Новая роботизированная рука различает вес и температуру предметов
Исследовательская группа из Университета Южной Калифорнии представила инновационную роботизированную руку MOTIF (Multimodal Observation with Thermal, Inertial, and Force sensors), способную безопасно взаимодействовать с объектами различной температуры и массы. Разработка была недавно продемонстрирована на конференции ISER 2025 в Санта-Фе.
MOTIF представляет собой усовершенствованную версию платформы LEAP, дополненную комплексом сенсорных устройств: тепловизионной камерой, датчиком глубины, RGB-визуальным сенсором, инерциальным измерительным блоком (IMU) и тактильными датчиками. Такая комбинация позволяет роботу получать многоуровневую информацию об объектах и окружающей среде.
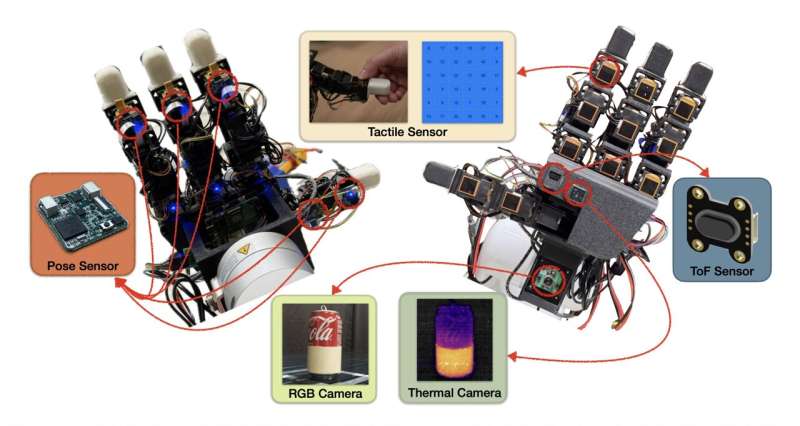
В ходе лабораторных испытаний MOTIF продемонстрировала две ключевые способности. Во-первых, рука успешно идентифицировала горячие участки предметов и адаптировала стратегию захвата для избегания контакта с ними. Во-вторых, система точно определяла массу объектов с идентичной формой путем простых движений кончиками пальцев, анализируя данные инерциальных датчиков.
Основной инженерный вызов, решенный командой под руководством Дэниела Сейты, заключался в интеграции разнородных сенсоров в единую функциональную систему. По словам исследователей Ханьяна Чжоу и Вэньхао Лю, существующие коммерческие манипуляторы фокусируются преимущественно на механических аспектах, игнорируя комплексное сенсорное восприятие, необходимое для сложных задач.
Потенциальные области применения MOTIF включают профессиональные кухни, где требуется безопасное обращение с горячей посудой, промышленные среды с высокими температурами (сталелитейные и литейные производства), а также задачи, требующие точной оценки силы при манипуляциях с объектами различной массы.
В планах исследователей — интеграция дополнительных высокоточных тактильных датчиков для кончиков пальцев (включая Digit 360), совершенствование алгоритмов мультимодального восприятия и расширение тестирования в сложных реальных условиях, требующих комплексного анализа тепловых и силовых параметров.
Источник: Tech Xplore











0 комментариев
Добавить комментарий