Для работы проектов iXBT.com нужны файлы cookie и сервисы аналитики.
Продолжая посещать сайты проектов вы соглашаетесь с нашей
Политикой в отношении файлов cookie
Небольшой станок ЧПУ для DIY
Пост опубликован в блогах iXBT.com, его автор не имеет отношения к редакции iXBT.com
Давно хотел погрузиться в мир ЧПУ. Будь то 3D принтер, лазерный гравер или фрезерный станок. Конечно, можно было собрать самому, но там довольно много хитростей, которые новичку освоить сразу довольно сложно.
Поэтому решил остановиться на готовом комплекте небольшого фрезерного станка. Магазин GEARBEST порадовал очередной скидкой и я по цене менее $200 с доставкой в РФ приобрел я это китайское чудо.
Правда все 19 дней, пока Xiang Feng Logistics везла мне станок из магазина, я терзался мыслью, а не дешевле ли и проще было в разнобой купить все детальки? Да и противоречие в названии «Лазерный гравер» и описании станка вызывала некоторые сомнения. Храктеристики станка довольно скромненькие
Ход по осям: 130х110х45мм
Точность обработки: 0.1мм
Максимальная скорость перемещения: 600мм/мин
Мощность двигателя шпинделя: 80Вт (24В)
Патрон шпинделя: 3.125мм
Рама: Алюминиевый профиль 2020
Рабочий стол: Алюминиевый профиль 2080 шириной 150мм
Фланцы: Сталь 4мм
Контроллер: Arduino UNO с Cnc Shield и тремя драйверами шаговых двигателей, управление шпинделем через реле
ПО: grblcontrol и ARTCAM2008
Поиск в интернете порадовал, что элементы рамы, направляющие и «червяки» можно купить любого размера. В качестве шпинделя вполне можно приспособить гравер. В общем станочек имеет неплохие шансы на модернизацию.
Но сперва нужно освоится с тем, что есть:
Курьер вручил мне 6 кг посылку довольно скромных размеров А внутри четыре коробки поменьше, два блока питания и куча железок
Размеры всего этого дела опять же небольшие В первой коробочке лежали три шаговых двигателя NEMA 17HD2447 и двигатель шпинделя с патроном Во второй — разные железки фланцев и прочих конструкций В третьей крепеж, подшипники и прочие мелкие детальки В последней — контроллер с шилдом, провода и прочая электроника
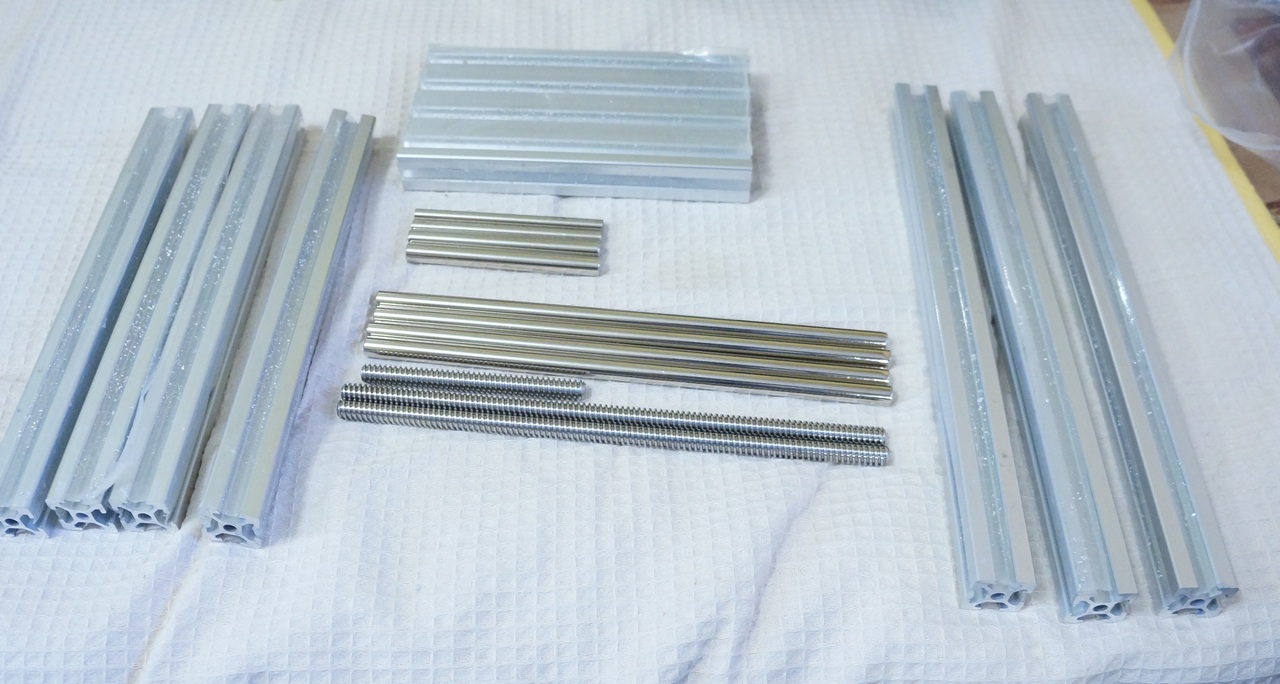
Два блока питания 24В 4А для основного мотора, с гордой надписью EPSON и 12В 3А для шаговиков Ну и элементы рамы, направляющие и шпильки осей В комплекте шли три фрезы И НИКАКОЙ ИНСТРУКЦИИ!!! В описании товара правда была ссылочка на китайский файлообменник BAIDU.COM, с которого после некоторых танцев с бубнами и субтитрами на китайском удалось скачать несколько видео о том, как лихо станок режет какой-то рельеф, китайский дистрибутив ARTCAM2008 и архив с прошивками, примерами и какими то документами на китайском. Инструкции по сборки не было даже на китайском. Написал об этом в поддержку магазина, но не надеется же на это. Нужно разбираться со всем этим барахлом, вспоминая с благодарностью свой диплом советского инженера. Инструкция по сборке нарисовалась такая:
Смотреть на немногочисленные картинки магазина и собирать то что понятно, уменьшая количество свободных деталек.
Для остальных применять «метод тыка».
Если что-то при запуске пойдет не так, всегда можно разобрать и собрать по новому.
Все, что плохо закрепилось, крепить на синюю изоленту
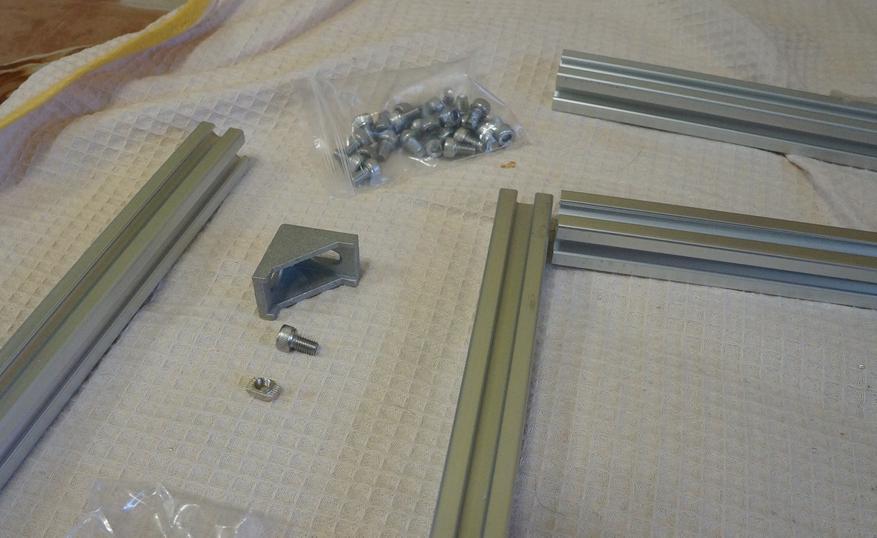
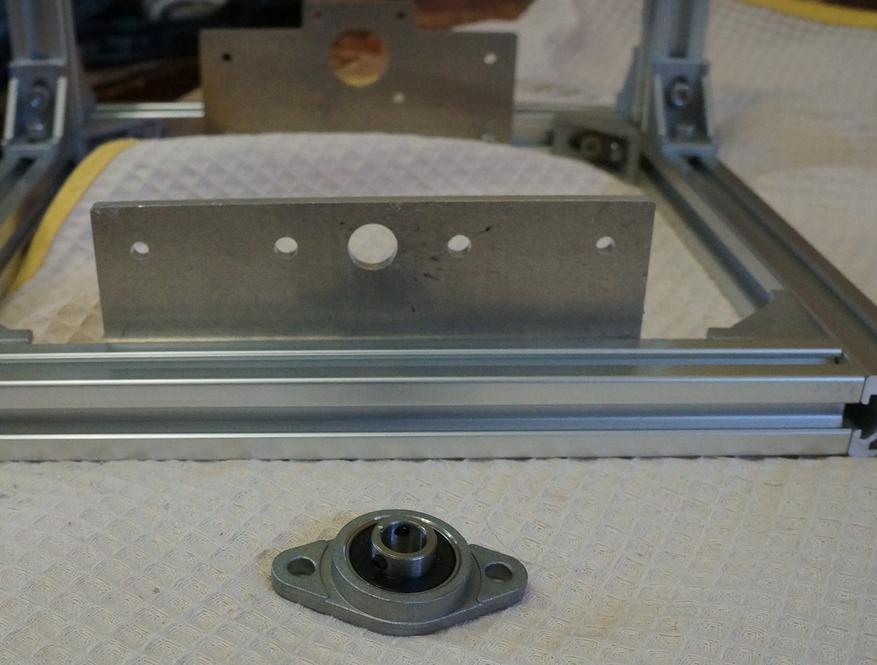
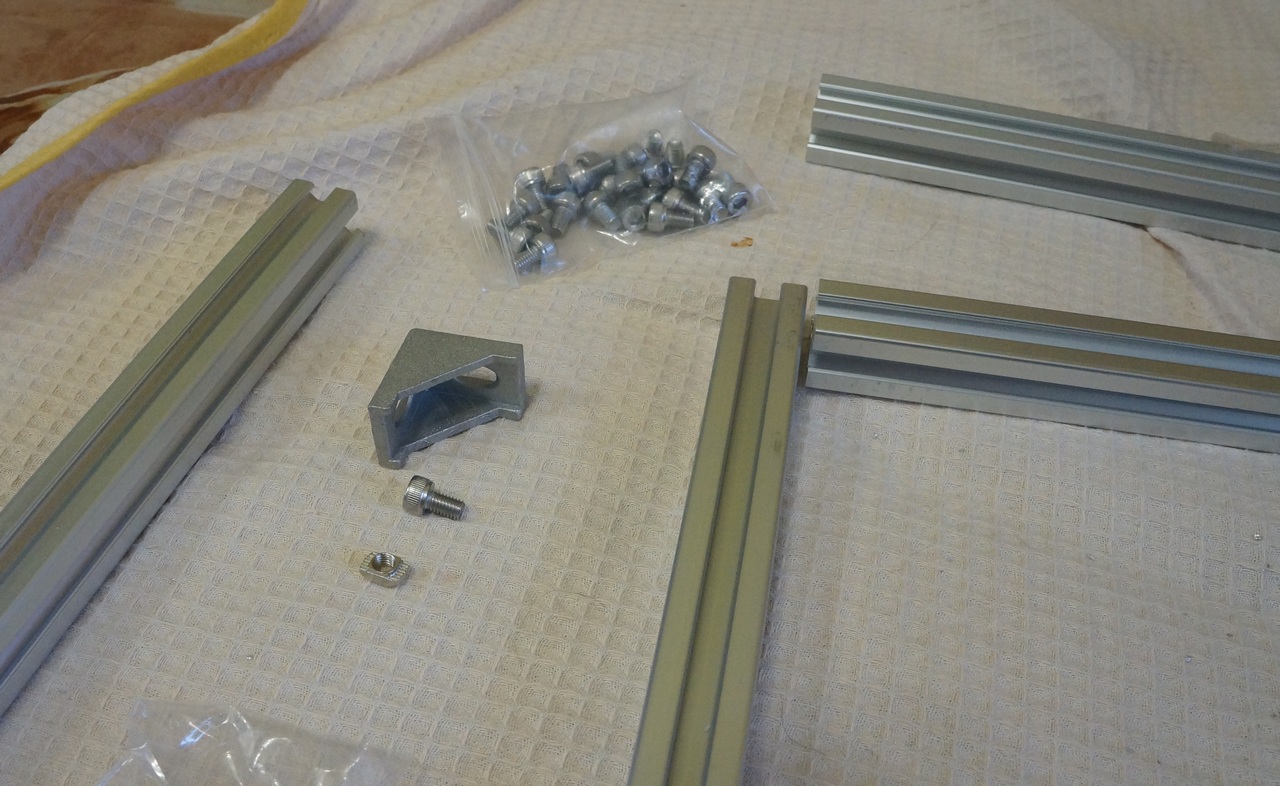
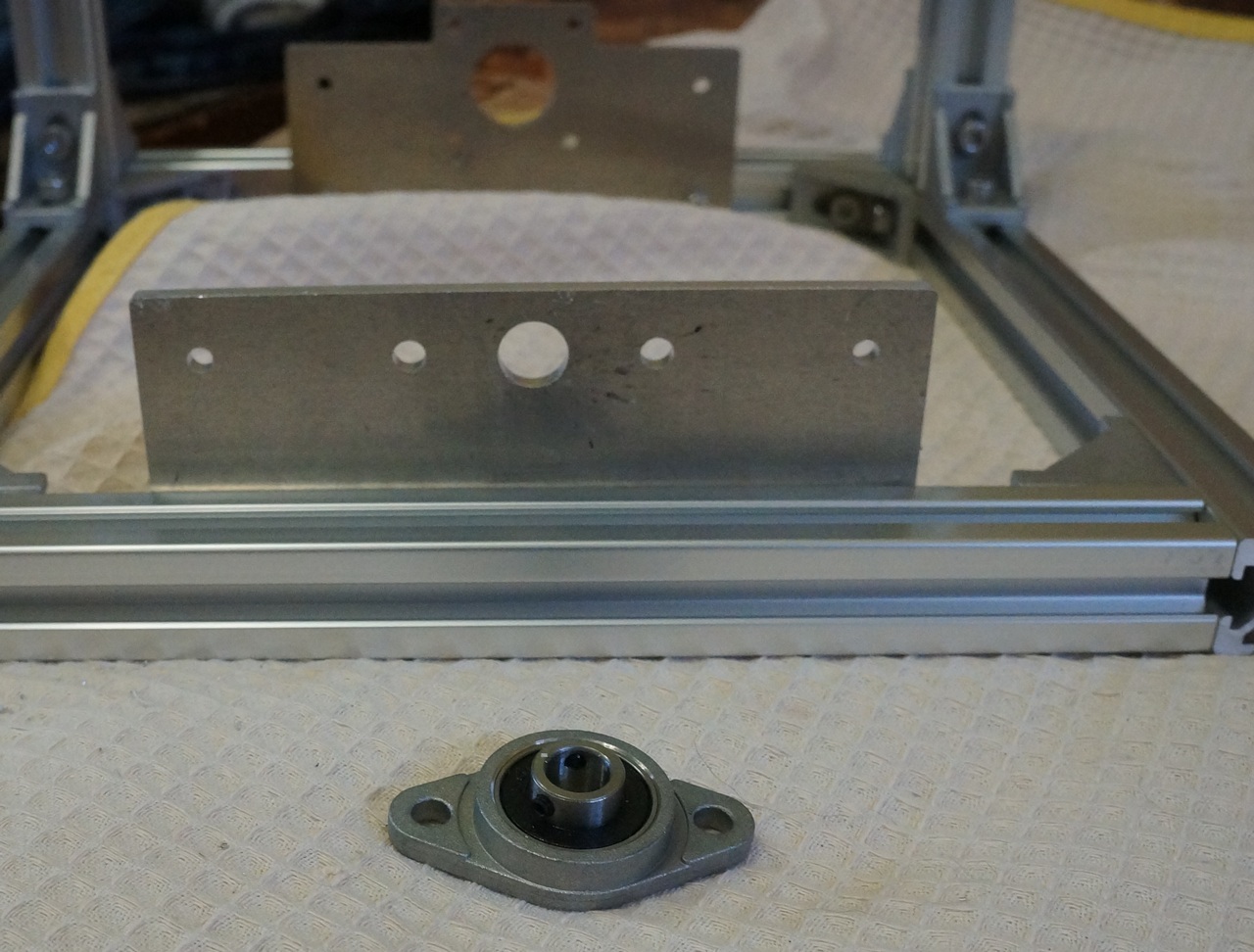
СборкаСамое очевидное рама Покрутив в руках разный крепеж и потыкав его в разные дырки пришел к выводу, что 6 винтов и гаек M5 нужны для крепления подшипников.
