим», когда в задней части выдвигаются специальные щитки почти на 40 см. Также аэродинамические щитки выезжают по бокам переднего бампера, оптимизируя воздушные потоки. Спойлер переднего бампера отъезжает назад, а в решетке радиатора закрываются отверстия. Даже внутренняя часть колесных дисков смещается, придавая колесам плоскую форму.
Выглядит это впечатляюще, но до воплощения концепта в реальность еще далеко. Тем же посетителям выставки, кто заинтересован в уже продающихся автомобилях, было интересно посмотреть на модели Tesla Model X и Audi A8L 3.0 Quattro, стоящие напротив друг друга. При этом у кроссовера Tesla можно было открывать двери и изучать интерьер автомобиля. В рамках материала для нас больше всего интересно то, что автомобили компании Tesla Motors оснащены платформой Drive PX с автопилотом второго поколения уровня 2 и 2.5 (почти третьего).

Пожалуй, еще интереснее был Audi A8L, который в следующем году станет первым коммерчески доступным автомобилем с автопилотом третьего уровня автономности. Эта машина в топовой комплектации оснащена аж шестью процессорами Nvidia, которые обеспечивают работу автопилота Traffic Jam Pilot, работу и графику виртуального кокпита, информационно-развлекательную систему и планшеты, предназначенные для задних пассажиров.
Посетители европейской конференции GTC в Мюнхене смогли одними из первых увидеть этот автомобиль воочию, и самые обеспеченные и заинтересованные из них уже совсем скоро смогут получить возможности автопилота Traffic Jam Pilot в повседневной жизни, приобретя этот шикарный седан представительского класса.

Но не только легковые и гоночные автомобили интересуют публику. В ближайшие годы ожидается всплеск интереса к различным вариантам транспортных средств, предназначенных для общественного транспорта, вроде самопилотируемых автобусов и микроавтобусов.
Таких, как электрический шаттл e.GO Mover, который скрывает внутри себя уже известный нам автопилот ZF ProAI, основанный на платформе Drive PX 2. Запуск тестового флота шаттлов запланирован уже на середину следующего года.

e.GO Mover способен работать до 10 часов, перевозя до 15 пассажиров (имеется 9 сидячих мест и 6 стоячих), и к 2021 году должен будет получить автопилот уже четвертого уровня автономности. Скорее всего, он будет основан на сравнительно компактном решении, вроде Drive PX, ну а пока что исследования и разработки проводятся при помощи несколько большего комплекта оборудования, установленного рядом с водительским местом:

Именно для замены кучи электроники на компактный вариант Drive PX и необходимы мощные платформы, вроде Pegasus. Правда, есть большая вероятность, что первым эту новую версию автомобильного компьютера Nvidia поставит в собственный тестовый автомобиль компании — BB8, без которого не обходится ни одно мероприятие компании, посвященное автомобилям.
На данный момент уровень системы автопилотирования BB8 соответствует уровню 3 и по части функций соответствует уровню 4, как сообщил нам Danny Shapiro — глава автомобильного подразделения в Nvidia, занимающегося искусственным интеллектом для самопилотируемых автомобилей. Никто не удивится, если именно этот автомобиль станет одним из первых прототипов, соответствующих уровню 5, но конкурентов у него много.

Шесть таких автомобилей уже ездят по улицам пары штатов США (Калифорнии и Нью-Джерси), а также Германии — в рамках исследовательского проекта компании. Модель BB8 помогает Nvidia тщательно протестировать все этапы работы их собственной платформы автономного вождения, но предлагать готовое решение они не планируют, оставляя возможности по разработке основной части ПО своим партнерам.
Кроме основных экспонатов, расположенных в центре выставки, там были и не столь заметные, но не менее интересные транспортные средства. В частности — готовый прототип мини-автомобиля, предназначенный для разработки автопилотируемого ПО, и предлагающий всю аппаратную начинку для этого. StreetDrone One сделан на основе Renault Twizy — маленького двуместного электромобиля, чем-то похожего на большой квадроцикл с крышей. Он способен проезжать до 56 км с максимальной скоростью в 80 км/ч, а батарея полностью заряжается за 3.5 часа.

