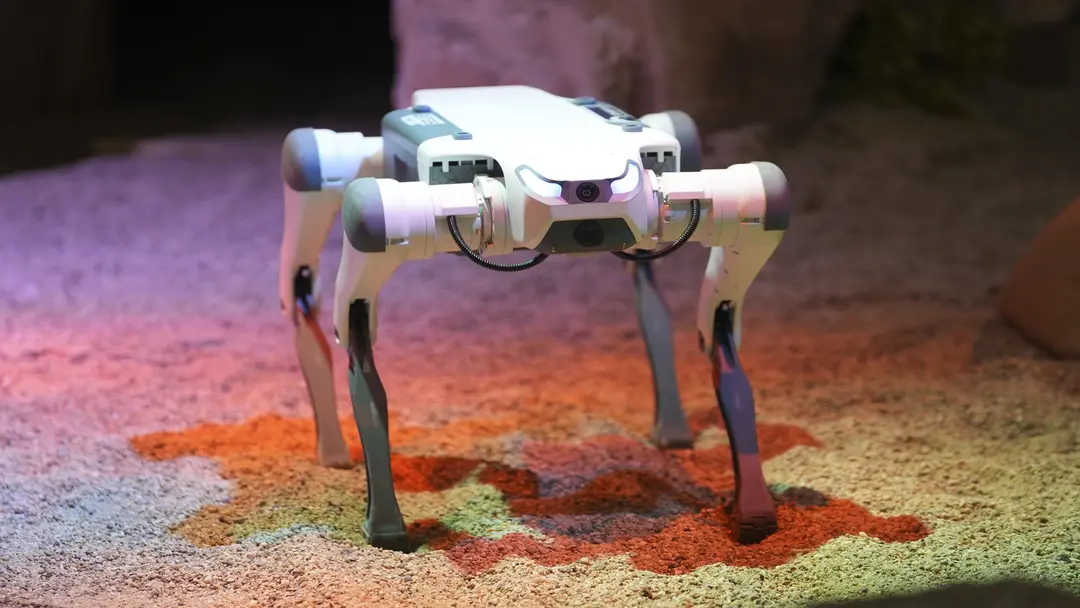
Четвероногий робот освоил ходьбу по скользким поверхностям
Исследователи разработали систему управления четвероногим роботом, которая позволяет машине передвигаться по нестабильным поверхностям с низким коэффициентом трения. Обучение проходило полностью в виртуальной среде без применения заранее запрограммированных алгоритмов движения.
Робот оснащён 12 степенями свободы и использует двухуровневую систему управления. Верхний уровень представляет собой нейронную сеть, генерирующую целевые положения суставов с частотой 10 Гц. Нижний уровень — пропорционально-дифференцирующий контроллер, обрабатывающий команды с частотой 100 Гц. Для ориентации в пространстве машина использует проприоцептивные датчики, фиксирующие углы и скорости суставов, а также имитацию камеры глубины для получения данных о рельефе и характеристиках поверхности.
Обучение строилось по четырёхэтапной программе с постепенным усложнением условий: от ровной поверхности к склонам, затем к пересечённой местности, скользким участкам и комбинированным средам с сенсорным шумом. В основе лежит алгоритм оптимизации проксимальной политики, учитывающий скорость передвижения, устойчивость, энергопотребление и минимизацию проскальзывания.
Тестирование в симуляторе Webots показало скорость передвижения от 0,79 до 0,9 метра в секунду. Частота падений составила от 0% на ровной поверхности до 12% на участках с низким трением. При переносе в другой симулятор PyBullet без дополнительного обучения система достигла 91,2% успешных результатов.
В ходе обучения робот самостоятельно выработал адаптивные паттерны поведения: смещение центра тяжести на склонах, сокращение длины шага на неровностях и замедление на скользких участках. Перенос системы на физические устройства пока затруднён из-за аппаратных ограничений и погрешностей датчиков.
Источник: Interesting Engineering











0 комментариев
Добавить комментарий