Летающий шар Камова: почему уникальный сферический беспилотник так и не пошёл в серию
В конце 1990-х годов среди новых проектов беспилотной авиатехники появился аппарат, который сразу обращал на себя внимание нестандартным внешним видом. Речь идёт о Ка-137, разработанном в ОКБ Камова. Сферический корпус, пара соосных винтов и четыре тонкие стойки шасси делали его похожим на шар, свободно парящий в воздухе. Этот проект стал одним из примеров того, как накопленный опыт создания пилотируемых соосных вертолётов пытались перенести на беспилотные платформы.
История создания
Работы над Ка-137 стартовали в середине 1990-х годов в Опытном конструкторском бюро имени Н. И. Камова. В то время предприятие переживало период сокращения заказов на традиционную технику и активно искало новые ниши. Проект возглавлял главный конструктор Сергей Михеев. Аппарат получил обозначение МБВК-137 — многоцелевой беспилотный вертолётный комплекс — и позиционировался как универсальная платформа для установки самого разного оборудования.

Первый полёт прототипа состоялся в 1998 году. К началу 2000-х годов было изготовлено несколько опытных образцов. Разработка велась с расчётом на использование как в интересах Министерства обороны, так и гражданских структур, прежде всего МЧС. Ранее Камов уже имел опыт создания беспилотного вертолёта Ка-37 совместно с южнокорейской фирмой Daewoo, однако Ка-137 стал полностью самостоятельной российской машиной с принципиально новой сферической компоновкой.
Конструкция аппарата
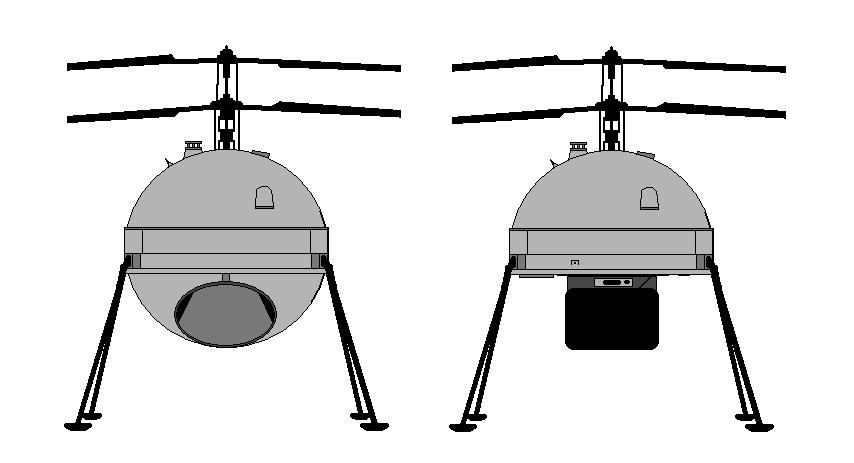
Ключевой особенностью Ка-137 был сферический фюзеляж диаметром около 1,3 метра, выполненный из композиционных материалов. Такая форма позволяла компактно разместить внутри все жизненно важные агрегаты и надёжно защитить их от внешних воздействий. Верхняя полусфера вмещала двигатель, трансмиссию и топливные баки, нижняя отводилась под целевую нагрузку и снабжалась прозрачным окном для оптических и сенсорных устройств.

