Китай провел орбитальные испытания гибкого роботизированного манипулятора
Коммерческий спутник Yuxing-3 06 (также известный как Xiyuan-0) успешно провел на солнечно-синхронной орбите серию испытаний гибкой роботизированной руки, предназначенной для технического обслуживания и дозаправки космических аппаратов. Аппарат был выведен в космос 16 марта 2026 года с космодрома Цзюцюань с помощью ракеты-носителя Kuaizhou-11 Y7. Основной целью миссии стала практическая проверка технологий, необходимых для проведения автономных сборочных работ и замены компонентов спутников в условиях невесомости.
В ходе орбитальных тестов инженеры отработали четыре различных сценария управления полезной нагрузкой. На первом этапе манипулятор продемонстрировал способность к автономному планированию траектории: механизм самостоятельно переместился из стартового положения в точку стыковки и обратно, имитируя процесс дозаправки без участия наземных операторов. Второй сценарий предусматривал дистанционное управление в режиме реального времени, при котором специалисты на Земле направляли руку с помощью контроллеров, ориентируясь на видеосигнал с бортовой камеры от первого лица.
Третий этап тестирования базировался на технологии визуального сервопривода. Позиционирование рабочего органа манипулятора корректировалось в реальном времени с использованием машинного зрения и замкнутого контура управления между наземными вычислительными мощностями и бортовыми системами. На финальном этапе проверялась точность силовой обратной связи: опираясь на данные тензометрических датчиков, манипулятор с заданным усилием начертил на тестовой панели прямые линии и геометрические фигуры.
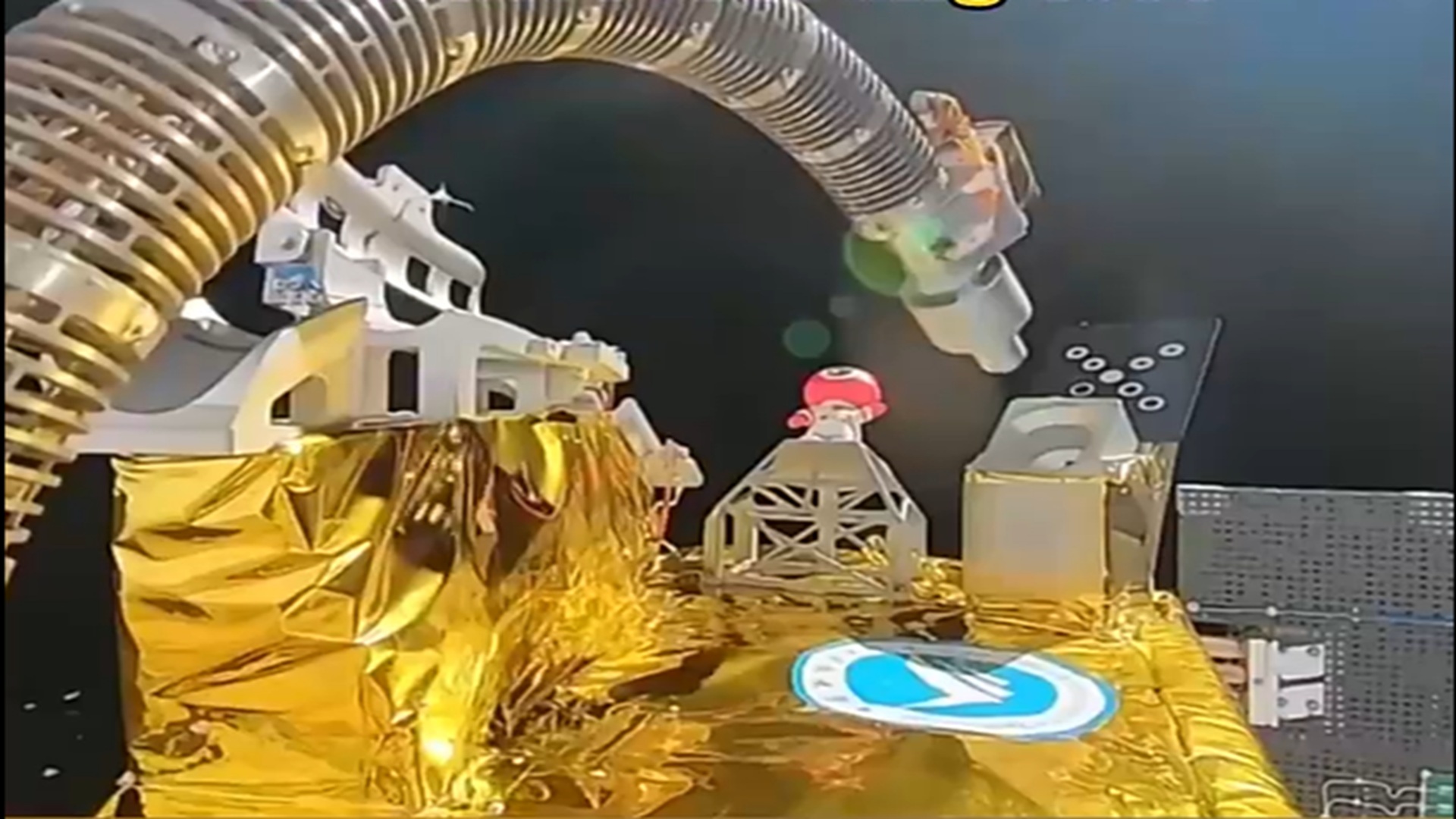
Основным элементом протестированной системы является полая гибкая стрела с задним тросовым приводом. Данная конструкция, разработанная компанией Suzhou Sanyuan Aerospace Technology совместно с исследователями Университета Цинхуа, позволяет разместить наиболее уязвимые компоненты управления приводом внутри герметичного корпуса спутника (платформа предоставлена Shenzhen Mofang Satellite Technology). Такое архитектурное решение защищает электронику от перепадов температур и космической радиации, а полая структура манипулятора обеспечивает возможность безопасной прокладки топливных магистралей.
Связь с аппаратом во время испытаний поддерживалась через сеть наземных станций. Технические параметры канала обеспечили передачу телеметрии и команд управления с задержкой менее одной секунды. Продолжительность сеанса непрерывной связи в ходе одного пролета спутника над станцией достигала 20 минут, что позволило операторам осуществлять высокоточные манипуляции в режиме реального времени.
Источник: Interesting Engineering











0 комментариев
Добавить комментарий