

Два исследовательских института - ATR (Advanced Telecommunications Research Institute International) и HRI (Honda Research Institute Japan Co) - разработали новый интерфейс, получивший обозначение «мозг-машина» (Brain Machine Interface, BMI). Как утверждается, он позволит управлять роботами при помощи сигналов мозговой активности.
Технология BMI стала возможной, когда ученым удалось декодировать сигналы, сопровождающие естественную активность мозга и использовать полученные данные. Отмечается, что взаимодействие с машиной происходит с некоторой задержкой, но довольно близко к реальному масштабу времени. Важно, что для «подключения» к мозгу не используются хирургические меры – другими словами, разъем на затылке остается прерогативой Нео.

На изображениях вы видите процессы сканирования мозговой активности (верхний снимок) и анализа полученных данных при помощи компьютерной программы (ниже).
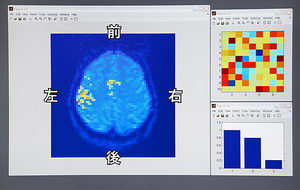
По замыслу исследователей, декодирование сигналов мозга позволит манипулировать «руками» робота примерно так же, как это происходит, когда человек управляет своими собственными конечностями. В существующем проекте машина распознает жесты пользователя, используемые в известной игре «камень-ножницы-бумага», и воспроизводит их при помощи манипулятора (третий снимок). Сейчас задержка между мыслью и действием составляет около 7 секунд – время расходуется на анализ гемодинамических показателей мозга. Другими словами, есть простор для совершенствования разработки. То же касается и точности распознавания – пока она достигает 85%. Определенные надежды относительно повышения скорости и точности распознавания ученые связывают с использованием дополнительно других показателей мозговой активности – в частности, электрических и магнитных полей.

В то же время, потенциал проекта трудно переоценить – в случае успеха, управление машинами может принять куда более естественный характер, чем нажатие на кнопки, рычаги и педали. Стоит отметить, что подобные работы ведутся уже достаточно давно – но в них, как правило, используется вживление и другие контактные способы подключения электродов, что ограничивает практическое значение этих систем.
Источник: PhysOrg