M4 — подходят для рамы и фланцев, а M3 для двигателей, направляющих червяков осей и прочих маленьких деталек. Все винты в комплекте под внутренний шестигранник, коих шло в комплекте аж 5 штук разного размера.
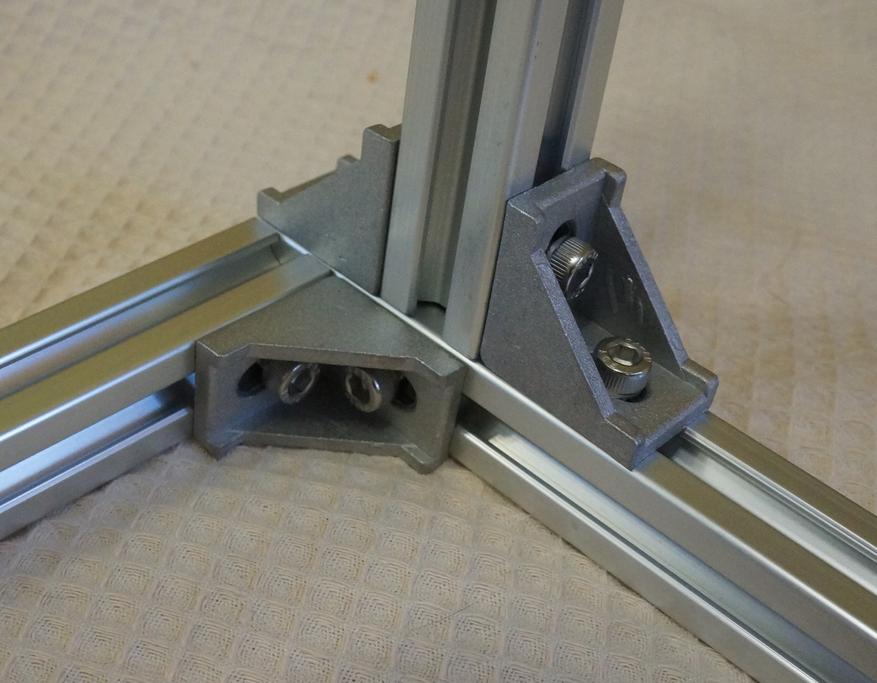
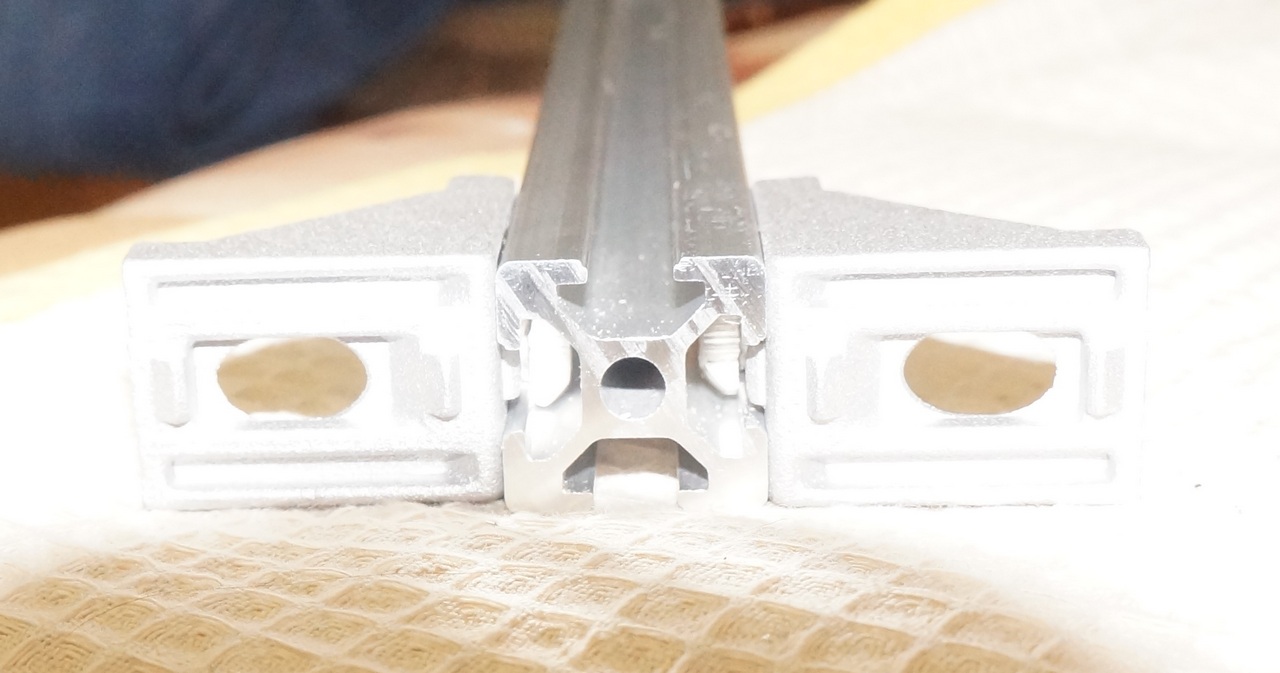
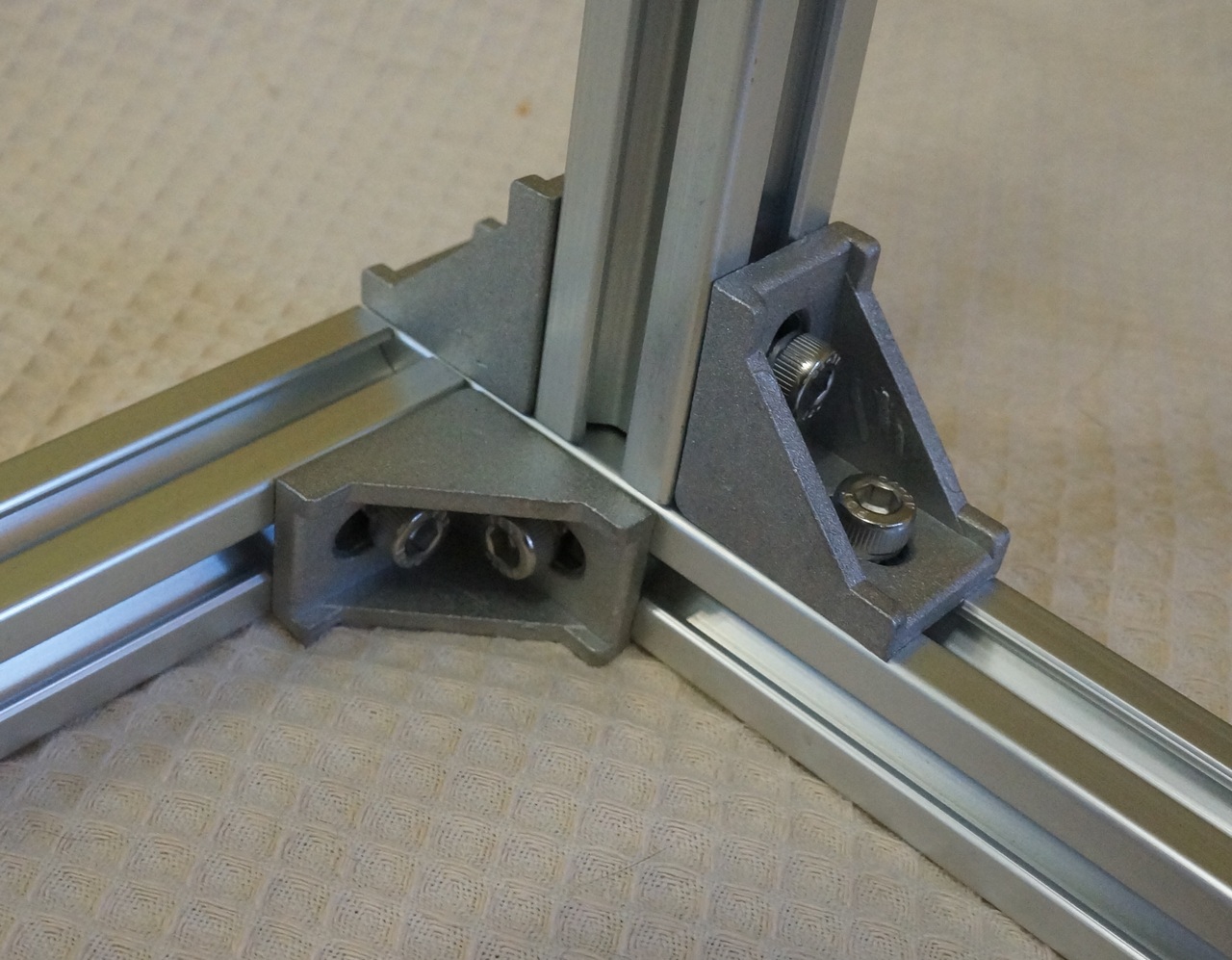
Профили рамы соединяются силуминовыми уголками и винтами M4 со специальными гайками «в профиль».
