Ученые создали робота, который использует осязание и зрение для манипуляций с объектами
Международная исследовательская группа из Университета Тохоку, Гонконгского научного парка и Университета Гонконга разработала инновационную систему «TactileAloha», которая объединяет визуальную и тактильную информацию для управления роботизированными манипуляторами. Система построена на базе открытой платформы ALOHA, созданной Стэнфордским университетом.
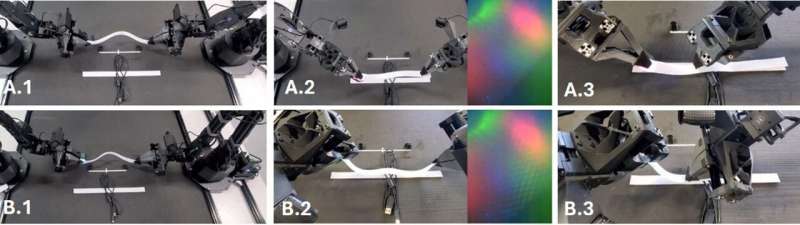
В отличие от традиционных роботов, полагающихся исключительно на компьютерное зрение, TactileAloha способна различать текстуры материалов и определять ориентацию предметов через осязание. Это позволяет роботу эффективно манипулировать объектами, требующими точного определения лицевой и изнаночной стороны, например, липучками и кабельными стяжками.

Профессор Мицухиро Хаясибэ из Высшей инженерной школы Университета Тохоку отмечает, что система принимает оперативные решения на основе текстурных характеристик объектов, которые сложно определить только визуально. Робот демонстрирует адаптивное управление, автоматически генерируя различные движения в зависимости от ситуации.
В ходе экспериментов TactileAloha продемонстрировала высокий процент успешного выполнения задач по сравнению с системами, использующими только компьютерное зрение. Робот способен захватывать объекты, определять их ориентацию с помощью тактильных датчиков, корректировать положение и угол наклона, а затем выполнять точные манипуляции.
Результаты исследования опубликованы в журнале IEEE Robotics and Automation Letters. Учёные считают, что данная разработка представляет значительный прогресс в области мультимодального физического искусственного интеллекта и приближает создание роботов-помощников, способных выполнять сложные бытовые задачи.
Источник: Tech Xplore











0 комментариев
Добавить комментарий