StreetDrone ONE — это полностью электрический автомобиль, обеспечивающий возможность разработки ПО для автопилотирования и отлично подходящий для образовательных и технологических компаний, не желающих тратить время и деньги на разработку механических и электронных частей автопилотируемого транспорта, а планирующих сразу же заниматься исключительно разработкой и отладкой программного обеспечения.

При этом заказчикам не обязательно ограничиваться стандартной комплектацией, в которую входит полноценный набор управления при помощи сервоприводов (drive-by-wire) с использованием CAN-шины, платформа Nvidia Drive PX 2 в варианте из двух GPU, семь HD-камер, твердотельных накопителей емкостью 4 ТБ для хранения данных телеметрии и возможности подключения к 4G-сетям. Для самых продвинутых возможна установка радаров и лидаров с соответствующей наладкой оборудования.
Электрический мини-автомобиль имеет уникальный корпус, разработанный и изготовленный для этого проекта и имеющий специальные места для установки различных датчиков: камер, радаров и лидаров. Так, плоская площадка на крыше предназначена для надежного монтажа лидаров и камер с 360-градусным обзором, такое решение обеспечивает минимальное количество вибраций.

Поставка StreetDrone One будет доступна для заказчиков, начиная с ноября 2017 года, цена решения начинается от 56 000 фунтов стерлингов (плюс ежемесячная плата за техподдержку при желании). Такая стоимость может кому-то показаться слишком высокой, при меньшей цене на современные автомобили, но ведь это — полноценная готовая платформа для разработки автопилотируемого ПО, в котором уже есть вся необходимая механика и электроника. И для экономии времени на разработку автопилота такая машинка вполне подойдет.
Демонстрационные заезды
Выставочная часть конференции GTC не была бы полной без демонстрационных заездов автопилотируемых автомобилей. Если на предыдущих мероприятиях Nvidia чаще всего показывали собственный BB8, то в Мюнхене решили представить другие варианты. Первой и, пожалуй, самой любопытной стала демонстрация некоторых возможностей того самого почтового грузовичка Deutsche Post DHL, о котором мы рассказали в нашем материале.
Применение таких автопилотируемых транспортных средств, помогающих в доставке товаров к клиентам, должно начаться в 2018 году, и это — лишь одна из первых ласточек среди подобных решений. Электрогрузовички Deutsche Post DHL StreetScooter с системой автопилотирования ZF ProAI планируется применять на отрезке «последней мили» — прямо до дверей клиента, что должно упростить и удешевить процесс.
Вот так выглядела демонстрация лишь некоторых возможностей «почтового» автопилота, находящихся на раннем этапе разработки — грузовик способен повиноваться приказам водителя, самостоятельно следуя за почтальоном или отправляясь по приказу со специального планшета туда, где он нужен:
Грузовички DPDHL оборудованы несколькими сенсорами, включая камеры, радары и лидары, и довольно легко справлялись с трассой на европейской GTC 2017, распознавая окружение и планируя безопасный маршрут. На видео хорошо заметно выполнение команд от условного почтового работника, и полностью самостоятельное передвижение грузовичка по команде (человек, сидящий на правом сиденье — всего лишь наблюдатель, не выполняющий функциональной нагрузки). Также было продемонстрировано не простое следование маршруту, но и отслеживание и пропуск пешеходов.
Кроме этого, ближе к концу ролика показан демонстрационный экран со второго грузовичка, на котором отображаются как данные с лидаров (их на грузовичке установлено два), так и с камер — с отметкой определенных объектов в виде пешеходов. Из дополнительных развлечений была визуализация данных, полученных с лидаров, отрисованных в виртуальном пространстве и просматриваемых при помощи VR-шлема.