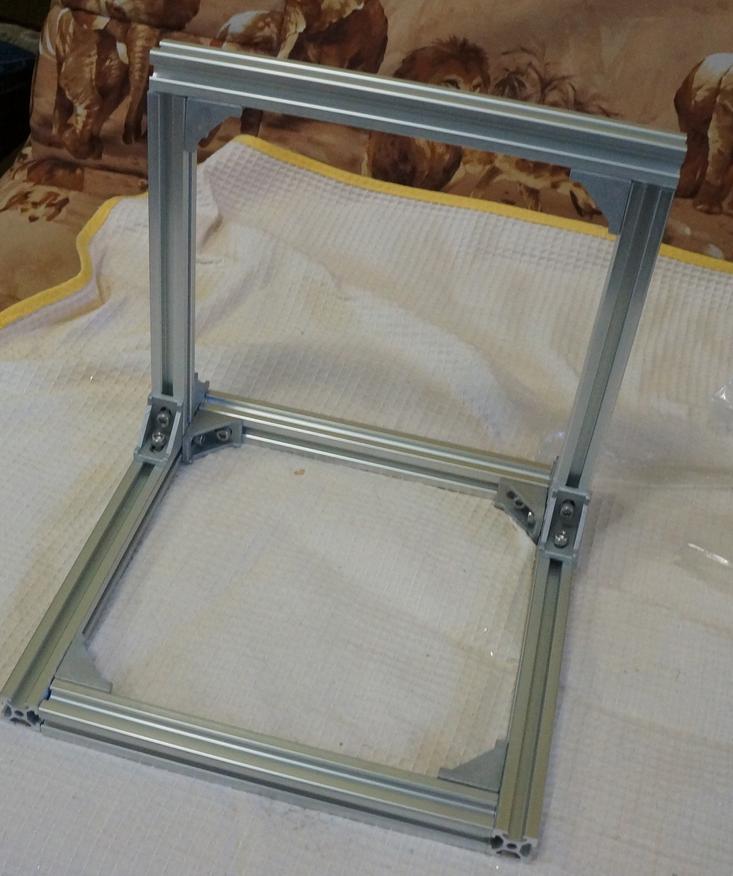
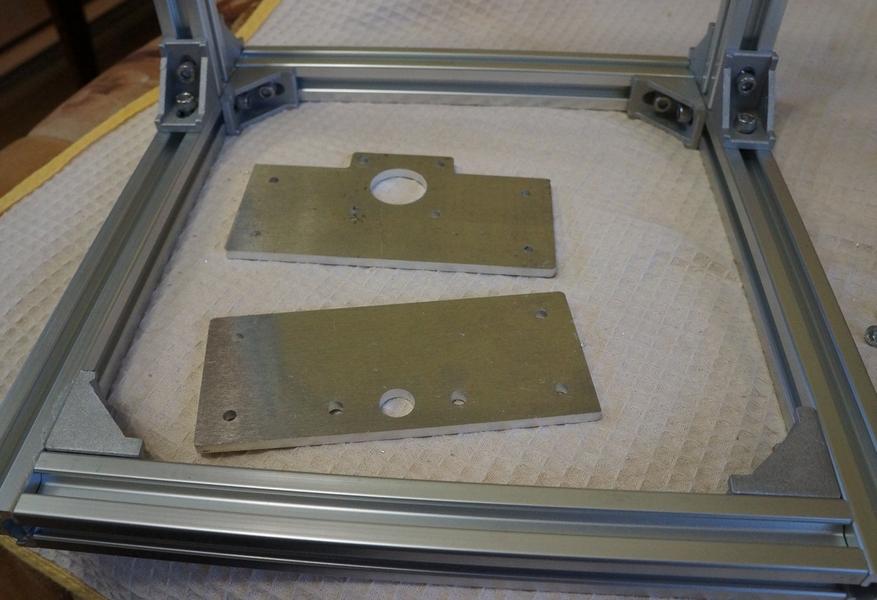
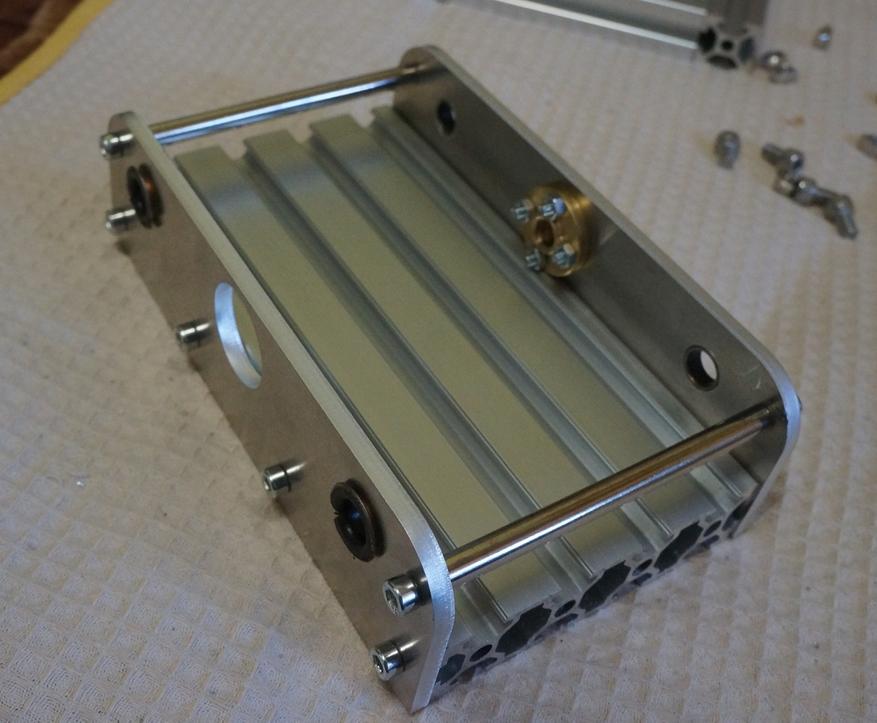
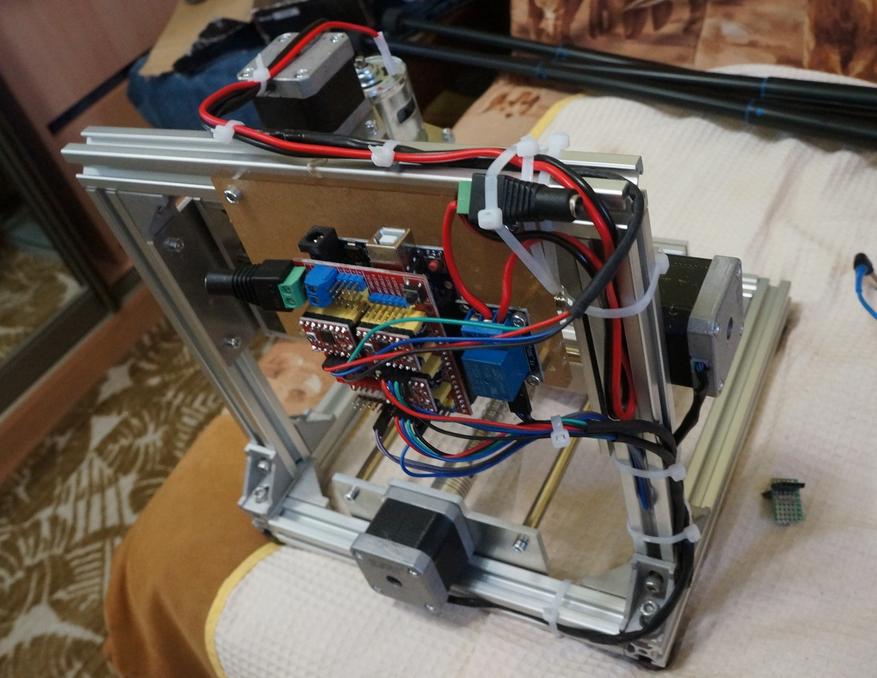
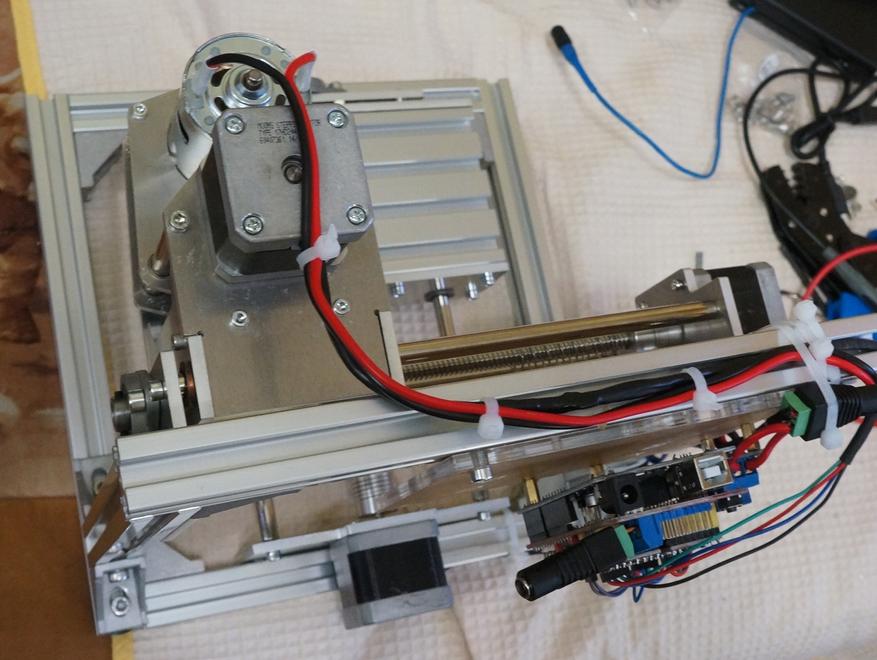
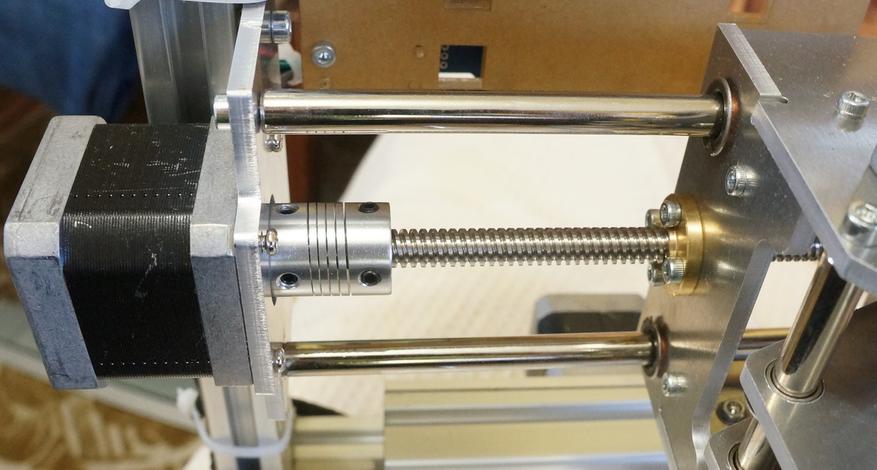
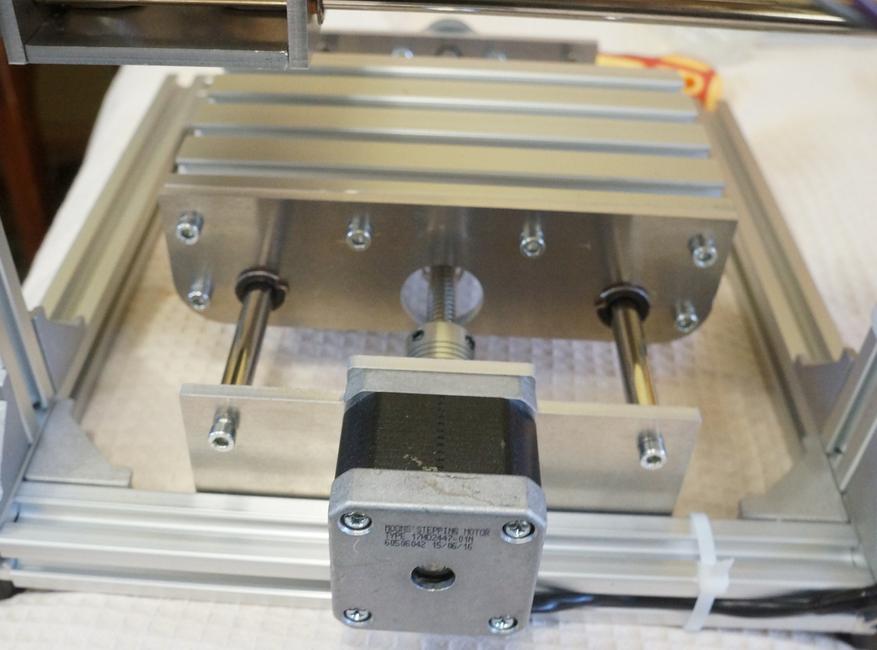
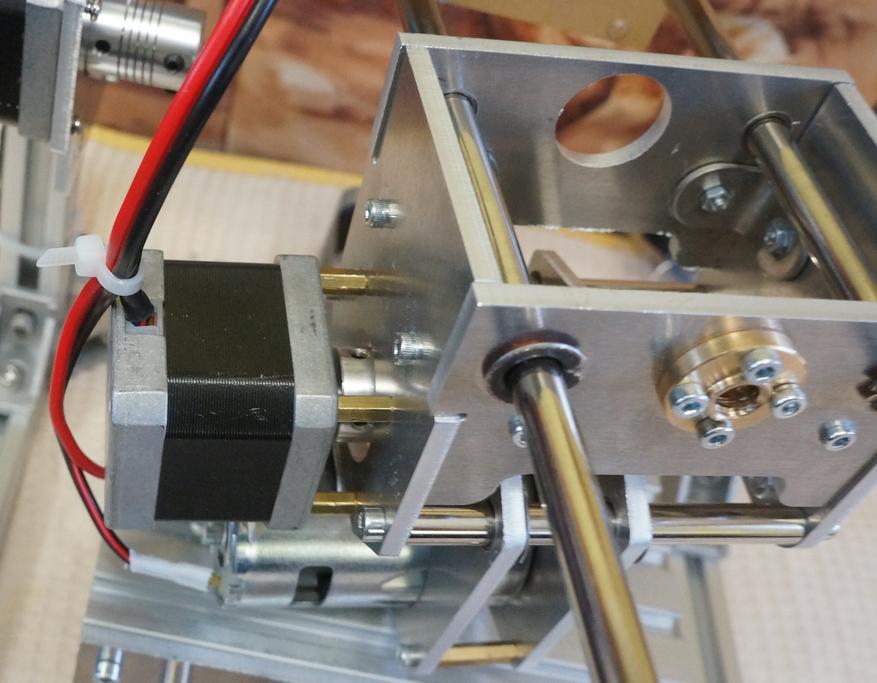
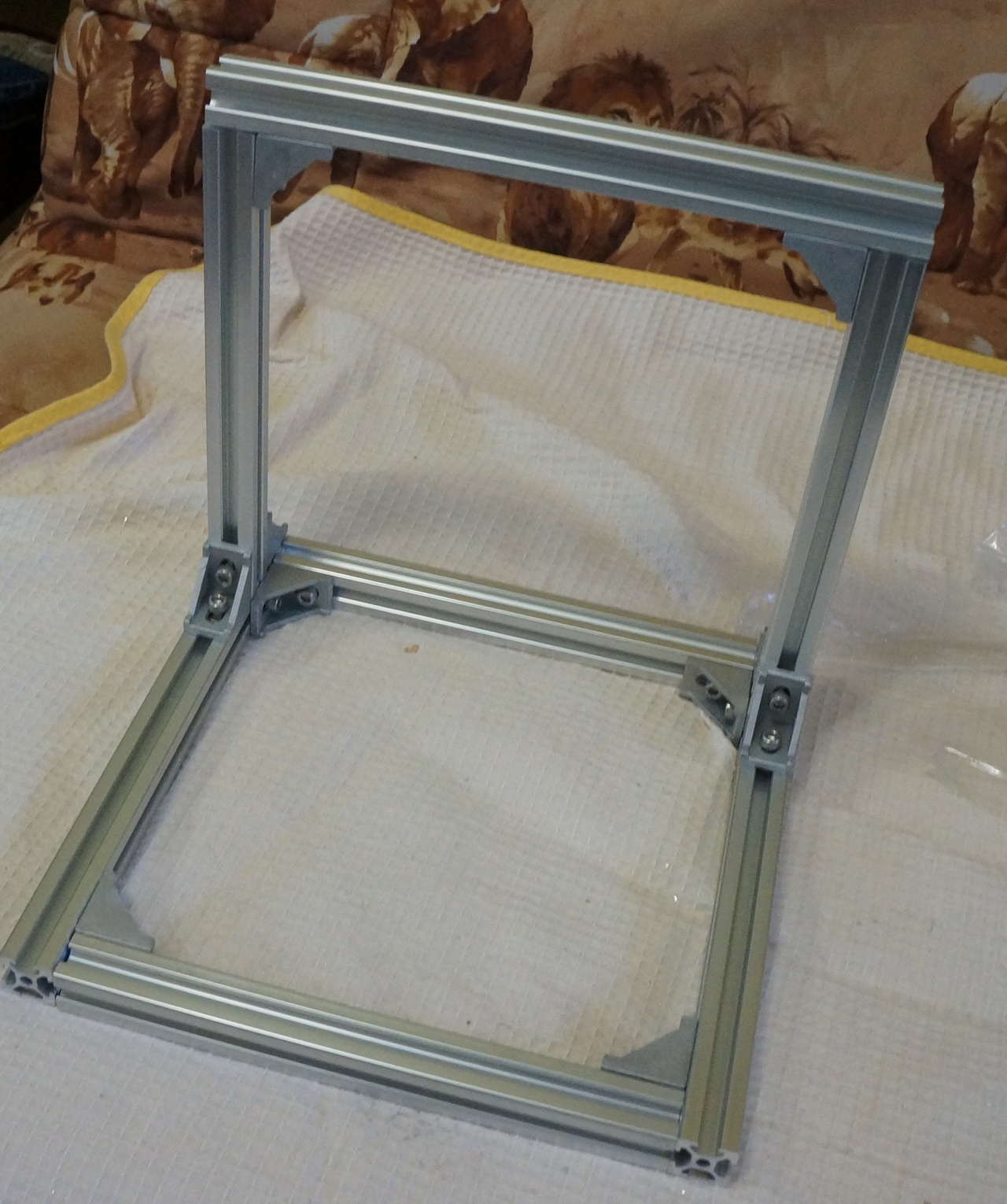
