Из LEGO собрали робо-руку, которая работает как человеческая: как работают «мягкие синергии» в робототехнике?
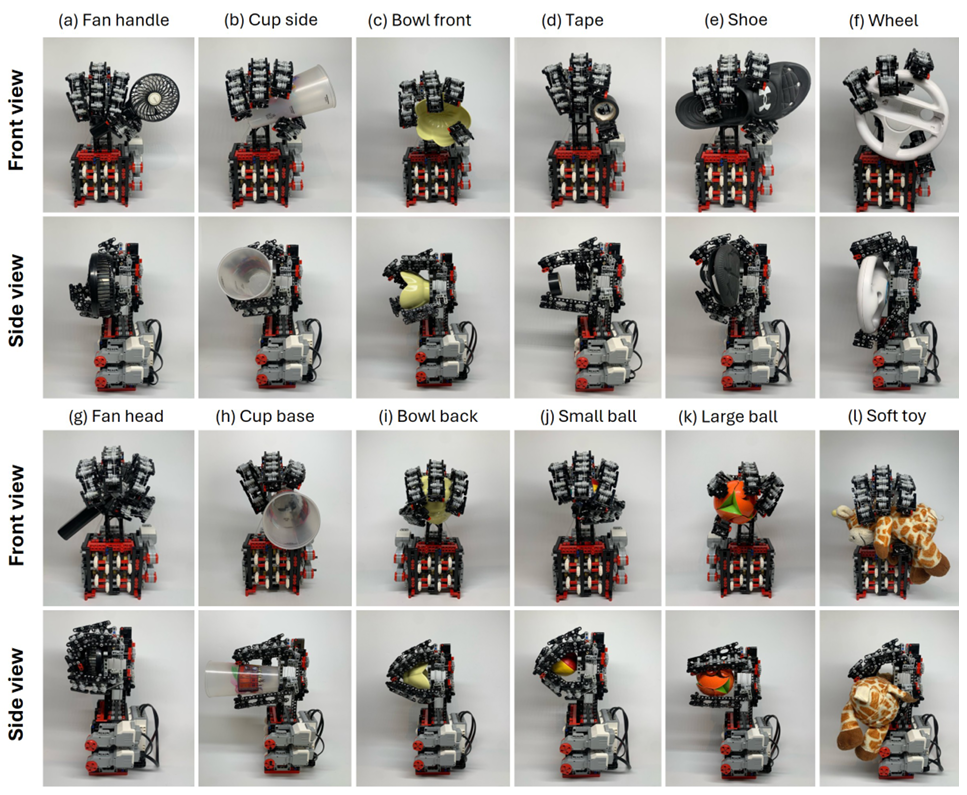
Кто из нас не развлекался, собирая LEGO? Кипа разноцветных кубиков, инструкции, часы сборки, и вот уже на столе красуется космический корабль из Звёздных войн, или замок Хогвартс, или… роботизированная рука, воплощающая в себе передовые идеи современной робототехники, способная адаптивно обхватывать предметы разной формы — от ручки веера до мягкой игрушки.
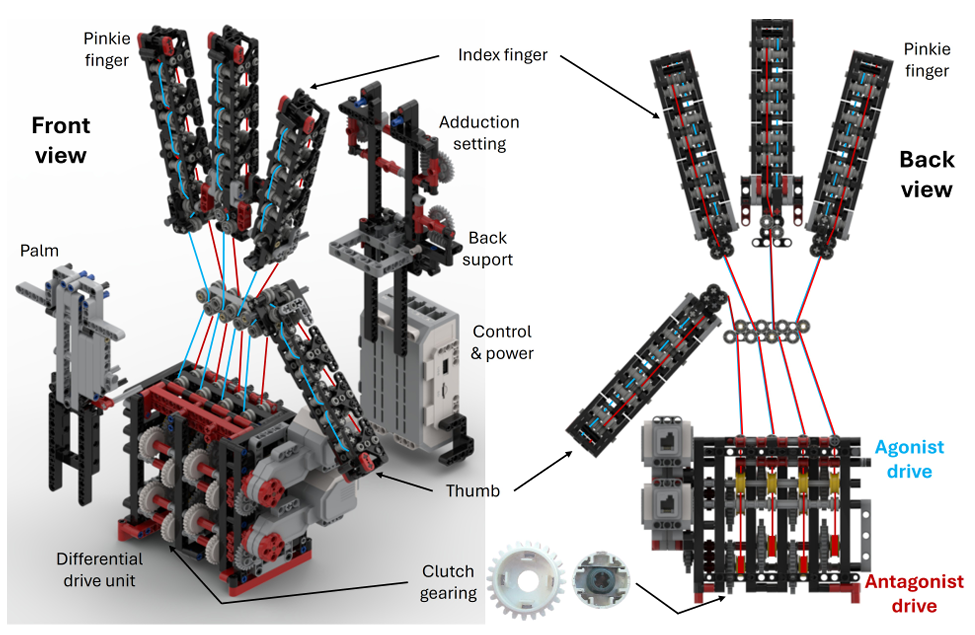
Нет, речь не про новый набор, а про проект инженеров из Бристольской робототехнической лаборатории. Они создали Educational SoftHand-A — антропоморфную, то есть человекоподобную, руку, построенную исключительно из деталей LEGO Mindstorms.