Вторым автопилотируемым транспортным средством, представленным в демо-зоне, стал прототип легкового автомобиля Virtual Vehicle, который был интересен тем, что на нем возили всех желающих (по очереди, отдавая предпочтение прессе), рассказывая о своих решениях. Компания Virtual Vehicle занимается разработками в сфере автомобилей будущего и этим летом они стали первой организацией, которая начала тесты автономных автомобилей на дорогах общего пользования в Австрии.

Автопилот Virtual Vehicle, находящийся в стадии разработки, также использует платформу Nvidia Drive PX для распознавания объектов и окружения, а также планирования безопасного маршрута. Целью этого проекта самопилотируемого автомобиля является создание открытой платформы для партнеров компании, которые смогут добавить свои собственные сенсоры и подобрать вычислительные алгоритмы для специализации автопилотируемых машин под какие-то конкретные задачи.

Автору материала удалось прокатиться на этом автопилотируемом автомобиле, и в процессе заезда открылись любопытные подробности. Главное, что весьма положительно, это был самый «живой» автопилот из виденных мной до сих пор — он разгонялся весьма бодро, чего обычно не делают для демо-заездов, во избежание различных проблем. Но в случае Virtual Vehicle практически все опробовавшие его отметили хорошую динамику, в первую очередь.
Правда, не обошлось тут и без ложечки дегтя. Оказывается, в столь стесненных рамках очень узкой «тропинки», огороженной металлическим забором, от установленных на демонстрационный автомобиль радаров было мало толку, так как они рассчитаны на улицы и трассы, поэтому автопилот перевели в режим простого следования по маршруту по GPS-сигналу. Так что от условий реальных автодорог эта демонстрация была довольно далека, и многие возможности, вроде экстренного торможения при появлении пешеходов в опасной зоне, на демо-треке просто не работали.
Но создатели уверяют, что как на обычных дорогах, так и на гоночной трассе в Австрии (видимо, речь о Ред Булл Ринг в Шпильберге) все работает как надо, и автопилот отлично показал себя на скоростях до 120 км/ч. В будущем планируется добавить к установленным радарам еще и лидары, и вот тогда автопилот будет отрабатывать объекты даже на очень небольшом расстоянии. Увы, но видеокамеры тут не помогают, так как пока что софт поддерживает только обычные 2D-камеры без возможности получения информации о глубине.
Были на GTC Europe и другие демо-заезды. Со стороны гоночных энтузиастов были представлены три команды студенческой формулы Formula Student: KA RaceIng, Greenteam Stuttgart и Schanzer Racing, которые показали свои маленькие гоночные болиды с автопилотами. Эти команды собрали свои самопилотируемые системы также на основе Nvidia Drive PX и они выступают в международных соревнованиях.
Посетители конференции могли наблюдать полностью автономное прохождение импровизированной гоночной трассы болидом KA RaceIng, который хоть иногда и сбивал установленные на ней ограничивающие конусы, но очень старался этого не делать.

Вот такой набор «живых» демонстраций присутствовал на европейской GTC — и многие зрители, включая автора, смогли получить первые впечатления о том, как на данный момент работают действительно самобеглые коляски различного предназначения: от спортивных болидов до почтовых грузовичков. Пока что все это выглядит местами несколько сыровато, но для текущей стадии разработки вполне достойно.
Выступление компании Яндекс
Не могли мы обойти вниманием и одно из немногих выступлений российских компаний на мюнхенской конференции. Тем более, что это была сессия, пожалуй, самой главной IT-компании в России, да еще и имеющей свой собственный сервис такси, который явно был бы не против перевода парка автомобилей на роботизированные варианты.
Конечно же, речь о Яндекс, которую представлял Антон Слесарев, ведущий специалист по машинному зрению в компании. На майской конференции в Калифорнии Яндекс (в лице все того же Антона) уже представлял свои разработки по теме автопилотирования, а также показывал соответствующий видеоролик с обучением автопилотируемого автомобиля. Этот рассказ и был продолжен в Германии.