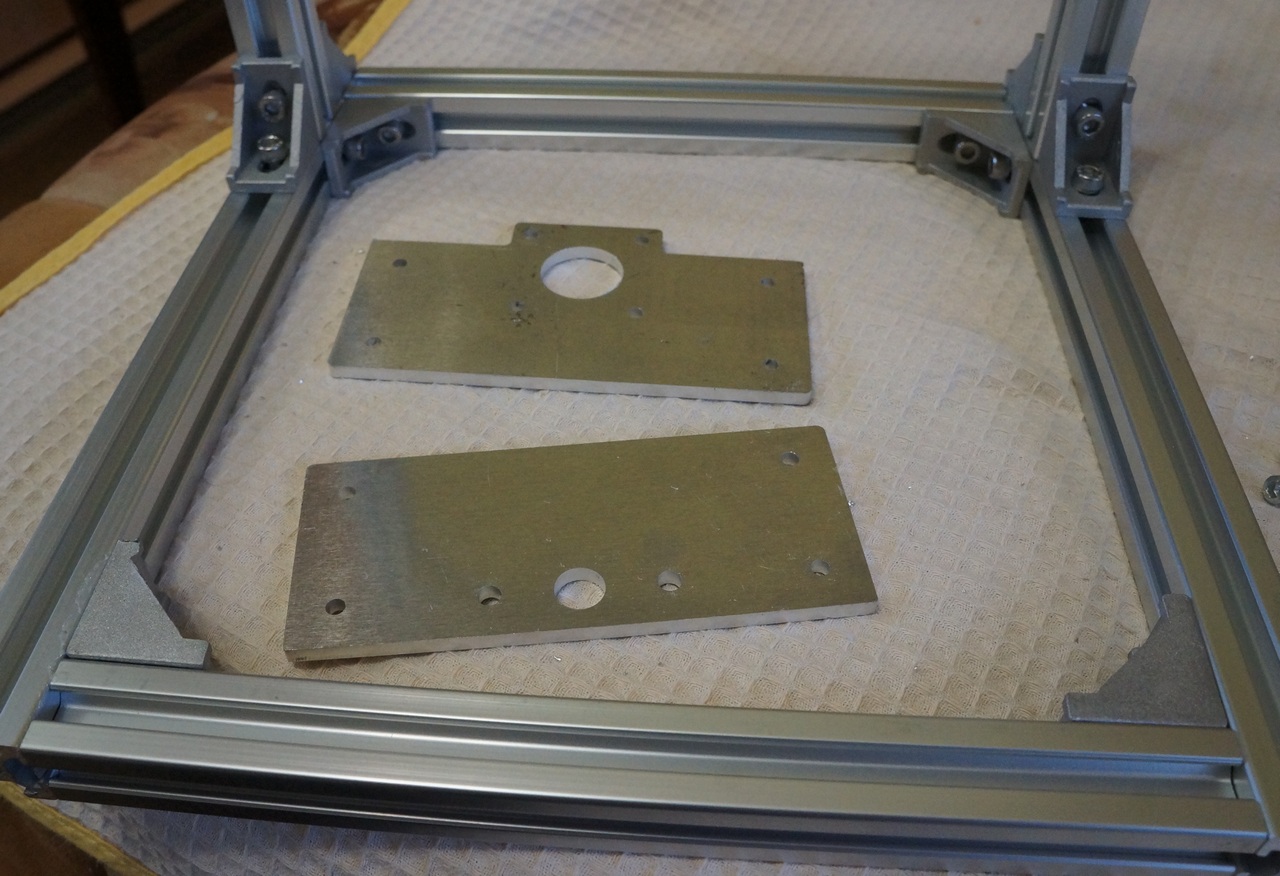
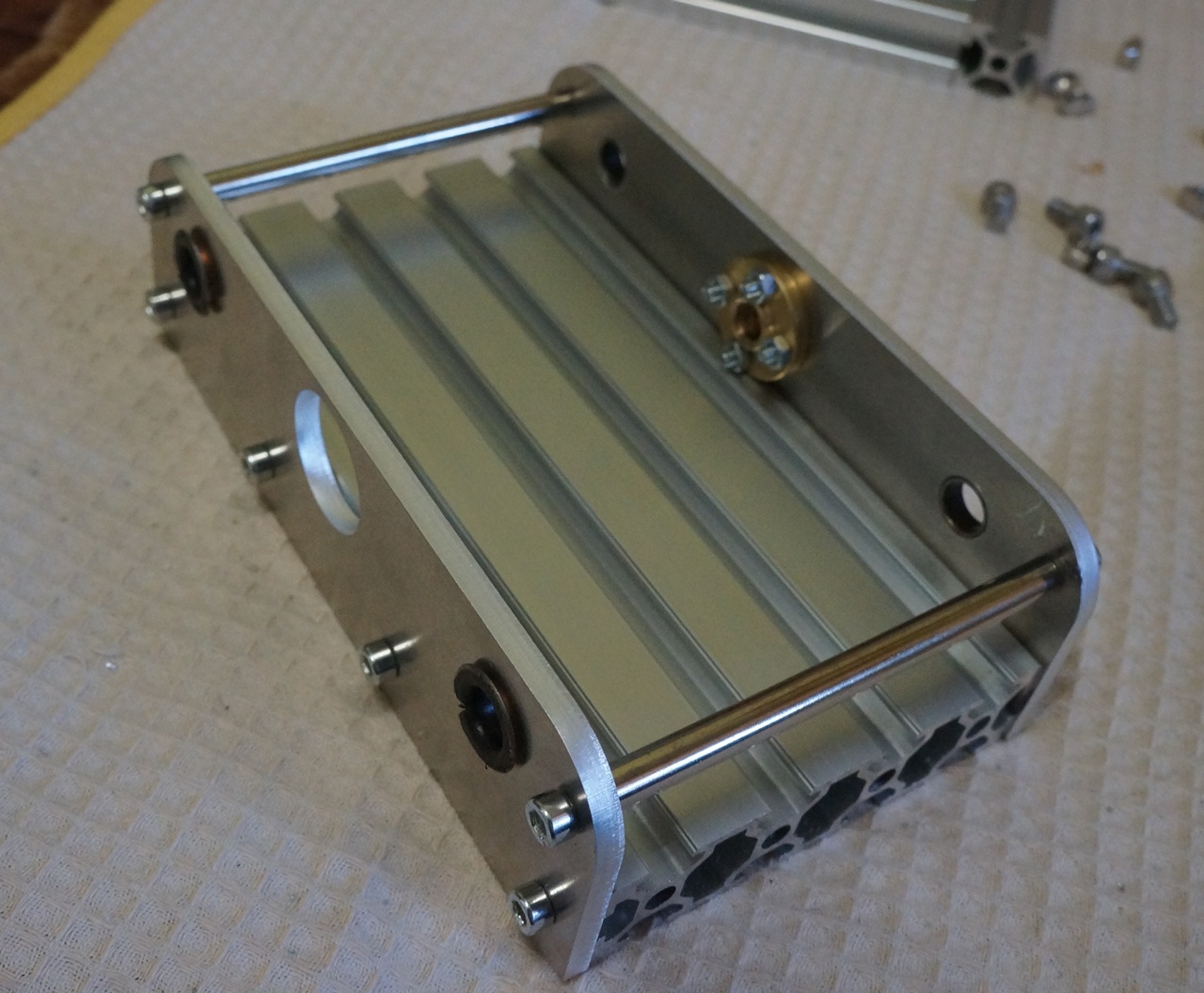
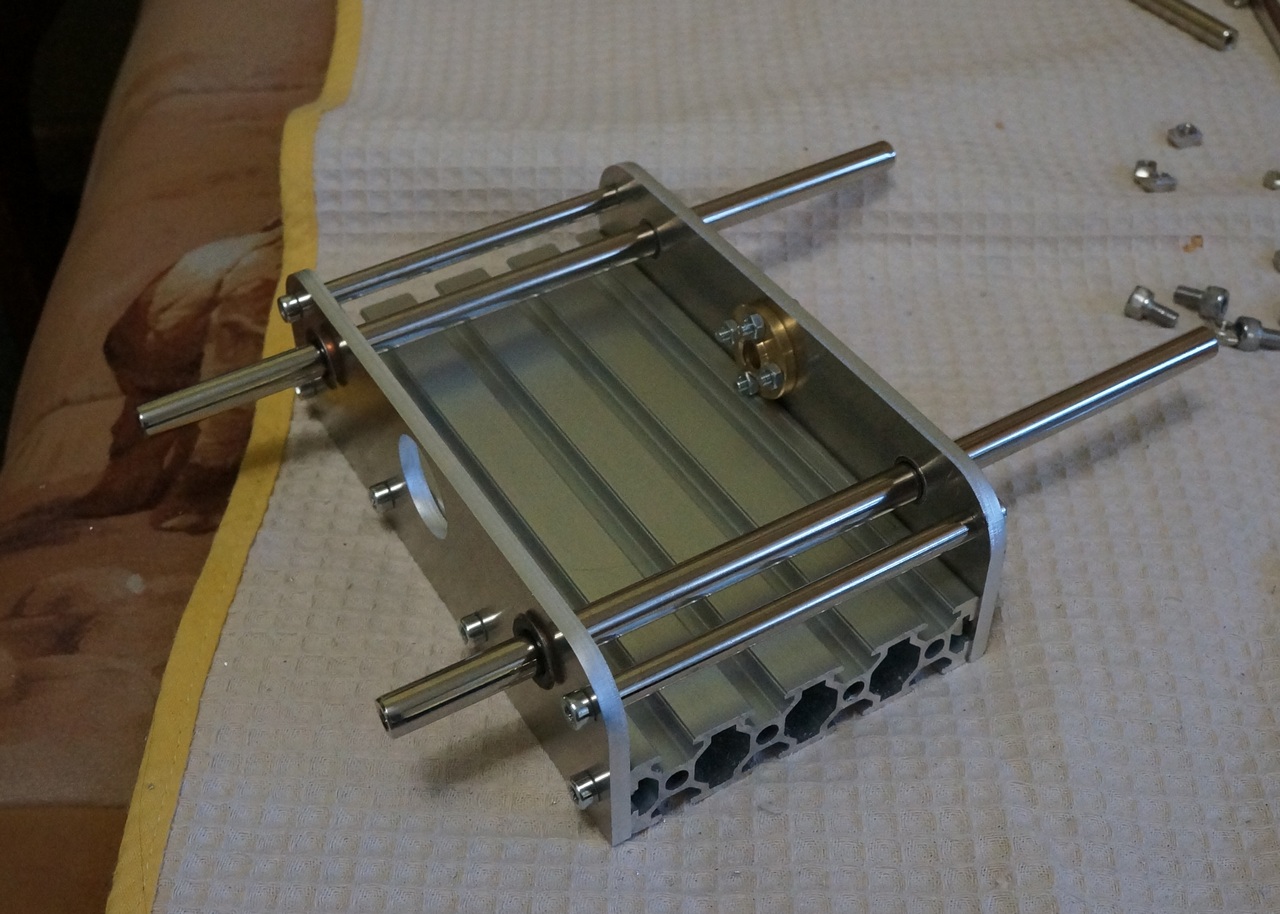
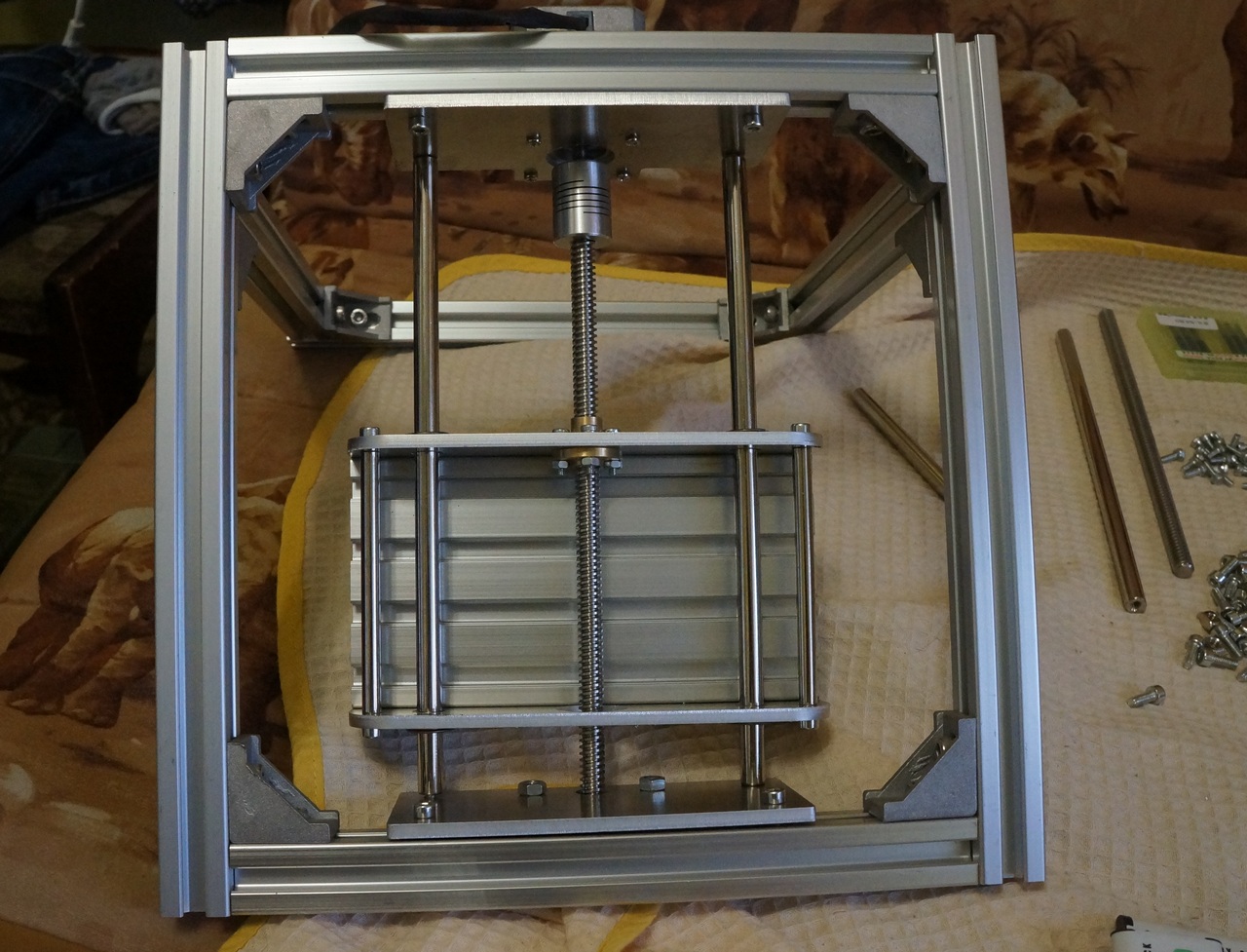
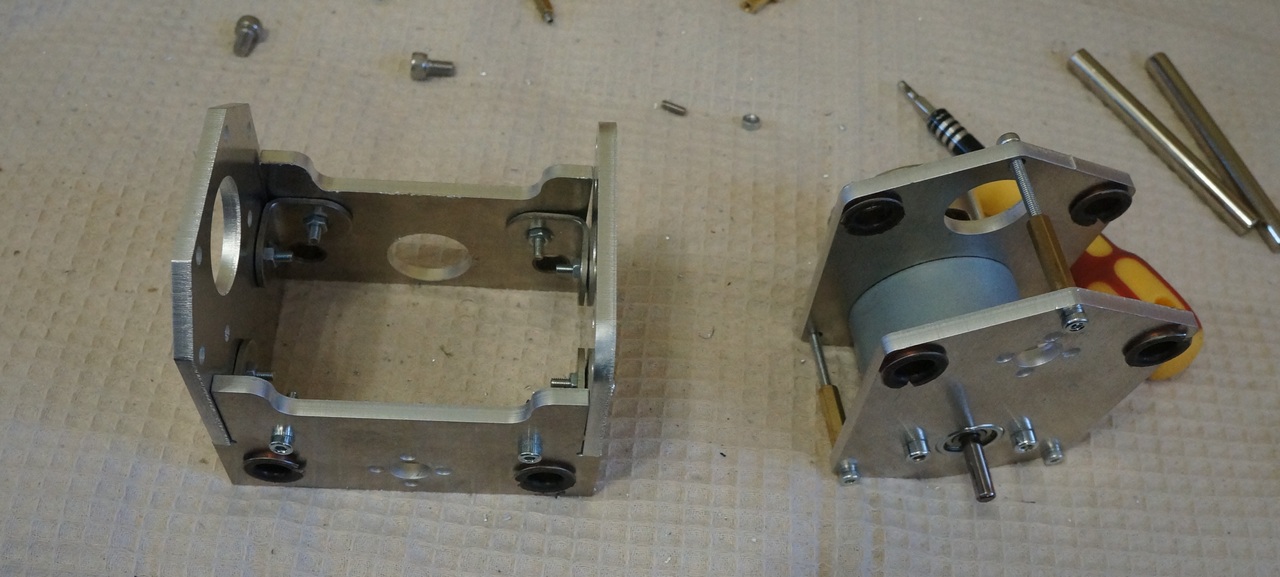
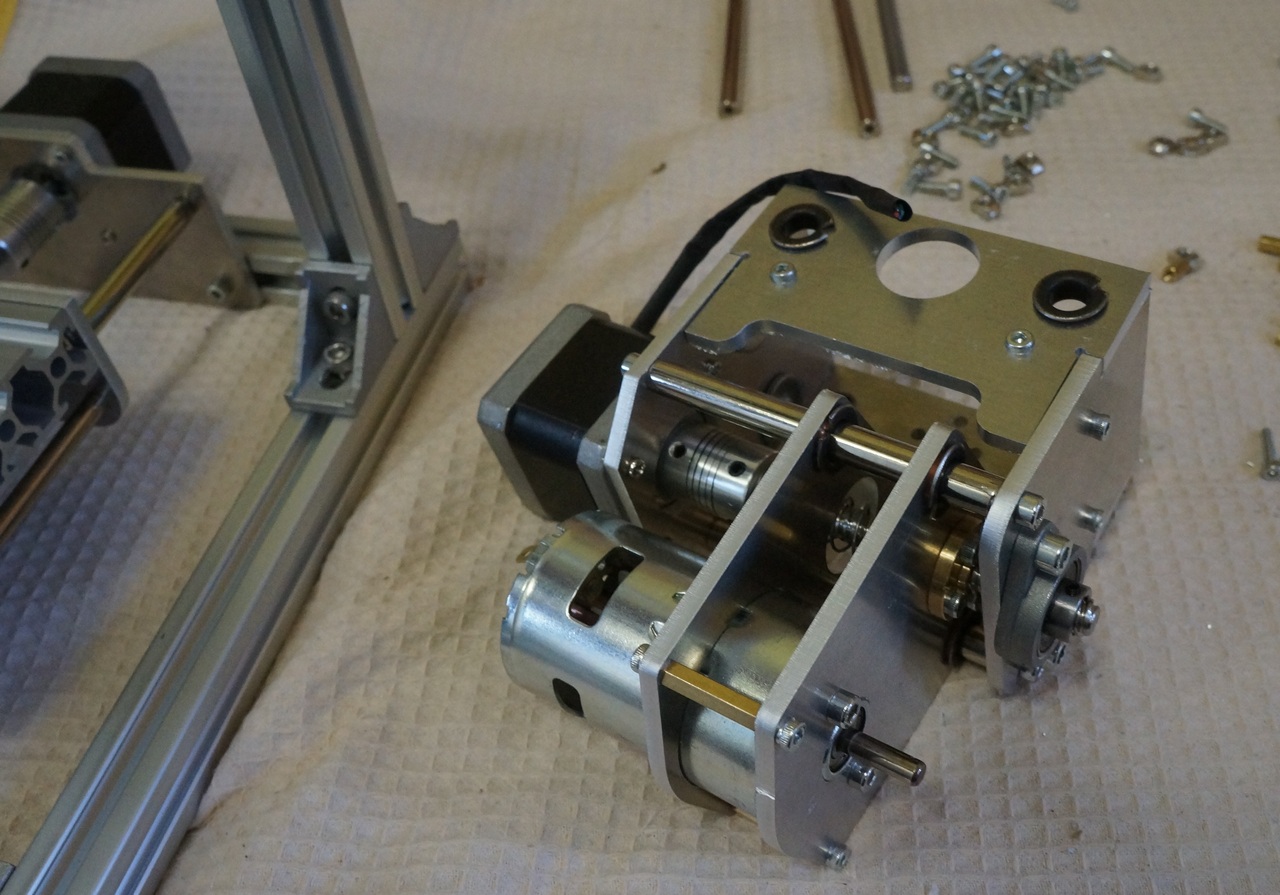
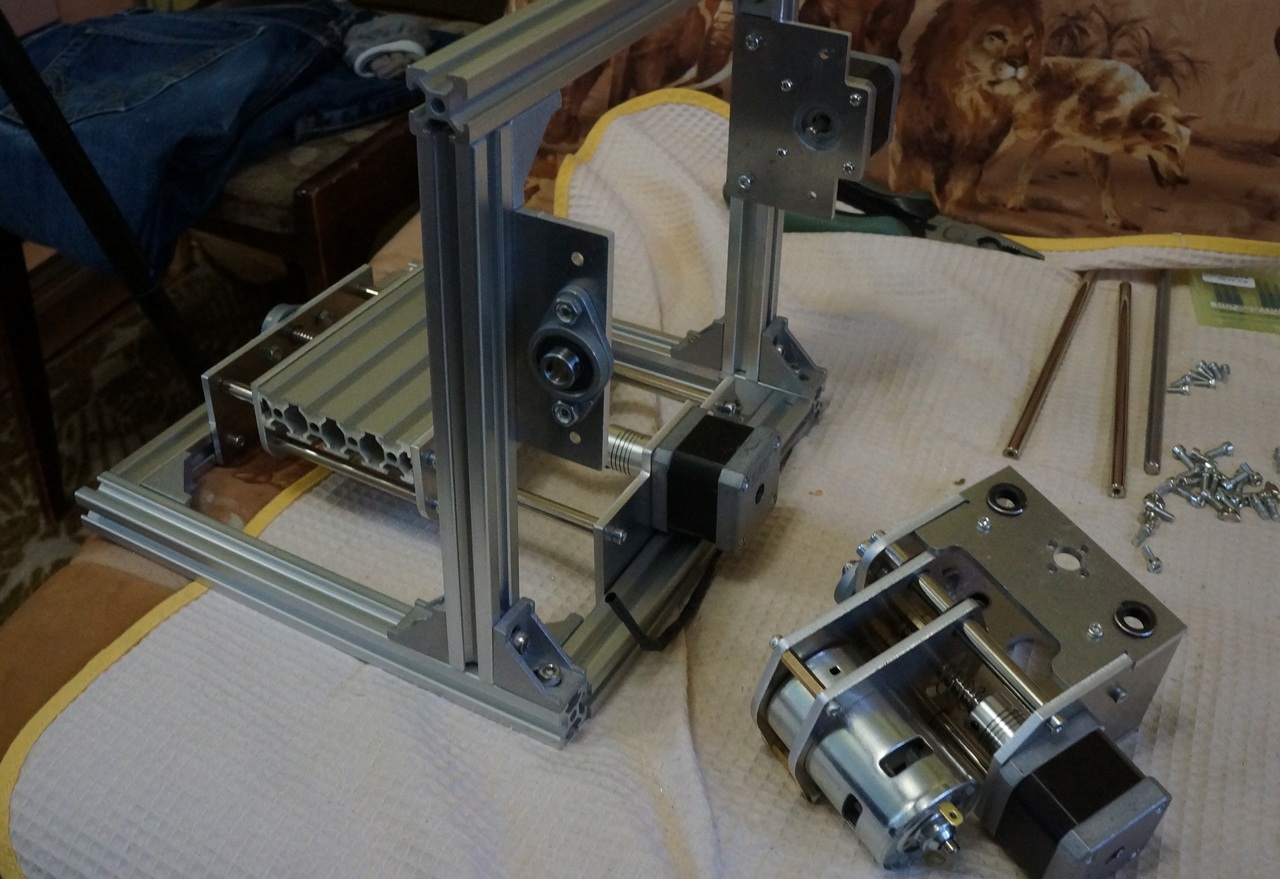
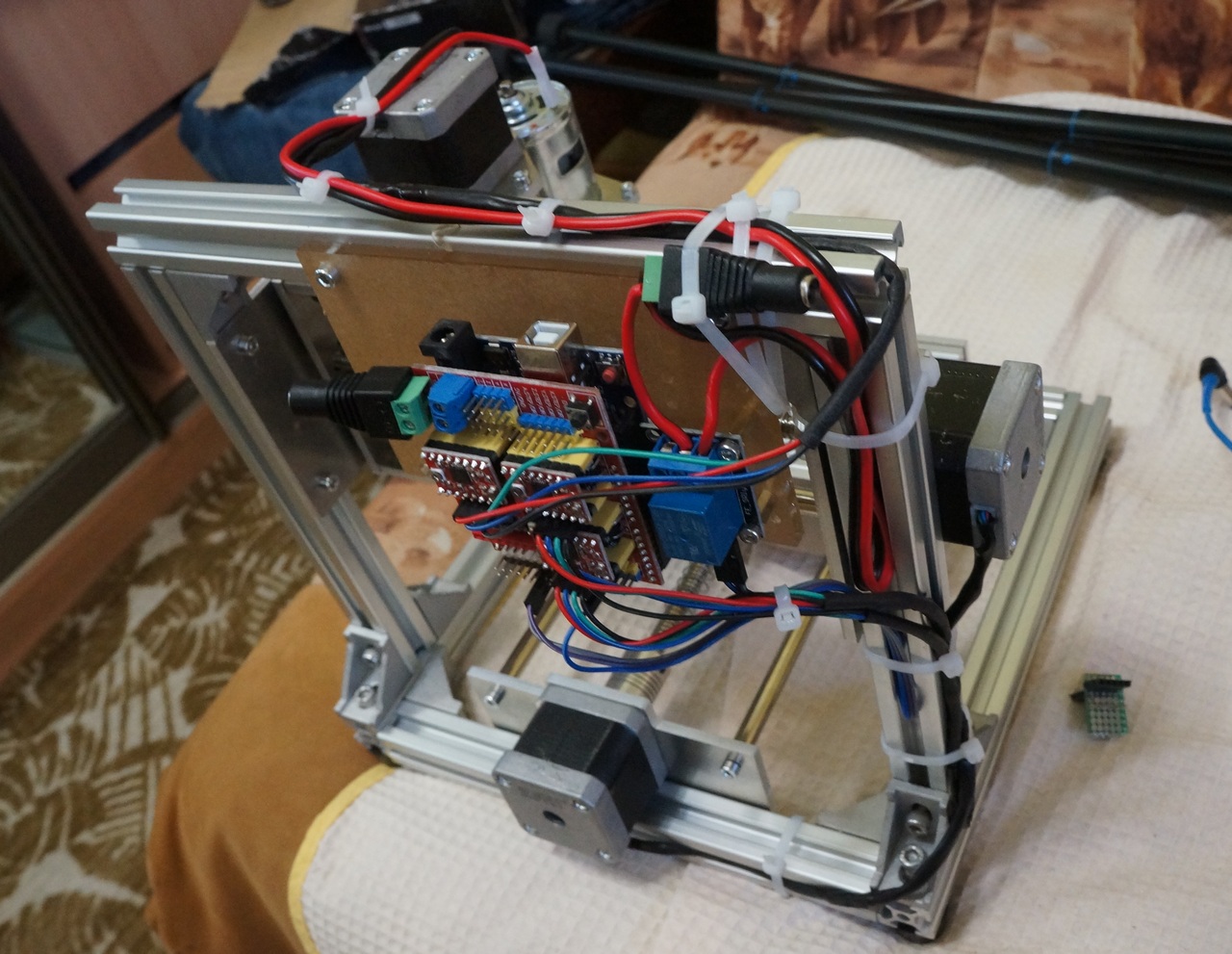
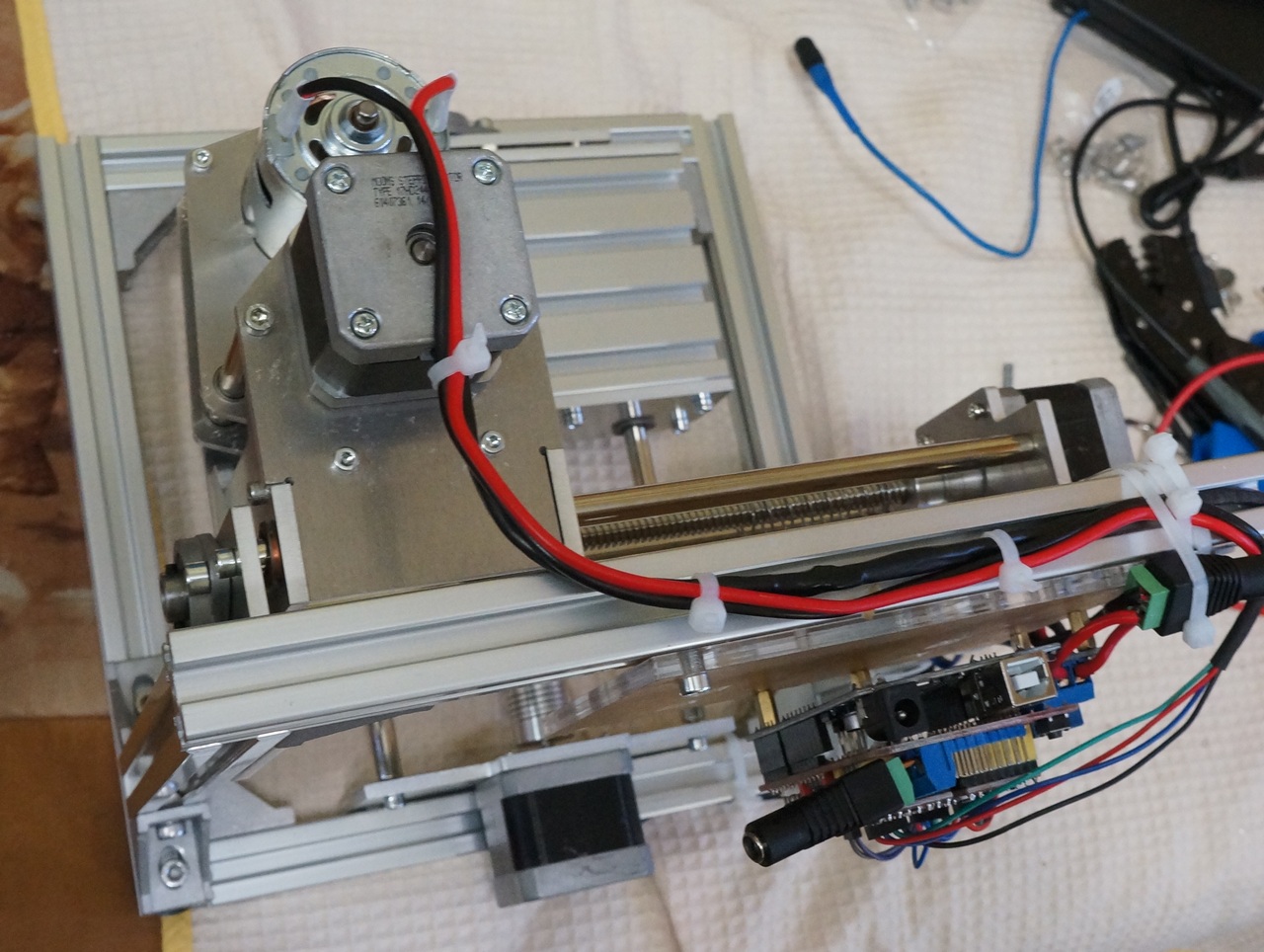
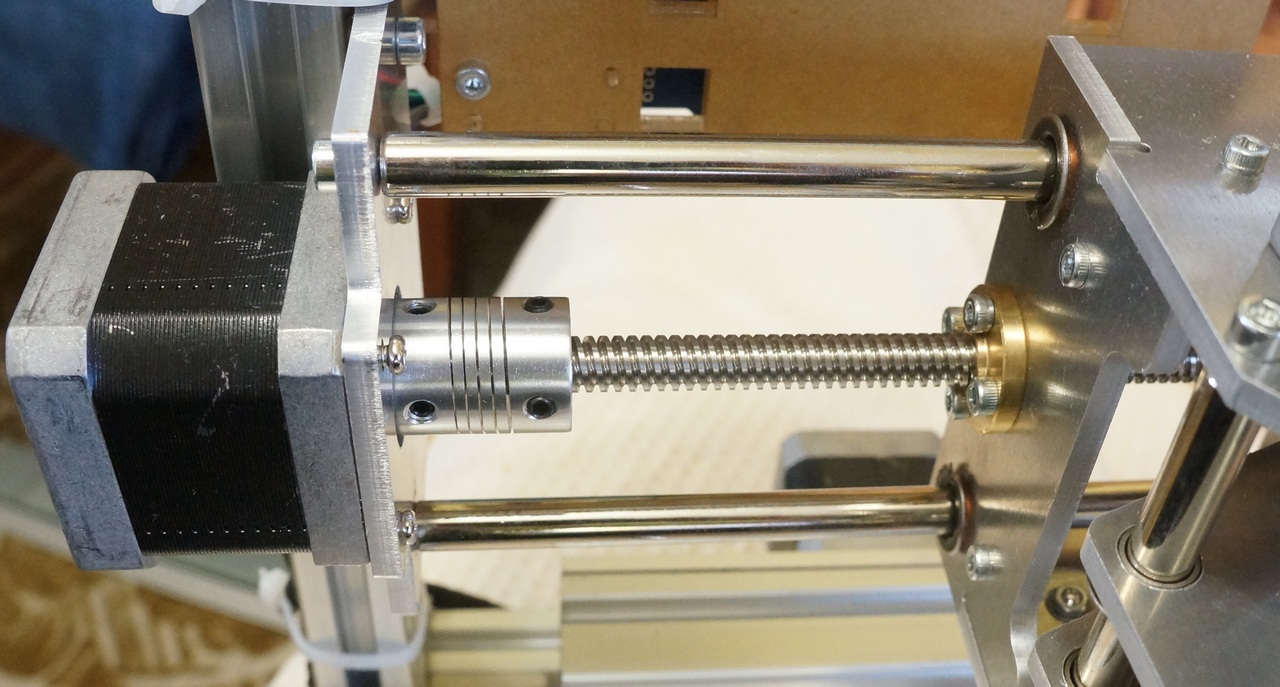