Этот проект делает видимыми и понятными фундаментальные принципы, которые будут определять развитие роботов в ближайшие десятилетия. И так, какую же инженерную мысль смогли реализовать с помощью такой детской, на первый взгляд, забавы?
Проблема управления: почему рука — это не просто набор моторчиков?
Человеческая рука — чудо инженерной мысли природы. Десятки мышц и суставов работают в идеальной синхронизации, позволяя нам выполнять как силовые, так и тонкие ювелирные задачи. Попытка скопировать эту конструкцию «в лоб» — поставить отдельный мотор на каждый сустав — приводит к созданию очень громоздких, дорогих и энергозатратных механизмов. А программирование их скоординированного движения превращается в задачу огромной вычислительной трудности.
Современная робототехника ищет пути попроще. Один из них основан на принципе, который можно увидеть в работе самой природы. Этот принцип называется недоактуацией (underactuation) — когда количество степеней свободы (например, суставов) значительно превышает количество моторов. У руки из LEGO 12 суставов, но всего два мотора.
Как это реализовать?
Ответ природы: мягкие синергии
Ключевая идея — «мягкие синергии». Давайте разберем этот термин.
Синергия — это совместное, скоординированное действие. Когда вы берете стакан, ваши пальцы действуют как единая система, с заранее определенной общей целью. Роботы тоже могут этому научиться.
Мягкость в данном контексте означает пассивную адаптивность. Рука человека обхватывает предмет, и каждый палец останавливается ровно в тот момент, когда касается поверхности. Ему не нужна отдельная команда «стоп». Он просто реагирует на физический контакт.
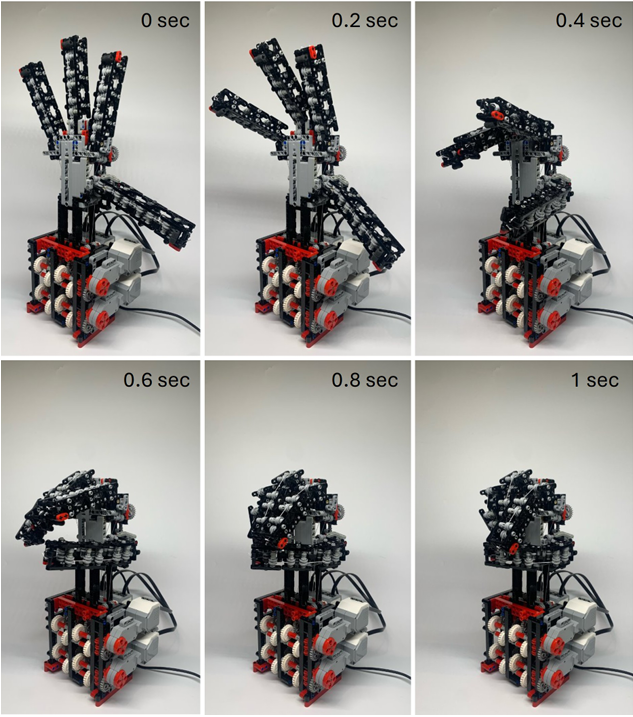
Educational SoftHand-A имитирует это поведение. Все четыре пальца приводятся в движение единой системой сухожилий — прочных нитей, наматываемых на катушки моторами. Один мотор отвечает за сгибание (закрытие ладони), второй — за разгибание. Но как заставить пальцы двигаться согласованно, но при этом независимо останавливаться?
Каждая катушка для сухожилия соединена с общим валом не напрямую, а через специальную шестерню с муфтой сцепления. Эта шестерня передает крутящий момент до определенного предела. Как только палец упирается в объект и нагрузка на его сухожилие превышает этот порог, шестерня начинает проскальзывать. При этом остальные пальцы, которые еще не встретили препятствия, продолжают свое движение.
В результате рука естественно обхватывает объект любой формы, не требуя для этого сложного программного обеспечения или десятков датчиков. В этом и заключается суть адаптивного захвата.
Анатомия из пластика: как это устроено?
Конструкция руки продумана до мелочей, несмотря на ограничения материала.