Так как выступление в основном было предназначено для массовой публики не из нашей страны, то немалую его часть выступающий потратил на разъяснение роли Яндекса в России и краткого описания многочисленных сервисов, предлагаемых компанией. Нам это не слишком сильно интересно по понятным причинам, а вот из любопытных тем мы можем отметить возможность получения помощи в процессе обучении автопилота от обычных пользователей.

Именно так — пользователи сервиса Яндекс.Толока, который помогает выполнять задания по анализу и оценке контента, в числе других задач могут получать и задания по описанию объектов, определенных компьютером на изображении. Например, на фото помечены объекты, которые смог определить искусственный интеллект, но для применения этих данных в деле требуется точно знать, что это за объекты, чтобы обучить ИИ по массе таких определений человеком. Который, в свою очередь, получит за такую работу небольшую денежку.

На основе этих данных обучается нейросеть при помощи ускоренных на GPU алгоритмов. То же самое относится и к данным от лидаров, в которых для ИИ еще сложнее отделить объекты и правильно их определить (дерево, автомобиль, зданий, пешеход и т. п.). Этим также могут заниматься толокеры за долю малую.
Таким образом, у Яндекса получается снизить себестоимость процесса обучения искусственного интеллекта автопилота, ведь при помощи упомянутого выше сервиса можно найти недорогую и достаточно качественную рабочую силу, которая поможет искусственному интеллекту научиться.
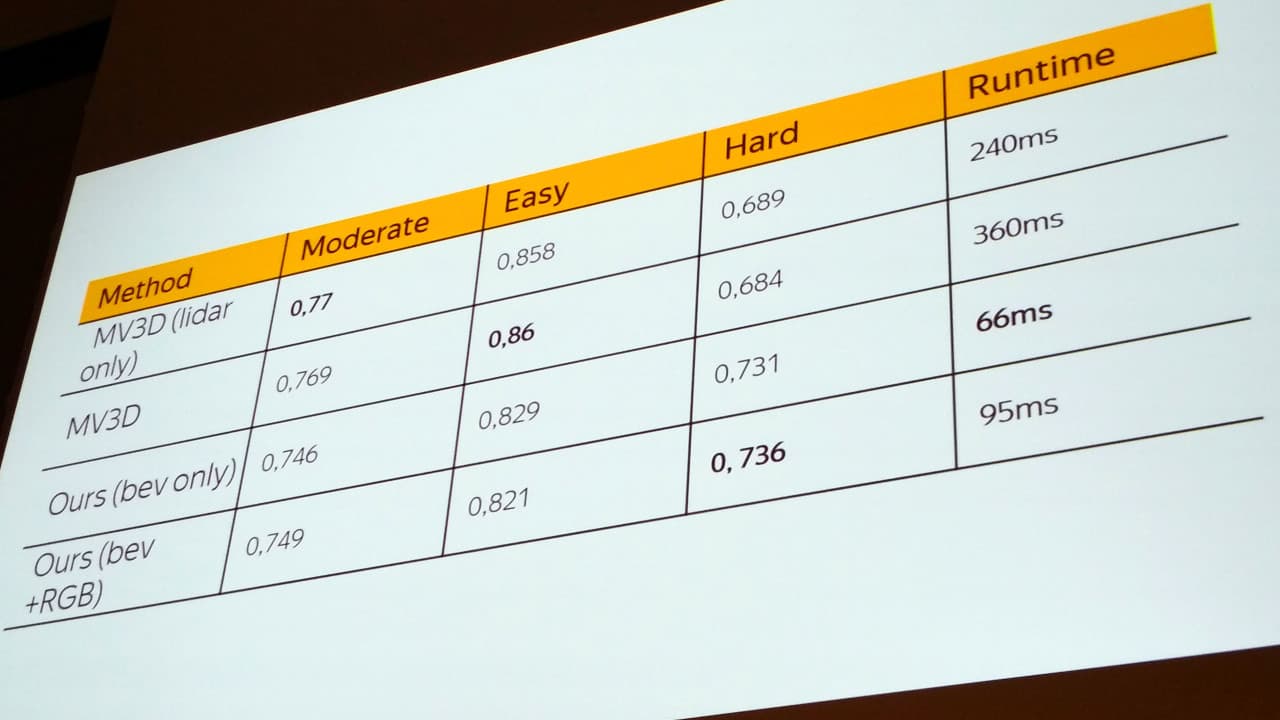
Но не одной Толокой отличился Яндекс на GTC. Они продемонстрировали показатели скорости собственных алгоритмов определения объектов на основе данных с лидаров и камер, по сравнению с известным фреймворком Multi-View 3D networks (MV3D), который специализируется на аналогичных задачах. Как видите по таблице, у решений Яндекса наблюдается явное преимущество по скорости распознавания при сохранении приемлемой точности.