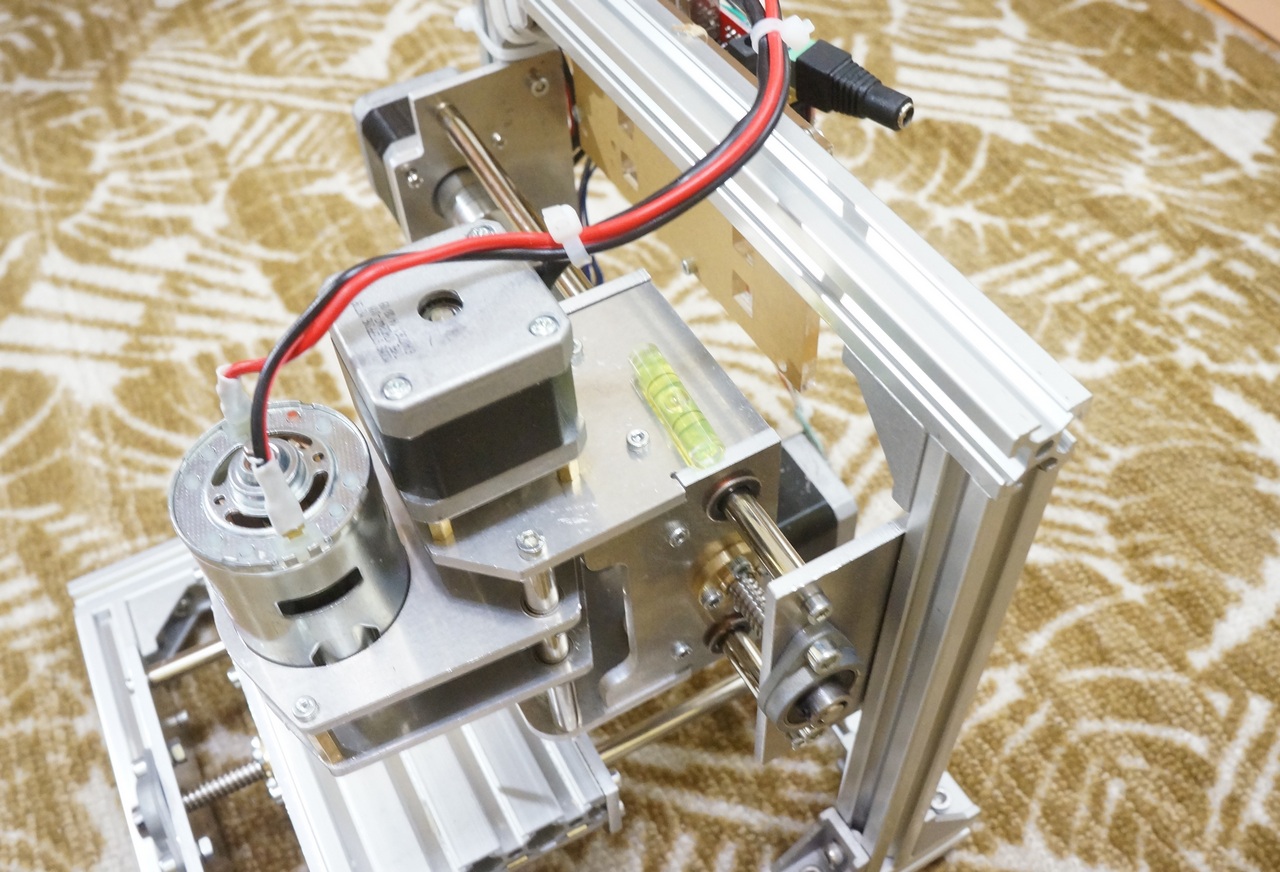
Сборка рамы прошла довольно просто Жесткость соединения мне понравилась Ну что же, дальше — проще. Прикручиваем фланцы Собираем рабочий стол Движение по оси Х осуществляется перемещением стола, по осям Y и Z — перемещением шпинделя Собираем крепление мотора Ну вот. Механика станка приближена к виду на картинке, хотя ход составляет примерно 70x70x25, но с этим буду разбираться позже.
