Учёные создали устройство, позволяющее легко обучать роботов
Научная группа инженеров Массачусетского технологического института разработала инновационную систему обучения роботов, получившую название «универсальный демонстрационный интерфейс» (VDI). Принципиальное отличие новой разработки заключается в объединении трех различных методик обучения в одном компактном устройстве, которое совместимо с большинством современных коллаборативных роботов-манипуляторов.
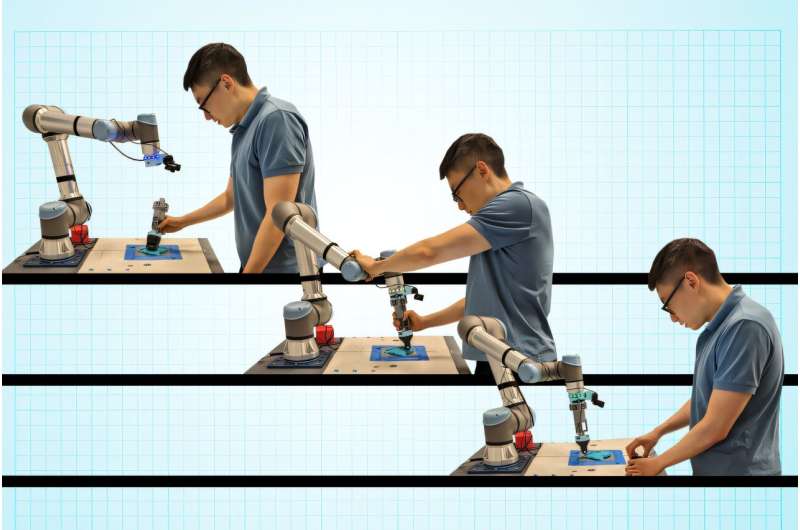
Созданный интерфейс позволяет обучать робота посредством телеоперации (удаленное управление через джойстик), кинестетического метода (физическое направление робота человеком) и естественной демонстрации (выполнение задачи человеком под наблюдением робота). Ранее роботизированные системы поддерживали лишь один из этих подходов, что существенно ограничивало их применение.
Техническая реализация VDI включает интегрированную камеру для визуальной фиксации движений, специальные маркеры для отслеживания пространственного положения и комплекс датчиков давления. При подсоединении к роботизированному манипулятору устройство регистрирует все параметры движений, которые затем преобразуются в обучающие данные. Примечательно, что интерфейс можно отсоединять от робота и использовать автономно для демонстрации требуемых операций.
Практические испытания системы проводились в производственном инновационном центре с привлечением специалистов промышленной сферы. Участники эксперимента обучали робота выполнению двух типовых операций: монтажу штифтовых соединений и формованию эластичных материалов. Каждый доброволец применял все три методики обучения для каждой задачи.
Анализ результатов показал преимущественное предпочтение естественного метода демонстрации среди участников, хотя они отметили практическую ценность каждого подхода в определенных производственных ситуациях. Телеоперация оказалась оптимальной для взаимодействия с опасными субстанциями, кинестетический метод эффективен при манипуляциях с массивными объектами, а естественная демонстрация незаменима для прецизионных операций.
Руководитель проекта Майк Хагеноу планирует модернизировать конструкцию крепления интерфейса с учетом полученных от пользователей рекомендаций и продолжить экспериментальную апробацию системы. Детальная информация о разработке будет представлена на конференции IEEE Intelligent Robots and Systems осенью текущего года.
Источник: Tech Xplore











0 комментариев
Добавить комментарий