Пожалуй, самым интересным стал слайд с планами компании на будущее, который предвещает публичное тестирование автопилотируемых автомобилей на дорогах общего пользования — в России, что самое интересное. Вероятно, процесс внесения изменений в законодательство уже начат, иначе они не обещали бы как минимум десяток тестовых самоуправляемых транспортных средств на дорогах нашей страны (наверняка Москвы) в 2018 году. Также в Яндексе планируют установить на автомобили большее количество различных сенсоров с расширением набора алгоритмов и экспериментов.
После выступления на Антона буквально напали присутствующие русскоязычные журналисты, которым не удается получить толковые комментарии Яндекса по теме разработок автопилотирования в России. Понять компанию можно, ведь они начали заниматься темой не так уж давно, и до появления каких-то реально больших успехов публике рассказывать особенно нечего. Учитывая то, что каждая, даже небольшая неудача может быть раздута до огромной проблемы, а успех воспримут как само собой разумеющееся при столь сильной конкуренции в этой сфере.
Интересно, что вот у Nvidia то реальных конкурентов по программно-аппаратным платформам а-ля Drive PX, по сути, практически нет — предложения калифорнийской компании уникальные. Хотя в прототипах своих автомобилей Яндекс пока что использует обычные GPU Nvidia, известные по настольным решениям, но они также заинтересованы и в Drive PX и (особенно!) в Pegasus. Разработчик из Яндекса утверждает, что производительности текущих решений для полноценного автопилота высокого уровня им уже не хватает, и они очень ждут, когда Pegasus попадет к ним в руки.
Стенд компании ZF
Не обошлось и без интересных стендов, связанных с автомобилями, и в выставочной части мюнхенского конференц-центра. О некоторых из них мы уже написали, а одним из самых обширных и интересных нам показался стенд компании ZF — одного из крупнейших и известнейших в мире поставщиков оборудования для автомобильной промышленности, причем связанных далеко не только с темой автопилотирования.

ZF является мировым лидером по производству приводов и элементов подвески, систем активной и пассивной безопасности и многого другого, и кое-что из этого списка было представлено в Европе на GTC. На стенде немецкой компании публике показали многочисленные решения, позволяющие использовать управление автомобилями при помощи автопилота.

К примеру, ZF выставила на своем стенде целый макет подвески со всеми тягами и рычагами, а также элементами управления автомобилем при помощи систем drive-by-wire, требующих дополнительного аппаратного обеспечения и часто использующихся в системах самопилотируемых автомобилей. Также рядом были продемонстрированы и многочисленные сенсоры: радары, лидары и камеры в различных исполнениях: одиночные, стерео и т. п.

Все это обычно управляется при помощи сердца системы автопилотирования — уже не раз упоминавшегося в тексте суперкомпьютерного электронного блока управления ZF ProAI, основанного на платформе Nvidia Drive PX и применяющегося в автономных транспортных средствах DPDHL и e.GO. Понятно, что прозрачным корпус блока сделан исключительно ради демонстрационных целей, а в реальности он выполняет в том числе роль охлаждения.

