Роботизированная кисть из EPFL поддерживает до шести пальцев и передвигается без манипулятора
Исследователи Федеральной политехнической школы Лозанны (EPFL) разработали роботизированную руку нового типа, которая превосходит возможности человеческой кисти. Результаты работы опубликованы в журнале Nature Communications.
Устройство поддерживает до шести пальцев с силиконовыми наконечниками. Конструкция позволяет любой комбинации пальцев образовывать противоположные пары, что устраняет проблему асимметрии, свойственную человеческой руке с единственным большим пальцем. Тыльная и ладонная стороны робота взаимозаменяемы благодаря реверсивной конструкции.
Ключевая особенность разработки — возможность отсоединения от роботизированного манипулятора. После отсоединения рука может самостоятельно перемещаться, используя пальцы для ползания, чтобы добраться до объектов, находящихся вне зоны досягаемости основной руки. При этом устройство удерживает предметы под ладонью, на тыльной стороне или одновременно с двух сторон.
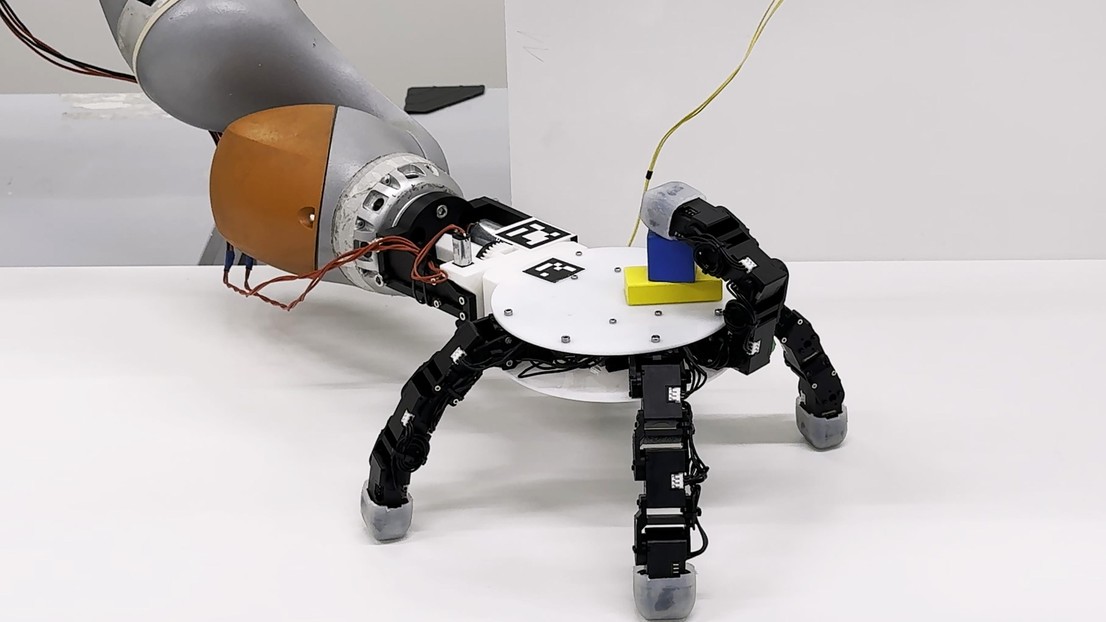
В конфигурации с пятью пальцами робот воспроизводит стандартные человеческие хватательные движения. Версия с шестью пальцами выполняет задачи, для которых обычно требуются обе руки: откручивает крышки больших ёмкостей или работает с отвёрткой.
Разработкой занимались специалисты из Лаборатории алгоритмов и систем обучения под руководством Оуда Биллард совместно с Лабораторией проектирования и изготовления вычислительных роботов. При проектировании учитывались принципы передвижения осьминогов и богомолов, у которых одни конечности выполняют функции захвата и передвижения.
Авторы указывают на потенциальное применение технологии в промышленной робототехнике, сервисных системах и протезировании.
Источник: EPFL











0 комментариев
Добавить комментарий