Ученые разработали робота, способного взбираться по стенам
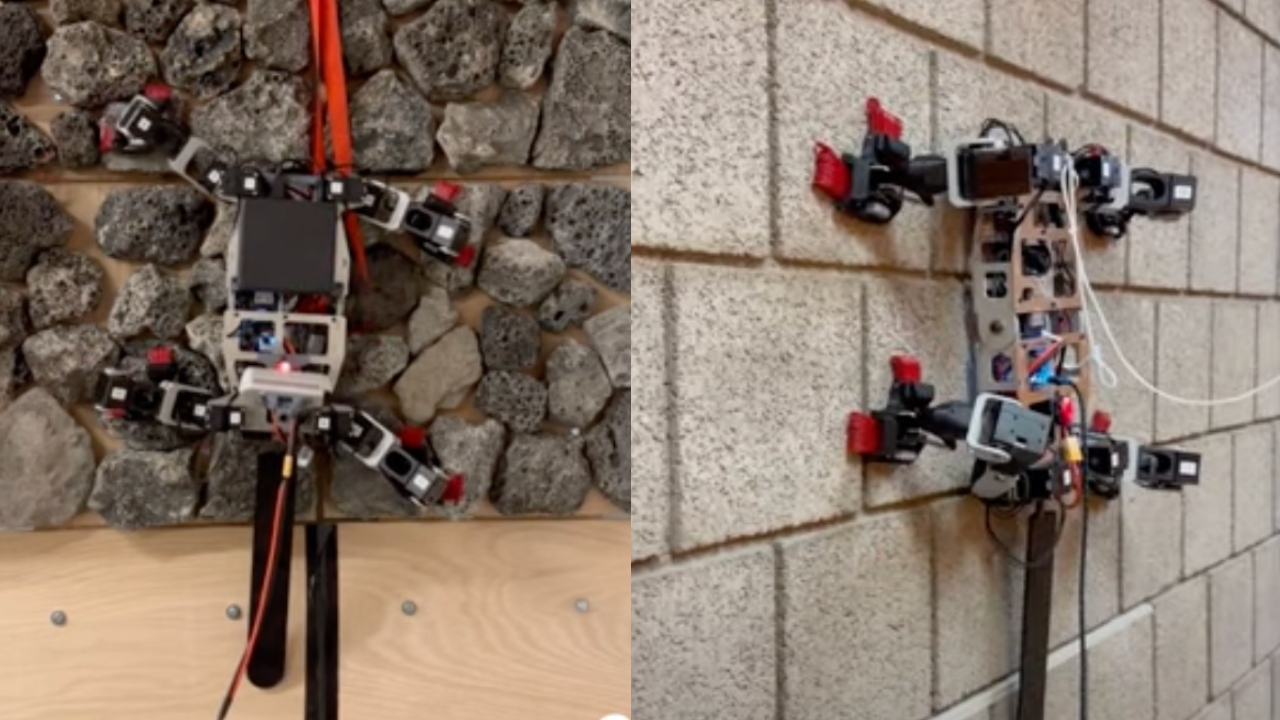
LORIS — это робот-скалолаз, название которого созвучно с именем одного из самых известных приматов, но система лазания, которую он использует, основана на насекомых: из четырех конечностей он выпускает две, расположенные по диагонали друг против друга, чтобы держаться на высоте, оставаясь при этом закрепленным двумя другими, также расположенными по диагонали. Для надежного захвата на конце каждой конечности встроены микро-крючки с крошечными зацепами, которые прилипают практически к любой поверхности.
Мир робототехники ежедневно стремится к созданию машин, способных выполнять задачи наиболее эффективным способом. Одна из задач — выполнять действия как можно быстрее, другая — двигаться наиболее похожим на человеческий образом, а третья — лазать. Существуют роботы, способные лазать по поверхностям с помощью всасывающих систем, которые присасывают их ноги, чтобы прилипнуть к поверхности; однако лазание становится затруднительным, когда они пытаются взобраться на поверхность с зазорами, которая не является достаточно гладкой, поскольку они не могут уплотнить всасывание, не выпустив воздух.
Альтернативой этой системе являются микророботы-захваты. Роботы оснащены крючками, которые цепляются за стену с помощью крошечных, острых микророгов, протискивающихся сквозь углубления и трещины поверхности. Проблема этой системы заключается в том, что она эффективна на стенах, которые всегда вертикальны, но не на стенах, которые меняют угол наклона и местами более крутые, например, на скалах. Чтобы решить эту проблему, некоторые интегрируют крюки, которые погружаются в поверхность, но они, как правило, потребляют слишком много энергии и ресурсов.
Решением проблемы стал робот LORIS, названный в честь животного, что расшифровывается как «Легкий робот-наблюдатель для неровных склонов». Это легкий робот с микрошипами на конце каждой из четырех конечностей. Он отличается от других роботов с микроспинными крюками тем, что имеет два набора захватов на каждой конечности, возможность поворота каждой конечности для большей оперативности, и при этом весит очень мало.
Кроме того, его основной особенностью является диагональная система захвата. Он всегда держит две диагонально противоположные конечности, например, левую «руку» и правую «ногу», хотя на самом деле все его конечности — это одинаковые ноги. Обе конечности прикладывают силу к внутренней стороне клешней, что удерживает ее, в то время как две другие, также противоположные по диагонали, стремятся зацепиться за другую часть стены. Эта система, вдохновленная насекомыми, называется захватом, направленным внутрь (DIG).
Для того чтобы понять, где закрепиться и как двигаться дальше, LORIS использует встроенную камеру с датчиком глубины и микропроцессор. Однако эти компоненты и сама конструкция не делают его дорогим, по словам его создателей, которые отмечают, что он прост и недорог в производстве.
Робот был создан Полом Наданом, Спенсером Бэкусом, Аароном М. Джонсоном и коллегами из Лаборатории робомеханики Университета Карнеги-Меллон.
Источник: Robomechanics Lab











0 комментариев
Добавить комментарий