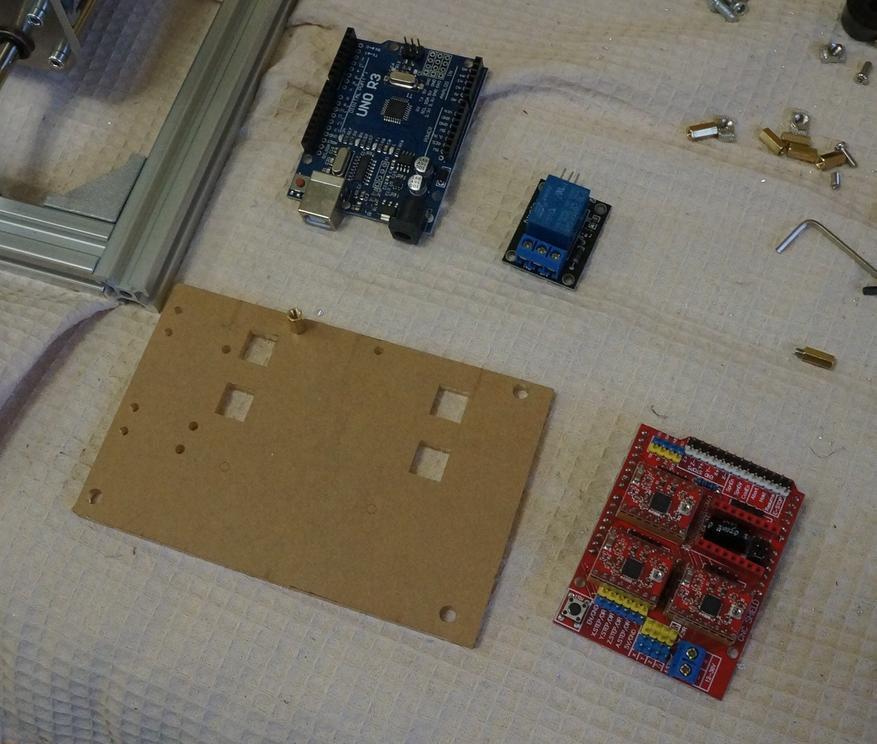
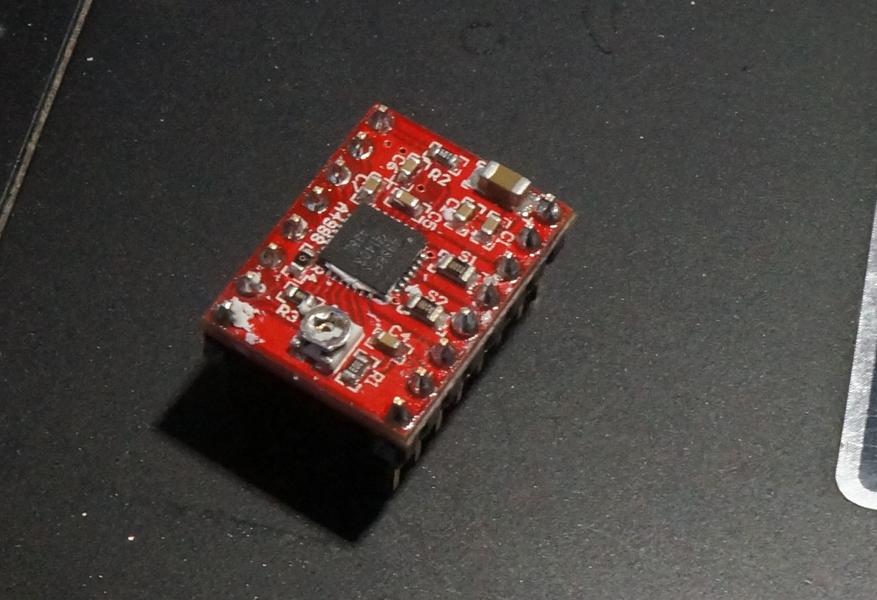
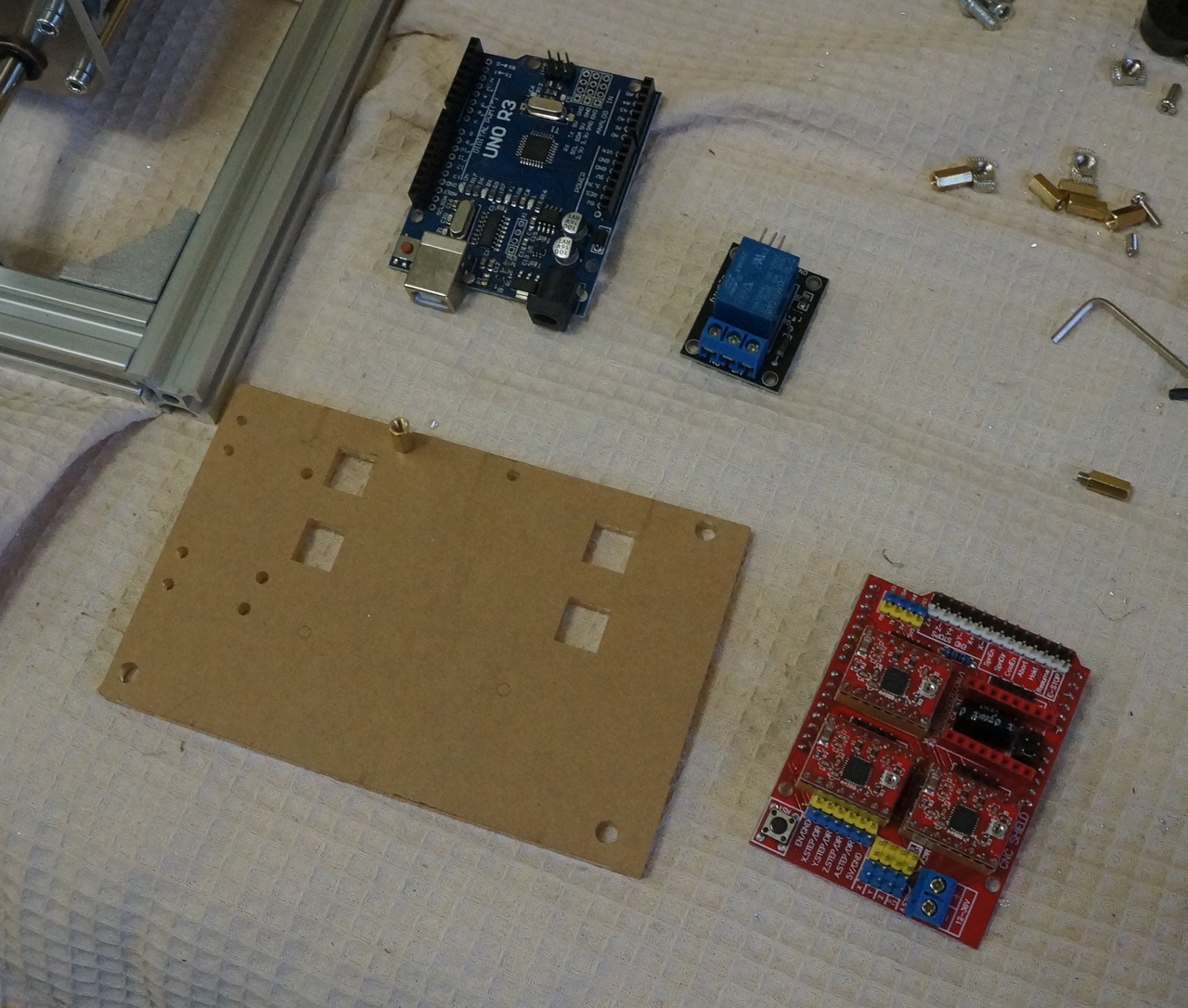
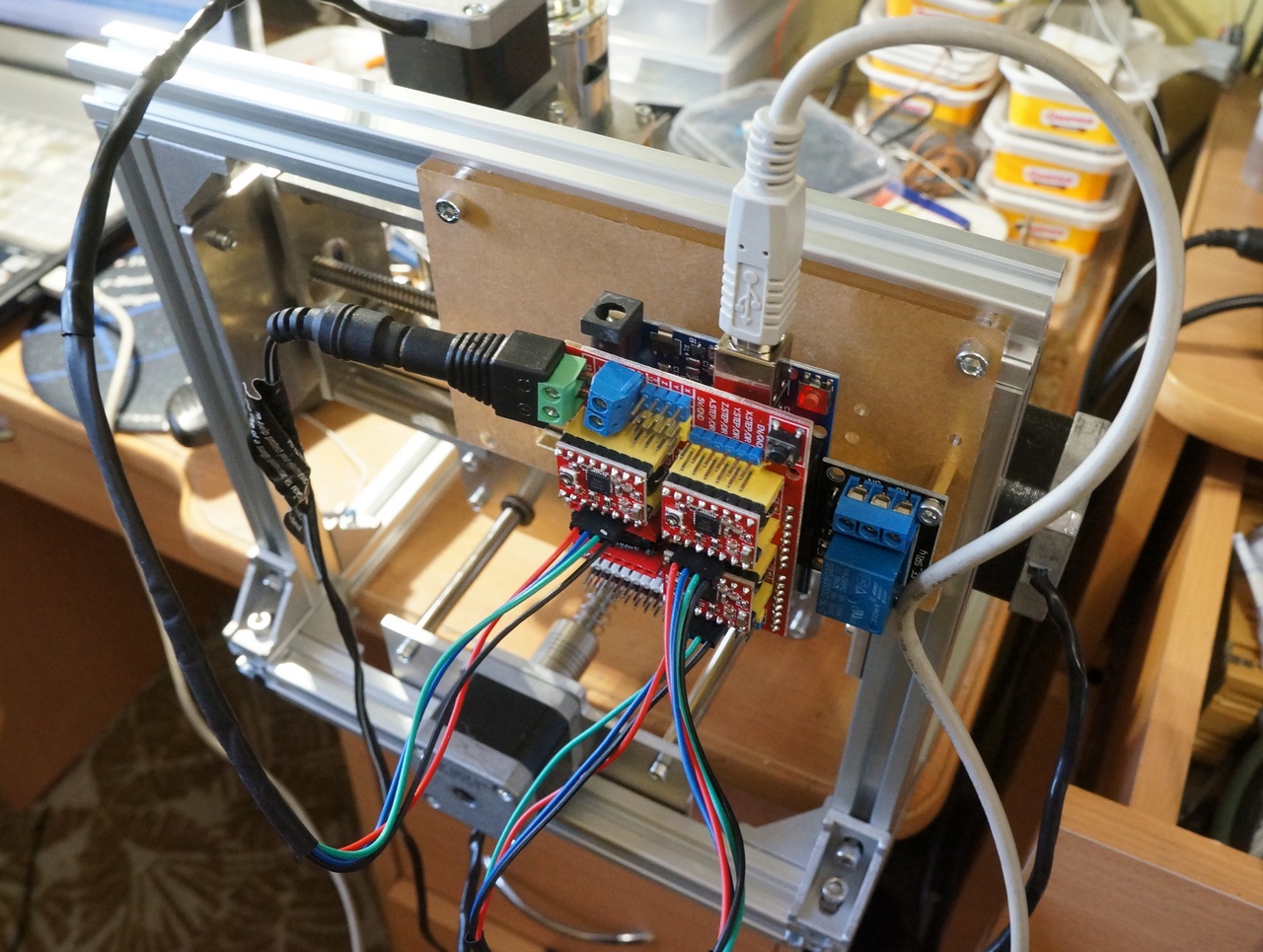
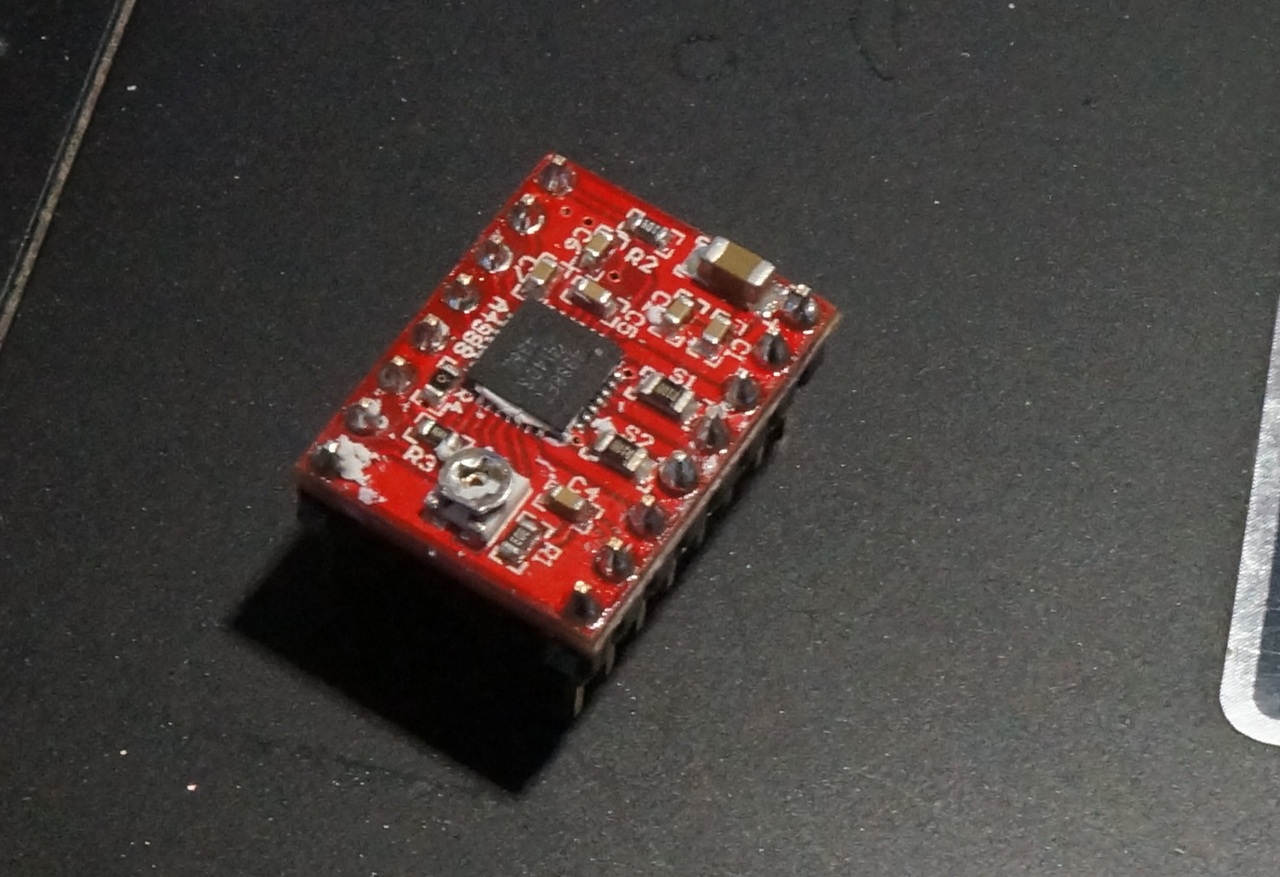
КонтроллерУправлением станка занимается обычный Arduino UNO со специальным «шилдом», к которому подключаются шаговики. Шпиндель включает обычный модуль реле Шилд предназначен для управления перемещениями по 4-м осям в 3D-принтерах, лазерных граверах и фрезерах. В моей комплектации шилд оснащен только тремя драйверами двигателей.
