Проект роботов с самосознанием: роль проприоцепции в развитии искусственного интеллекта
Мы, люди, не задумываемся о том, как мы чувствуем свое тело и его положение в пространстве. Это врожденное умение, которое называется проприоцепцией, или внутренним чувством. Оно помогает нам ходить, бегать, прыгать, танцевать и делать множество других действий, не глядя на свои конечности. Но что, если мы могли бы передать это умение роботам? Как бы это изменило их поведение и возможности?

Два немецких ученых из Мюнхенского института робототехники и машинного интеллекта (MIRMI) решили выяснить это на практике. Они провели эксперимент, в котором обучили роботов чувствовать свое тело с помощью инструментов машинного обучения. Результаты эксперимента были опубликованы в журнале Science Robotics.
Для этого они оснастили роботов датчиками, передающими информацию о состоянии каждой отдельной части тела робота. К примеру, датчики показывали положение колена робота, сторону в которую оно сгибается и насколько сильно оно сгибается в текущий момент времени. Эти данные затем поступали в центральный процессор робота, который при помощи алгоритмов машинного обучения создавал модель своего тела и его возможностей.
Дополнительно ученые показали, что роботы способны изучать свое тело без заранее известных данных. Для этого они использовали метод, который они назвали «моторным бормотанием». Это означает, что робот случайным образом включал все свои двигатели, чтобы почувствовать, как они работают и как они влияют на его положение. Таким образом, робот формировал базовое представление о своем теле, которое затем уточнялось и улучшалось благодаря инструментам машинного обучения.
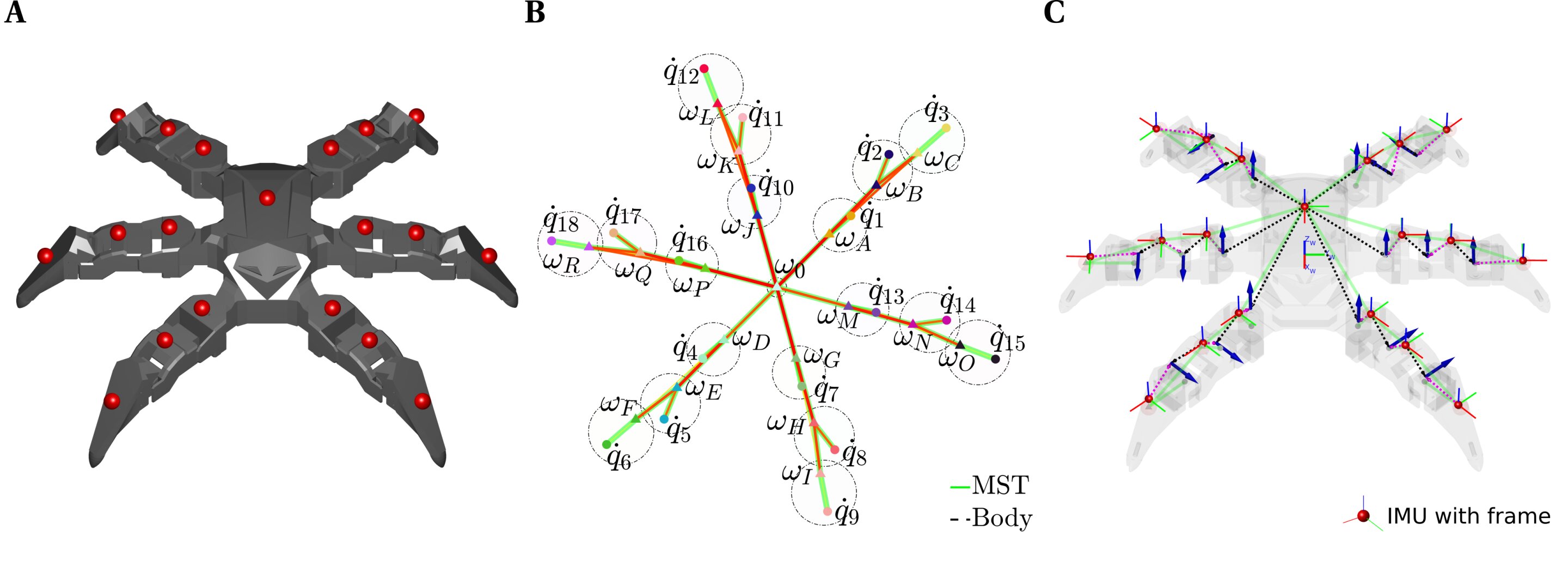
При проверке свего подхода на разных типах роботов, среди которых был шестиногий паукообразный робот, гуманоид и робо-рука. Было выявлено, что такой подход позволил всем типам роботов построить некоторую модель своего тела по частям, а так же модель работы всех деталей вместе.
Это исследование имеет большое значение для развития робототехники, так как проприоцепция является важным фактором для эффективного и безопасного взаимодействия роботов с окружающей средой и людьми. Роботы, которые осознают свое тело, могут лучше адаптироваться к различным ситуациям, избегать столкновений и повреждений, а также выполнять более сложные и творческие задачи.











1 комментарий
в итоге получаем универсального трансформера, который формирует свою структуру под конкретные задачи, используя доступные отдельные (условно автономные) элементы.
кожаный мешок, как источник задач, со временем исключится из условия.
Добавить комментарий