Новое гибкое крыло для подводных роботов снижает колебания на 87%
Международная группа ученых из Саутгемптонского университета, Эдинбургского университета и Делфтского технического университета разработала мягкое роботизированное крыло для подводных аппаратов, которое снижает нежелательные колебания подъемной силы на 87 % по сравнению с жесткими конструкциями. Результаты исследования опубликованы в журнале npj Robotics.
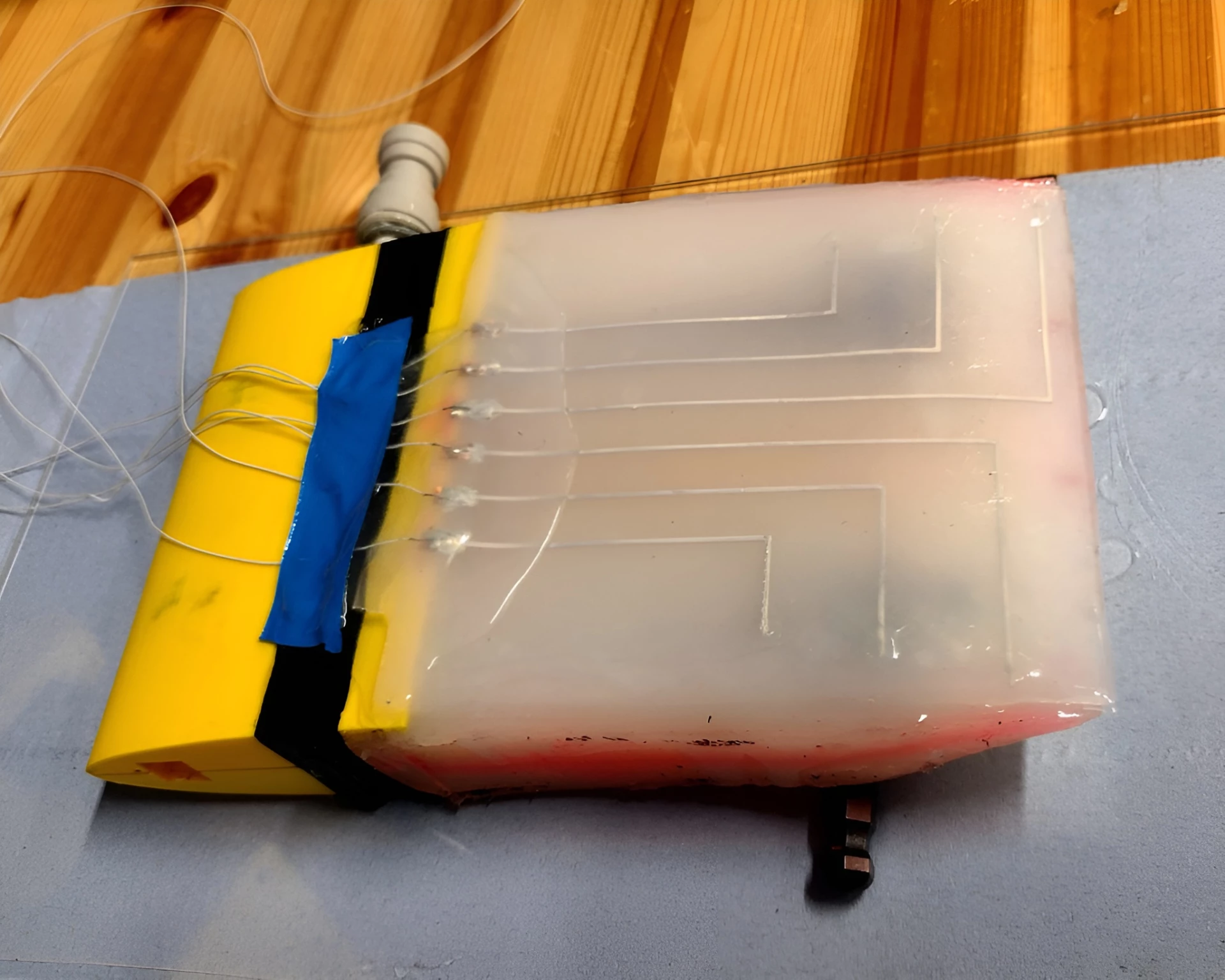
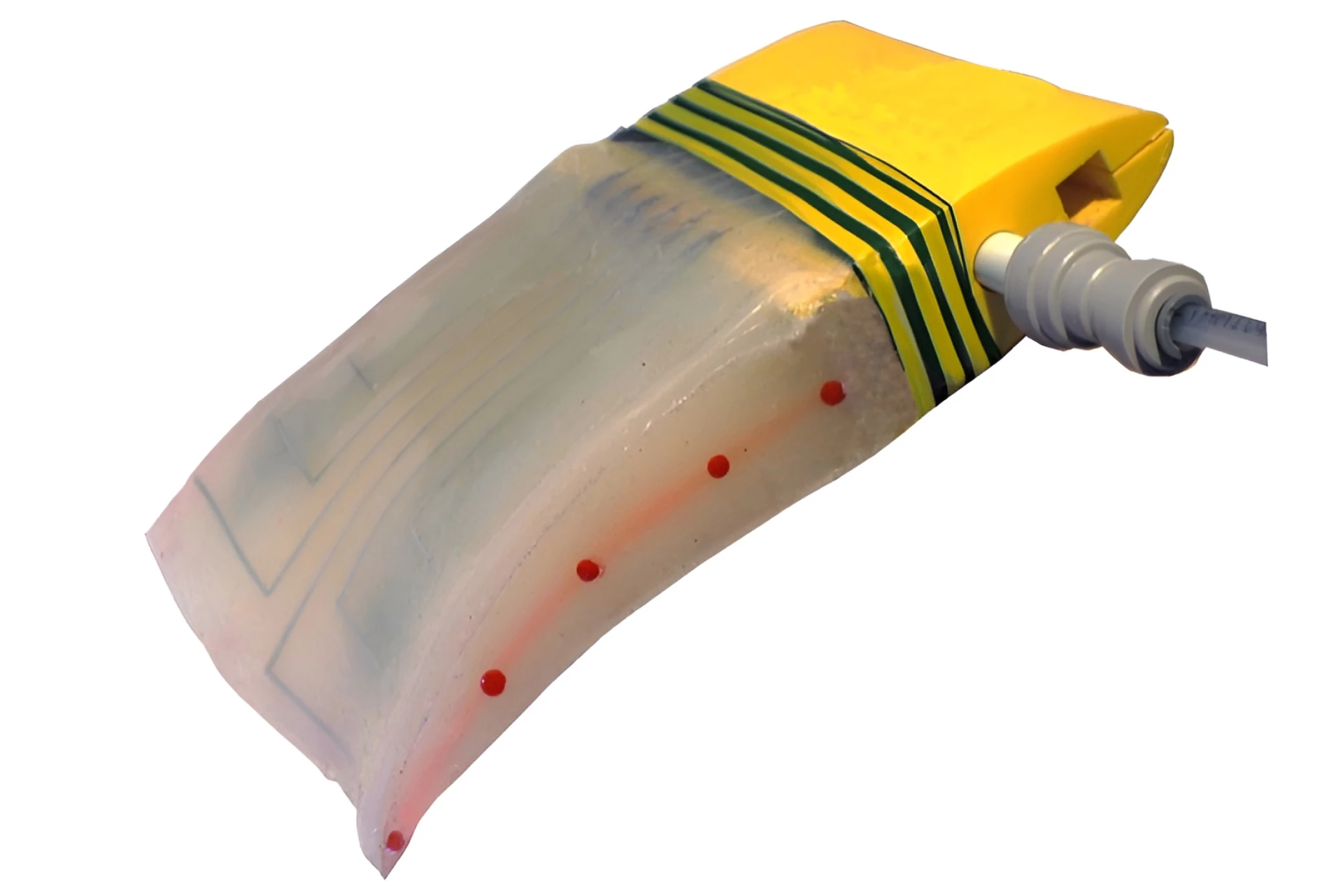
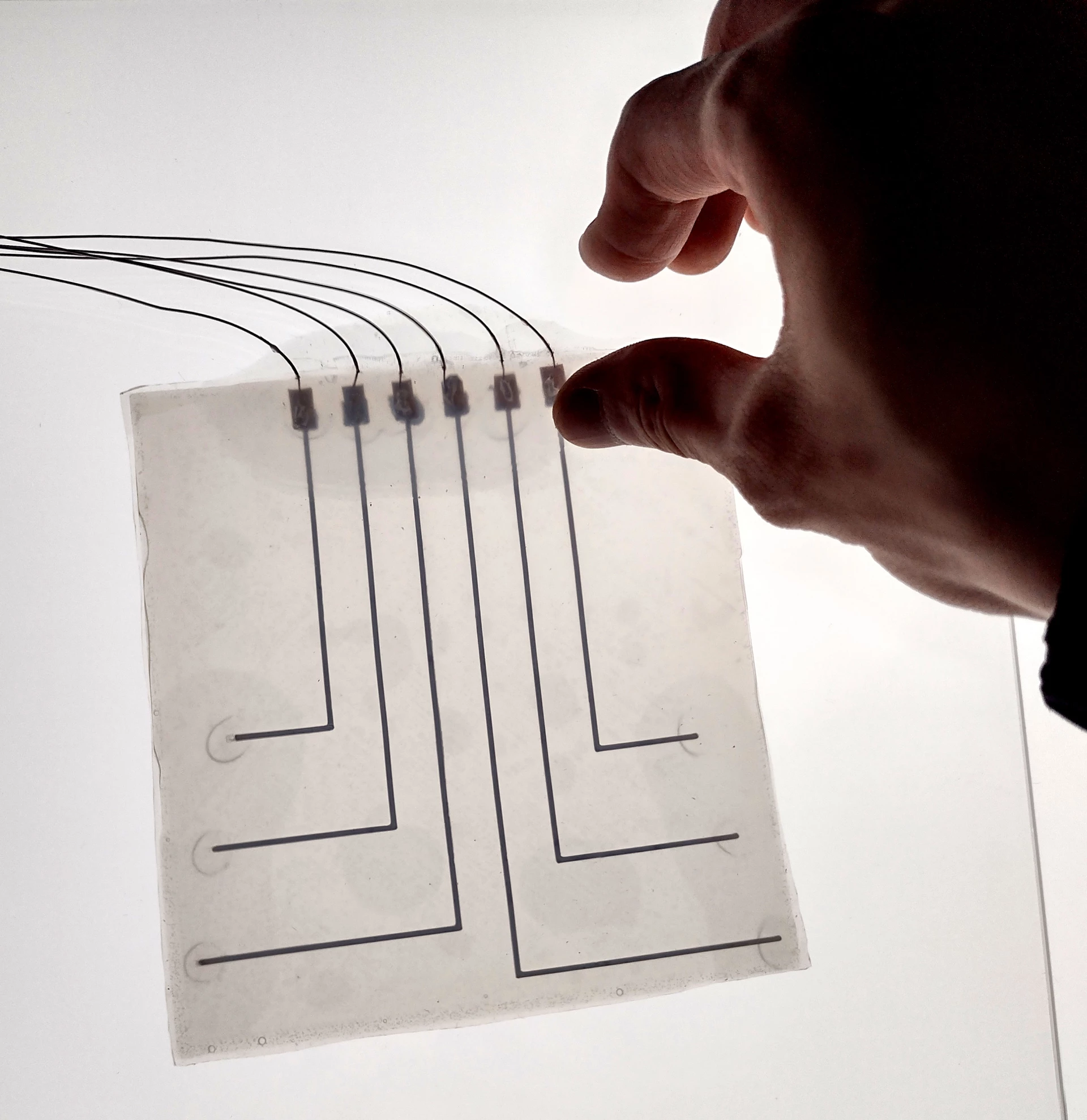
Крыло изготовлено из гибких материалов и покрыто проприоцептивной электронной кожей — тонким силиконовым слоем с жидкими металлическими электродами. При деформации крыла расстояние между электродами изменяется, что фиксируется сдвигом электрической емкости. Это позволяет системе отслеживать форму крыла в режиме реального времени. Две встроенные гидравлические трубки корректируют жесткость и кривизну конструкции на основе данных от датчиков.
Принцип работы основан на проприоцепции — механизме, который используют рыбы и птицы для определения положения и деформации плавников и крыльев в потоке среды. Гибкая конструкция пассивно поглощает часть внешних воздействий, а сенсорная система и приводы компенсируют оставшиеся отклонения.