Подробное описание этой платы нашел в интернете
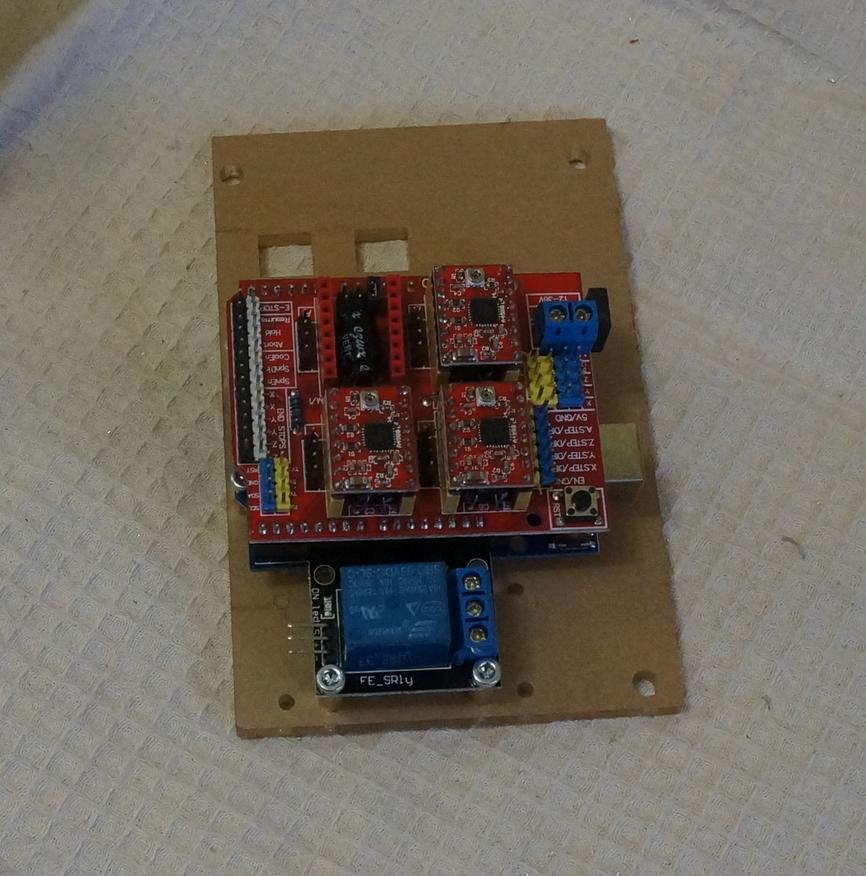
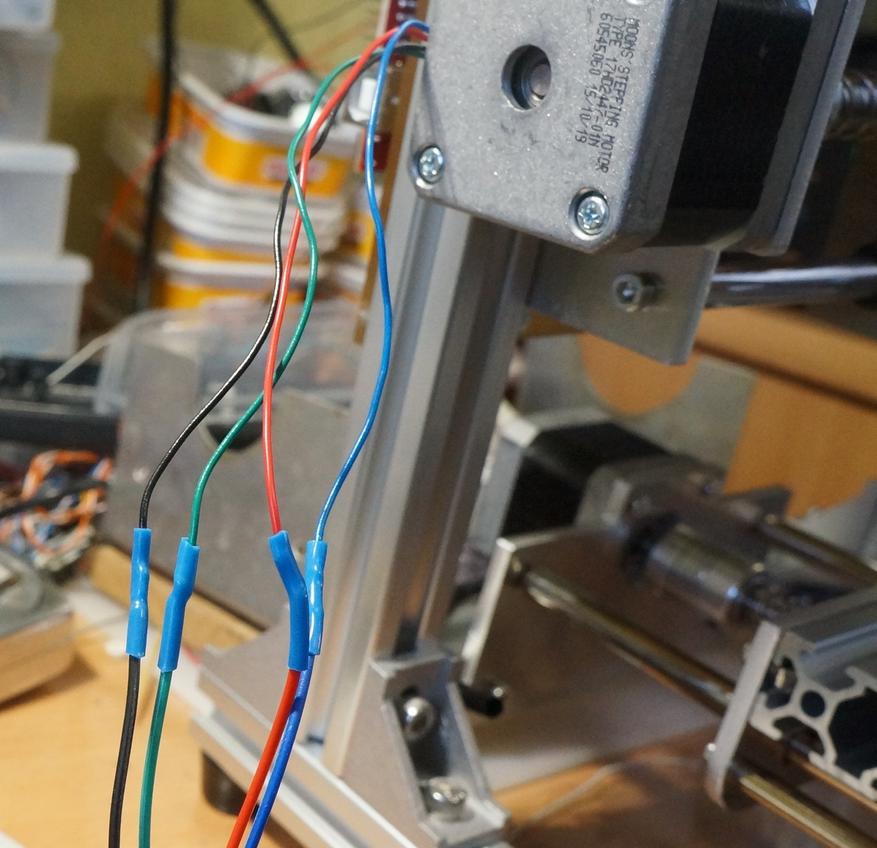
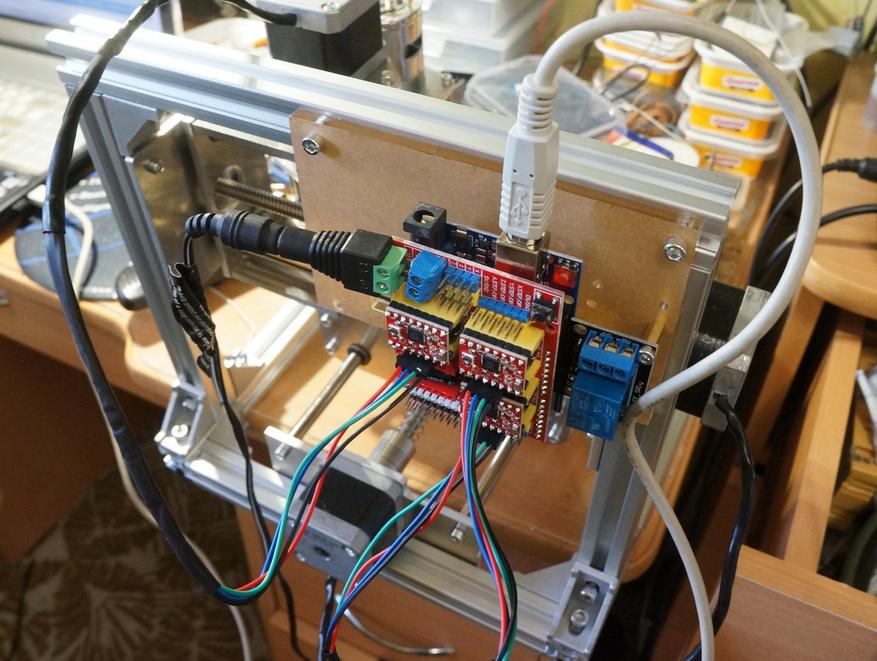
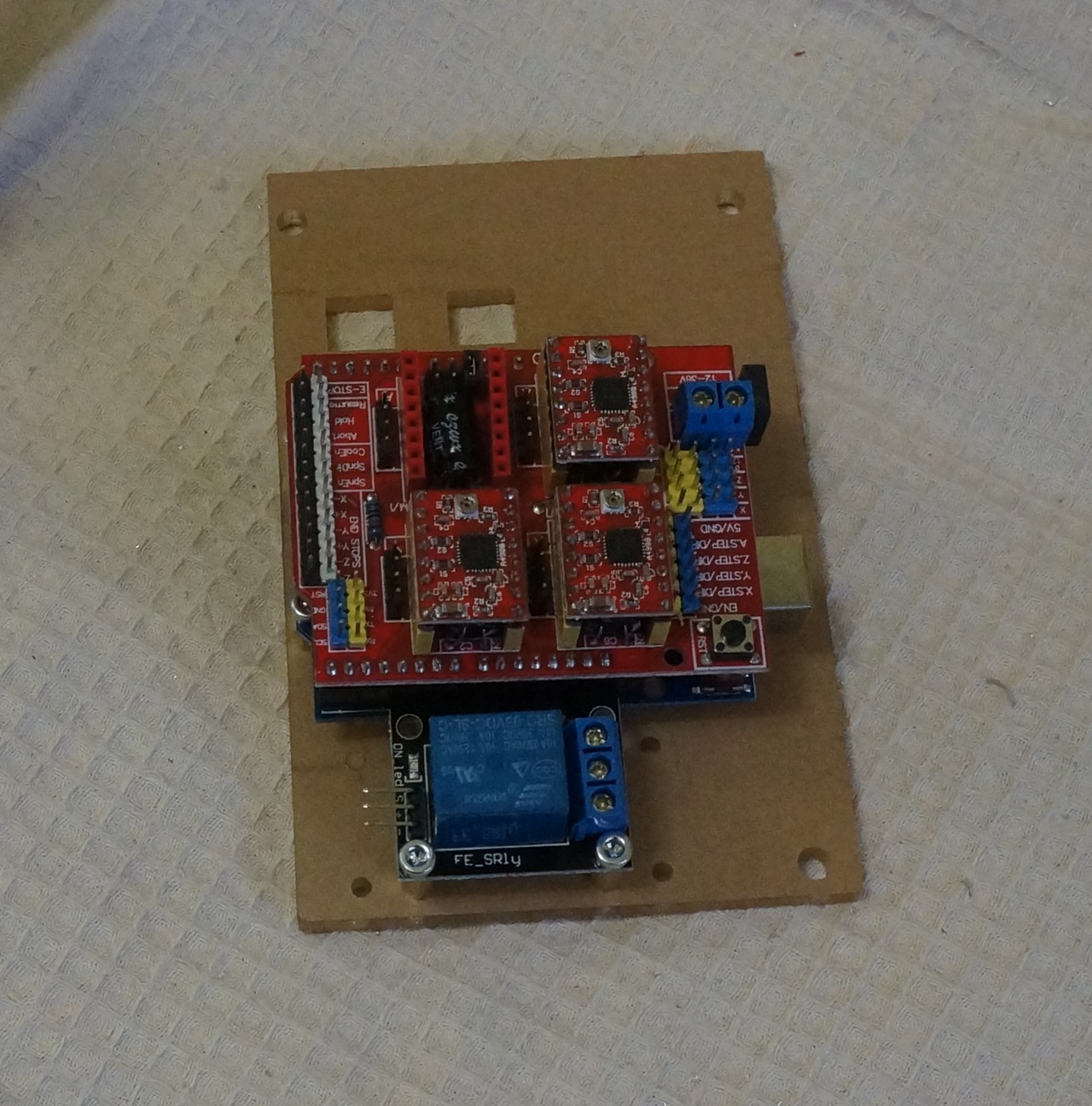
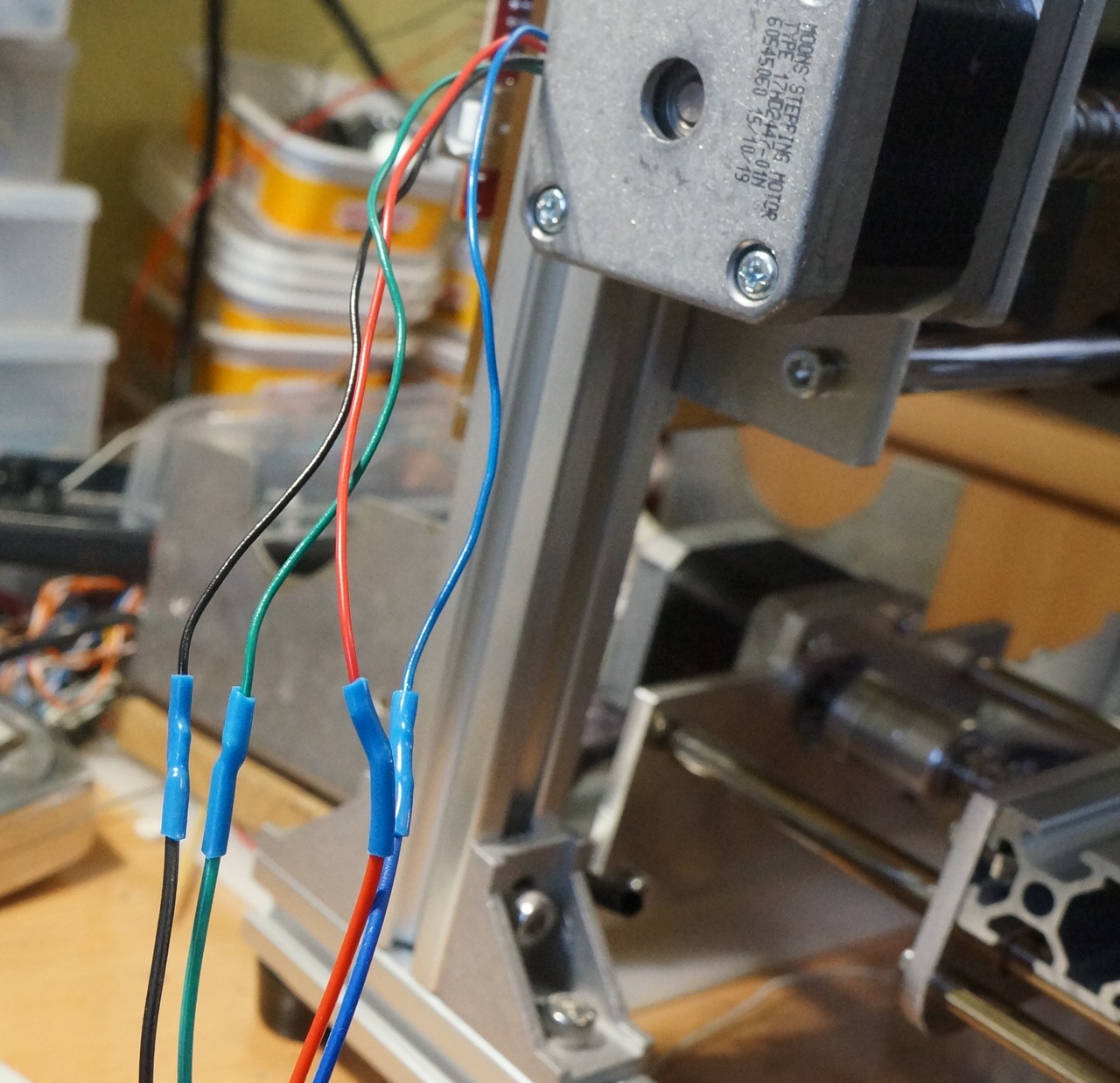
Для крепления платы служи единственная неметаллическая деталь станка. Подключение прошло довольно просто. Собираем контроллер и модуль реле на плате (благо готовые отверстия ля этого имеются) Провода шаговых двигателей удлиняем при помощи цветных проводов с разъемом на конце, идущих в комплекте Реле ставим для коммутации мотора и БП 24В и подключаем проводками, идущими в комплекте. Мотор шпинделя подключаем мощным проводом при помощи обжимных контактов, которые тоже идут в комплекте. Разъемы для блоков питания закрепляем на корпусе Пока занимался подключением, пришло письмо с технической поддержки GERBESTа, в котором были указаны ссылки все на те же файлы, только перезалитые на Гугл-диск
И видео с гордым названием «Assembly Instructions», в котором китаец под приятную музыку и с титрами на их родном языке собирает данный станок. https://youtu.be/YPw8h4H-hBo
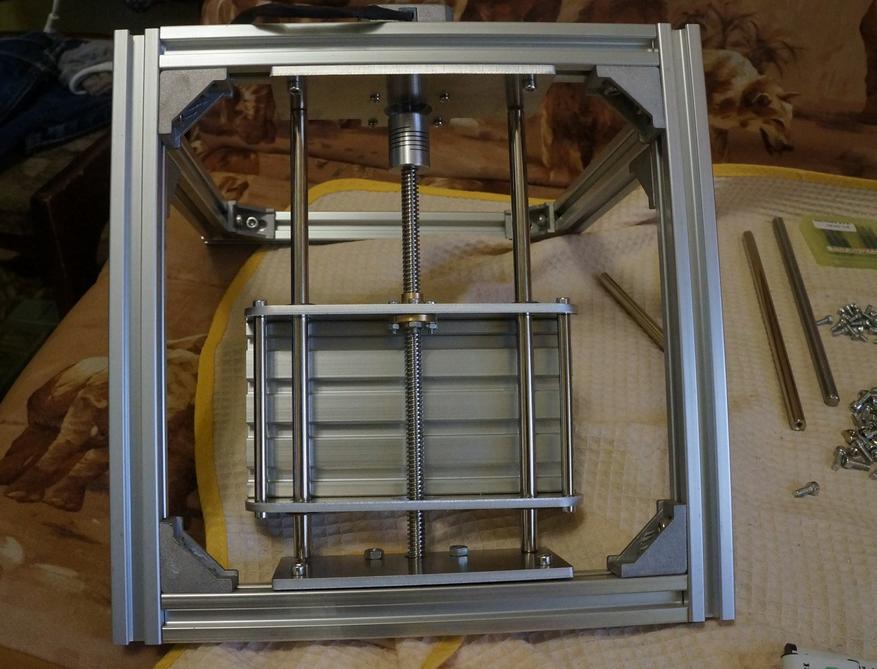
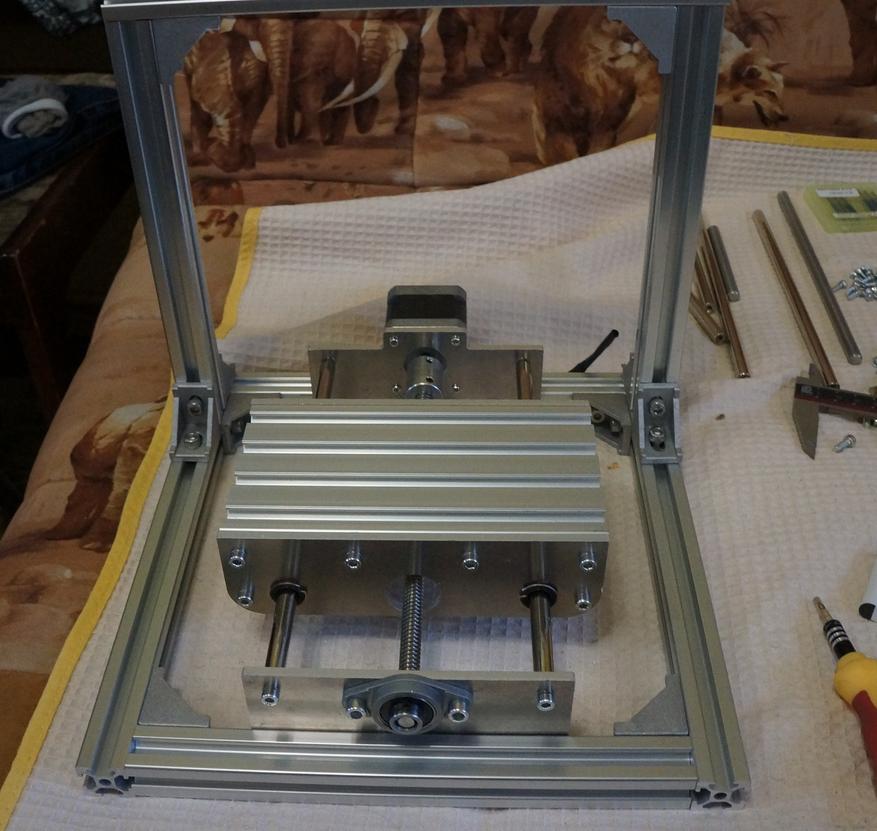
Просмотр показал, что несколько деталей я собрал не так, из за этого и маленький ход по осям
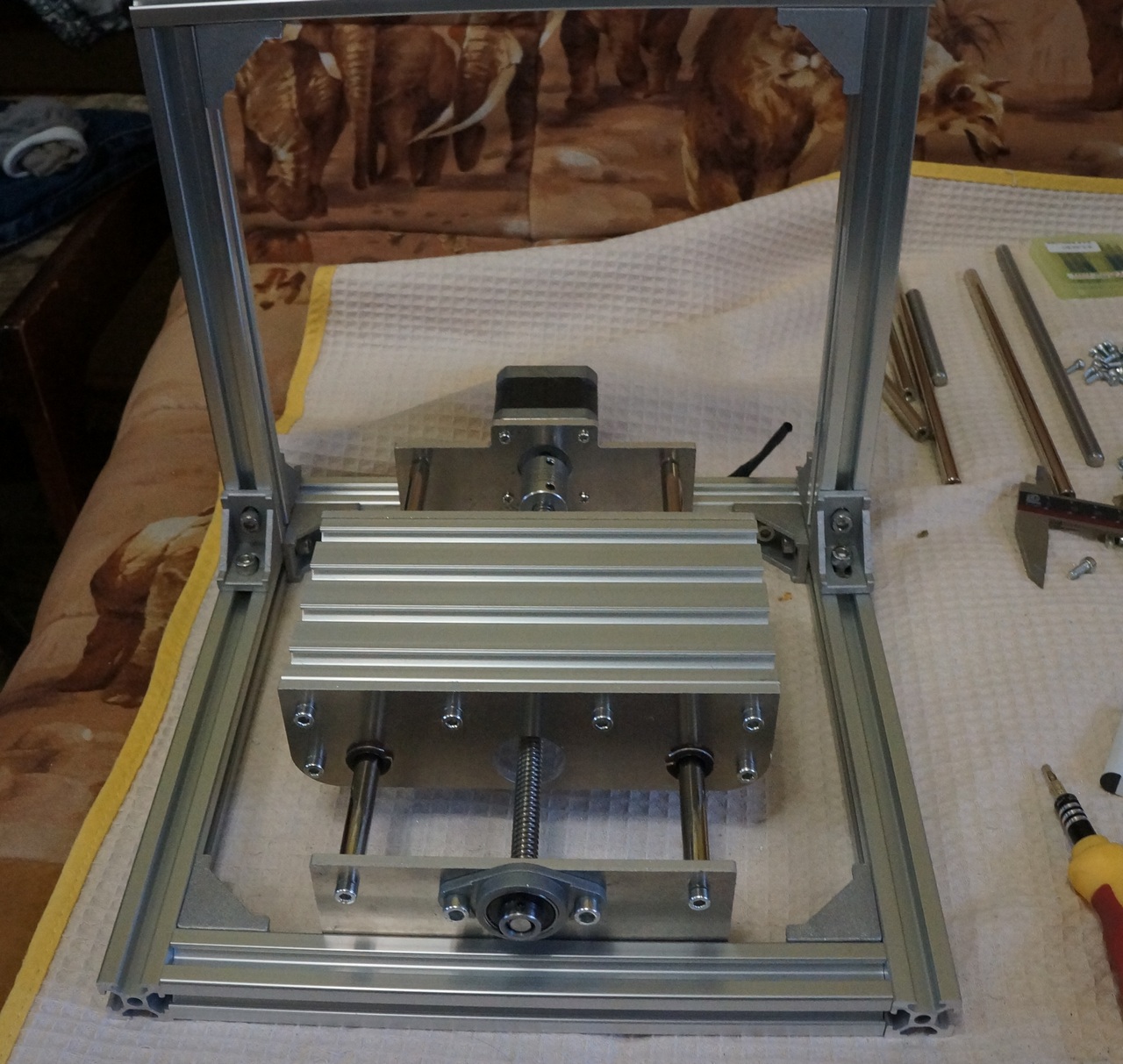