Ну и никак нельзя было обойтись без демонстрации возможностей средств автопилота, разработанных компанией совместно с партнерами. Так, на фото показан демо-вариант решения на основе Drive PX 2, умеющий определять и отслеживать дорожные знаки и разметку, а также статичные и динамические объекты. В целом, в этой функциональности нет ничего нового, было бы куда интереснее посмотреть на несколько более продвинутые возможности.
Заключение
Тема автопилотирования и особенно полностью самоуправляемых роботакси, которые должны появиться в не столь уж далеком будущем, весьма интересна и простым обывателям и индустриальным экспертам. Полностью автономные транспортные средства, обходящиеся без участия человека, совершат революцию в транспорте, изменив его привычный вид раз и навсегда. Представьте себе роботакси, которое вызывается при помощи смартфона. К примеру, в приложении указываешь пункт назначения и все — такси без водителя приезжает, впускает пассажиров и отвозит их туда, куда указано. Без участия человека в принципе! Думается, что очень многие люди в таком будущем откажутся от личного транспорта вообще, ведь подобные такси удобнее, безопаснее и эффективнее (дешевле).
Полноценным автопилотам можно сходу придумать целую кучу применений. Например, прогулочная машина для туристов — небольшой роботизированный кабриолет без места водителя, который передвигается по известным туристическим маршрутам, не имеет крыши вовсе (кабриолет) или оснащен прозрачной панорамной крышей, через которую хорошо видны все достопримечательности. Или транспорт, используемый в аэропортах — заправщики, буксировщики, перронные автобусы и микроавтобусы. Или шаттлы для перевозки людей по студенческому городку. Таких примеров в голову приходит масса, и поэтому автопилоты нужно разрабатывать уже сейчас, чтобы не опоздать. Независимые разработчики вполне могут взять за основу решение Nvidia — платформу Drive PX, или даже полноценные системы для разработки на ее основе, вроде упомянутых в материале. Даже нынешние версии Drive PX весьма хороши, а уж Pegasus и вовсе способна стать одним из первых решений, достигших максимального уровня автономности, и это — отличная возможность для Nvidia.
Для автора материала окончание конференции GTC 2017 Europe, посвященной искусственному интеллекту и автономным автомобилям, получилось весьма символичным — дорога в аэропорт была на машине с зачатками автопилотирования в виде BMW 730Ld. Водитель с удовольствием пользовался возможностями самостоятельного движения своего автомобиля на шоссе и в пробках, благодаря отличным немецким дорогам с хорошо различимой разметкой и разделительными полосами. Меня так и подмывало спросить, чем водитель планирует зарабатывать через ...надцать лет, но я все же сдержал себя — на пути домой больше всего хотелось спокойствия.

Зато подобный разговор получился уже в России — с водителем такси Gett уже на куда более скромной корейской машине бюджетного уровня. Мне повезло, что собеседник имел техническое образование (да еще и по автомобильной теме), проявил немалые знания по вопросам организации таксопарков, и в конце концов даже высказался за роботизированные автомобили и хотел бы их скорейшего внедрения, как пользователь. Вероятно, как водитель он не против прогресса лишь потому, что ему есть чем заниматься и без вождения такси, а вот что будут делать все остальные — хороший вопрос. О котором им стоило бы задуматься еще вчера.
Но это — тема для отдельного разговора, а с технической точки зрения прогресс идет в том числе благодаря компании Nvidia, вот уже несколько лет предоставляющей одну из лучших платформ для создания систем автопилотирования — Drive PX. А уж что будет, когда появится ее следующее поколение под кодовым именем Pegasus — на горизонте пока что не видно конкурентов в принципе, а на параллельных вычислениях и глубоком обучении в Nvidia собаку съели, как говорится.
Мы и дальше будем наблюдать за успехами Nvidia на поприще создания аппаратных и программных средств для применения в автопилотируемых автомобилях, ведь для них это — хороший шанс закрепиться на очень большом и жирном рынке, который раньше вообще никак к ним не относился. Но это ведь давно уже далеко не та компания, которая разрабатывает исключительно игровые графические процессоры...
Если у вас остались какие-то вопросы по GTC 2017 Europe или вы хотите ознакомиться с выступлениями, представленными на европейской конференции Nvidia по вычислительным технологиям, то вы сможете найти их на сайте конференции.