Машина следовала традиционной для Камова соосной схеме: два несущих винта вращались в противоположных направлениях на одной оси. Это решение избавляло от необходимости в хвостовом винте, делало аппарат компактным и позволяло ему одинаково уверенно двигаться в любом направлении без чётко выраженного «носа». Благодаря отсутствию курсовой ориентации Ка-137 мог поворачиваться вокруг своей вертикальной оси на месте и выполнять сложные манёвры с минимальным радиусом.
Шасси состояло из четырёх рессорных опор, обеспечивавших устойчивость при посадке на неровный грунт. Для морского варианта корпус дополнительно защищал оборудование от коррозии и электромагнитных полей корабельных систем. В целом конструкция представляла собой готовую летающую платформу, на которую в зависимости от задачи можно было устанавливать нужный комплект приборов.
Технические характеристики
Силовая установка Ка-137 была построена вокруг поршневого четырёхтактного двигателя немецкого производства Hirth 2706 R05, развивавшего мощность 65 лошадиных сил (50 кВт). Этот компактный мотор размещался в верхней полусфере сферического корпуса, что позволяло добиться оптимальной центровки и защитить его от внешних воздействий.
Масса пустого аппарата составляла примерно 200 килограммов. Максимальная взлётная масса достигала 280 килограммов. Благодаря такой лёгкой конструкции разработчикам удалось обеспечить полезную нагрузку на уровне 50 килограммов в нормальном варианте и до 80 килограммов — в максимальном. Для беспилотного аппарата подобного размера это было весьма серьёзное значение, позволявшее нести разнообразное целевое оборудование.
Несущие винты диаметром 5,3 метра были выполнены по соосной схеме, традиционной для камовских машин. Такое решение в сочетании с мощностью двигателя обеспечивало высокую энерговооружённость и отличную манёвренность без необходимости в рулевом винте.
По лётным данным Ка-137 мог разгоняться до 175 км/ч на максимуме. Крейсерская скорость находилась на уровне 145 км/ч. Практическая дальность полёта превышала 530 километров, а максимальная продолжительность пребывания в воздухе составляла до четырёх часов в зависимости от профиля задания.
Высотные характеристики также выделялись на фоне аналогов того периода: практический (динамический) потолок достигал 5000 метров, а потолок висения (статический) — около 2900-3000 метров. Это открывало возможности применения аппарата в горных районах и на больших высотах.
Отдельное внимание было уделено системе управления полётом. Аппарат оснащался цифровым автопилотом, тесно интегрированным со спутниковой навигационной системой и радиовысотомером. Такая комплектация позволяла выполнять полностью автоматический полёт по запрограммированному маршруту, точное позиционирование в пространстве и автоматический возврат на базу с погрешностью посадки не более 60 метров.
Назначение и возможности
Ка-137 создавался как универсальная машина для решения самых разных задач. В число приоритетных входили воздушная разведка и патрулирование границ, экологический мониторинг и инспекция трубопроводов, аэрофотосъёмка труднодоступных территорий, ретрансляция сигналов связи в удалённых или опасных зонах, доставка грузов и оборудования в районы чрезвычайных ситуаций, а также контроль радиационной и химической обстановки.

Предусматривалось три основных варианта базирования: автомобильный (перевозка на обычных грузовиках), аэромобильный (размещение на борту вертолёта Ка-32) и корабельный. В нижнем отсеке устанавливались телевизионные и тепловизионные камеры, радиолокаторы, аппаратура связи или другие приборы общей массой до 80 килограммов. Такая гибкость превращала Ка-137 в многофункциональный носитель полезной нагрузки, способный работать там, где применение пилотируемой техники было бы сопряжено с высоким риском.
Проведенные испытания и показы
Опытные образцы активно проходили лётные испытания в конце 1990-х — начале 2000-х годов. Машина демонстрировала устойчивость в воздухе, хорошую управляемость и надёжность силовой установки в различных режимах — от длительного висения до полёта по сложным траекториям. В марте 2001 года Ка-137 представили на форуме «Высокие технологии оборонной промышленности» в Москве, где были показаны возможности автоматического полёта и точного зависания над заданной точкой.
Аппарат также экспонировался на специализированных авиационных выставках. Результаты испытаний подтвердили работоспособность цифровой системы управления и всей конструктивной схемы. Однако все работы оставались в рамках опытно-конструкторских этапов, без перехода к серийному выпуску.
Факторы, повлиявшие на судьбу проекта
К середине 2000-х годов проект Ка-137 фактически остановился на стадии нескольких прототипов. Основной причиной стало ограниченное финансирование в условиях экономических трудностей переходного периода: доводка сложной композитной конструкции, прецизионной трансмиссии и системы автоматического управления требовала значительных средств, которых в тот момент не хватало.

Дополнительно сказалось быстрое развитие альтернативных решений. На рынке активно распространялись мультироторные беспилотники — более простые и дешёвые в изготовлении и обслуживании. Для большинства гражданских и многих военных задач квадрокоптеры и гексакоптеры предлагали достаточную грузоподъёмность и функциональность при существенно меньших затратах.
В итоге Ка-137 остался экспериментальной машиной. Хотя серийное производство так и не было запущено, наработки по автоматическому управлению, защите оборудования внутри сферического корпуса и применению соосной схемы в беспилотном варианте были учтены в последующих проектах вертолётных БПЛА. Проект продемонстрировал, как нестандартная форма может эффективно решать задачи повышения защищённости и всесторонней манёвренности, но в конкретных экономических и рыночных условиях начала 2000-х годов не получил дальнейшего развития.
Источник: www.ixbt.com











0 комментариев
Добавить комментарий