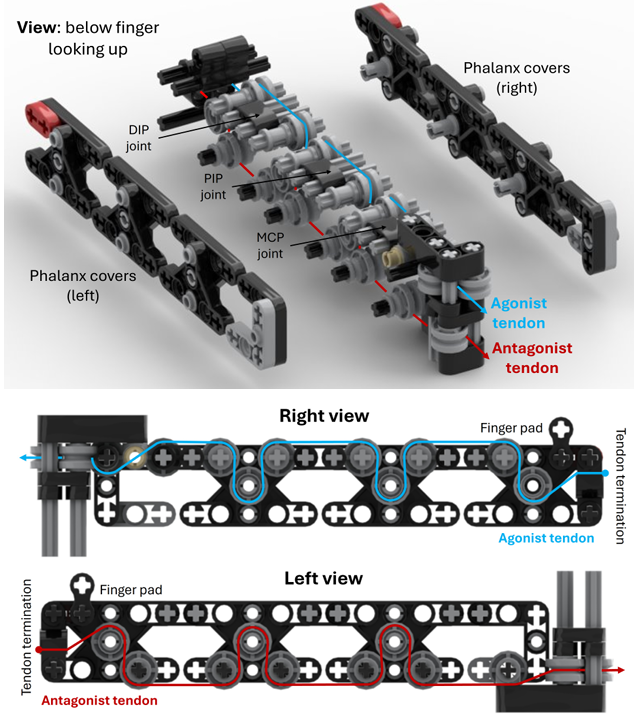
- Четыре модульных пальца. Все пальцы имеют одинаковое строение, что упрощает сборку. У каждого по три сустава, как у человеческого.
- Двойная система сухожилий. На каждый палец идут два «сухожилия». Первое, агонист, отвечает за сгибание. Второе, антагонист, — за активное разгибание. Такая схема гораздо эффективнее, чем пассивное разгибание с помощью пружин или резинок, так как обеспечивает точный контроль и лучшее усилие.
- Продуманная механика. Чтобы нити-сухожилия двигались с минимальным трением, в конструкции задействовано более 100 миниатюрных пластиковых подшипников, тоже из набора LEGO.
Вся система управляется стандартным программируемым блоком LEGO Mindstorms EV3. Идея проекта — не использовать никаких сторонних компонентов.
Работает ли это на самом деле?
На бумаге то всё работает, но каковы результаты реальных испытаний? Исследователи провели серию тестов, сравнивая руку из LEGO с напечатанной на 3D-принтере моделью SoftHand-A, где применяются более прочные материалы и металлические подшипники.
Версия из деталек медленнее (время сжатия и разжатия около 1 секунды против 0,5 секунды у 3D-модели) и развивает меньшее усилие (около 5-6 Ньютонов против 7-8). Основная причина — большее трение в пластиковых деталях и менее мощные моторы.
Тем не менее, рука из LEGO хорошо демонстрирует главный принцип — адаптивный захват. Она успешно справляется с объектами разной формы, веса и текстуры. Пальцы самостоятельно находят нужное положение, обеспечивая надежный хват. Это доказывает, что сама механическая концепция верна и работает даже при таких серьезных материальных ограничениях.
Реальность инженерии: о ценности компромиссов
Так что, перед нами идеальная роботизированная рука? Нет. Этот проект стоит рассматривать, скорее, как рассказ об искусстве инженерного компромисса.
Первое, с чем столкнулись создатели — это физические ограничения материала. Рука из LEGO предсказуемо медленнее и слабее своего 3D-печатного аналога. Причина проста и неумолима: сотни пластиковых подшипников создают куда большее трение, чем их металлические аналоги, а стандартные игрушечные моторы маломощны.
Тут есть и более тонкий компромисс. В оригинальных конструкциях SoftHand адаптивность отчасти обеспечивается пружинами, которые держат сухожилия в постоянном натяжении. Здесь же их заменили шестернями с муфтой сцепления. Решение, конечно, хитрое, но у него есть побочный эффект. Что происходит, когда в системе нет постоянного натяжения? Появляется люфт. Небольшая, но ощутимая слабина в сухожилиях, которая снижает скорость реакции и общую точность движений.
Хочу ли я сказать, что проект неудачный? Совсем наоборот. Это хороший стресс-тест для самой идеи адаптивного захвата. Он доказывает, что заложенные в нее механические принципы достаточно надежны, чтобы работать даже в таких кустарных условиях, когда конструкция собрана из детской игрушки, с ее люфтами, трением и низкой мощностью.
В этом и есть гений инженеров — находить функциональные решения в мире, полном ограничений.
Источник: arXiv











0 комментариев
Добавить комментарий