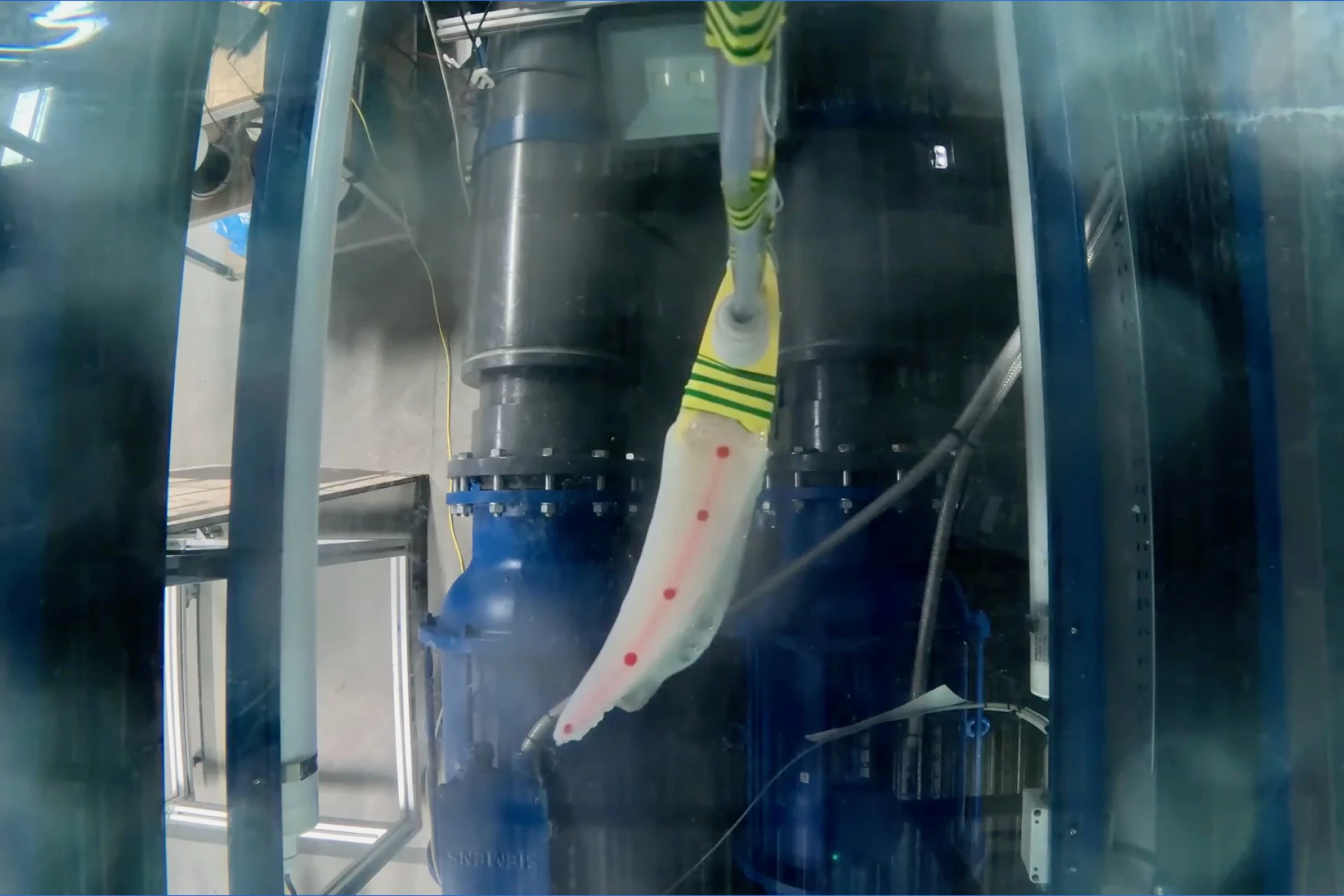
В ходе лабораторных испытаний крыло подвергалось воздействию воздушных потоков различной интенсивности. Жесткие аналоги при тех же условиях резко теряли устойчивость, а мягкие крылья без датчиков не справлялись с сильными возмущениями. Крыло с проприоцептивной системой стабильно удерживало заданную траекторию.
Технология предназначена для дистанционно управляемых и автономных подводных аппаратов, выполняющих инспекцию, ремонт и наблюдение. Ведущий автор исследования Лео Миклем пояснил, что вместо создания более прочных конструкций, способных противостоять океанским течениям, команда сделала ставку на машины, которые работают в гармонии с водной средой.
Источник: New Atlas











0 комментариев
Добавить комментарий