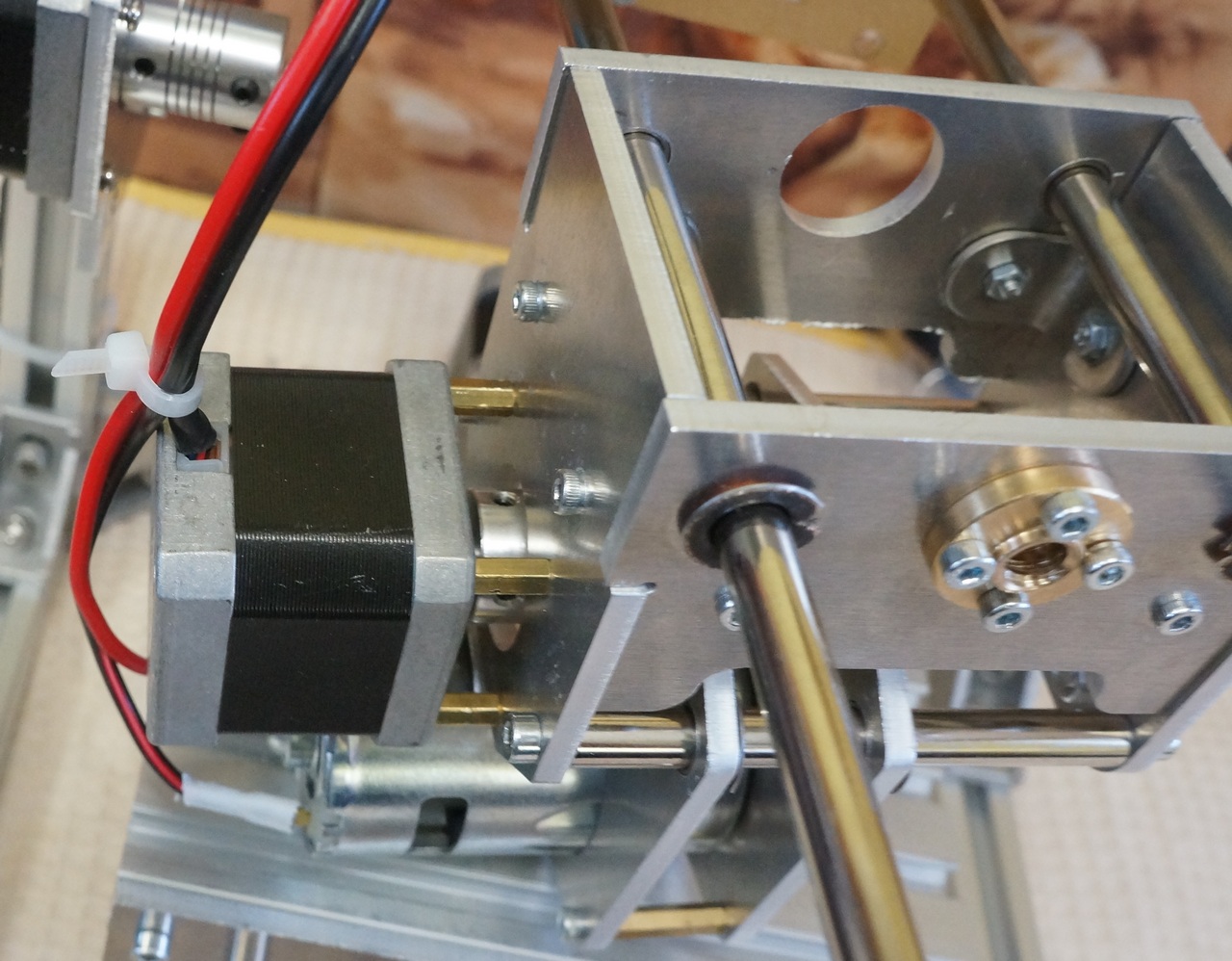
Быстро переделываем наш станок, как на видеоДвигатель по оси Z поднимаем на втулки После этого ход по осям составил заявленные 130х110х45мм
Пуско-наладкаПодключив Ардуино к компьютера, на USB/COM порту на скорости 115200, я увидел приглашение:
К использованию мощных управляющих программ типа MATH3 я пока не готов, ставлю простейшую программку GRBL CONTROLLER
В окошке управления осями получаю работу шаговых двигателей. Правда на команду 10мм получаю реальный сдвиг на 20мм. Видимо данные настройки рассчитаны на другую шпильку
Устанавливаю шаг моторов:
Вот в общем то и все. Галочка «Spindle On» приводит к срабатыванию реле и включению мотора шпинделя.
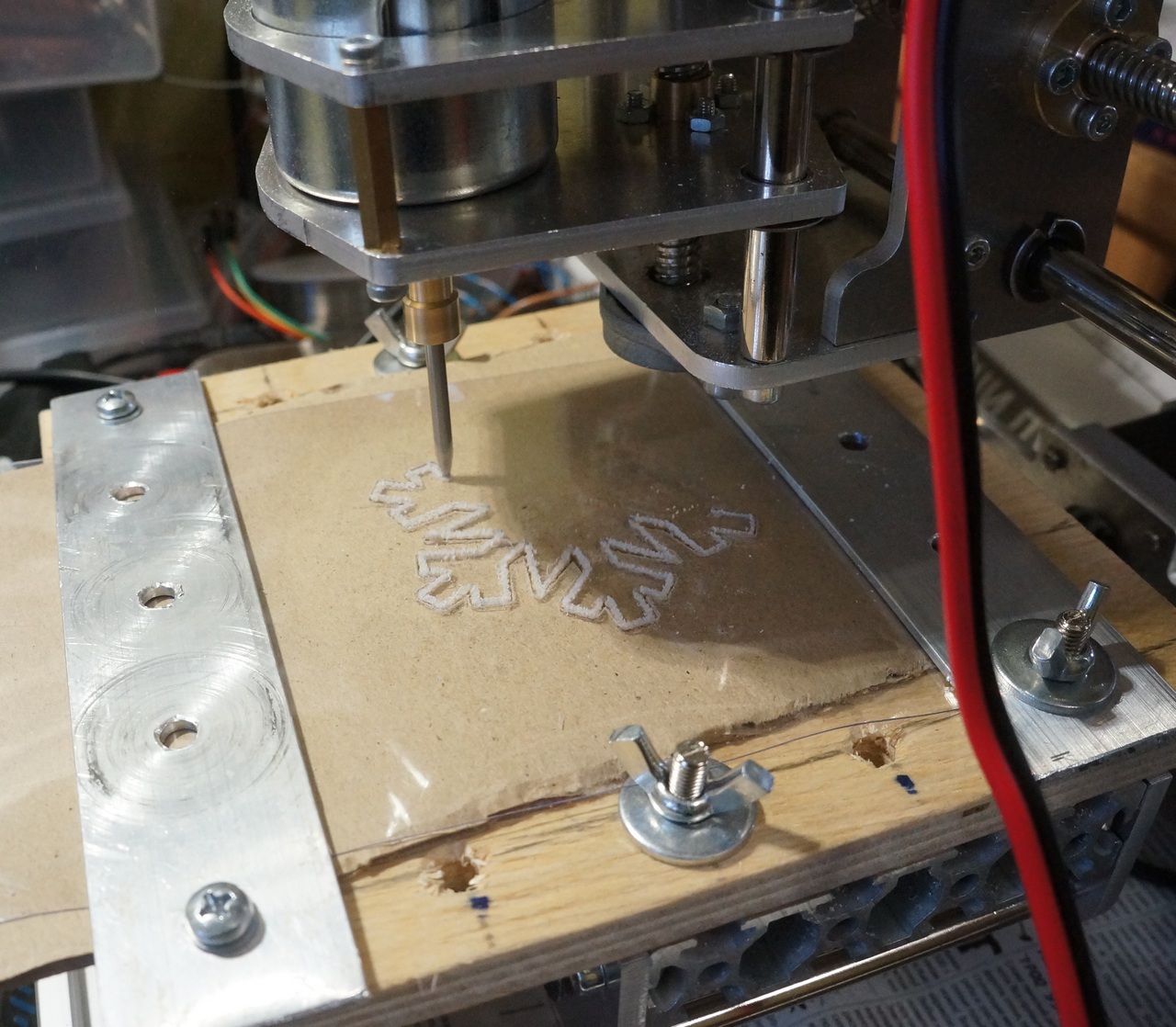
Загружаю из китайского архива первый пример и… ломаю кончик первой фрезу (((. Перемещение по оси Z с максимальной скоростью ниже уровня стола. Значит пора разбираться G-кодом и его получением. Добавляю в станок четыре аппаратные кнопки, который помогают быстро остановить/продолжить работу программы.
Программное обеспечение3D гравировку и изучение программы ARTCAM я отложил в светлое будущее. Основное назначение данного станочка для меня — гравировка и сверловка печатных плат, нарезание отверстий в корпусах приборов и гравировка различных надписей и рисунков. Начну с того, чем я умею пользоваться — CorelDraw и SprintLayout6.
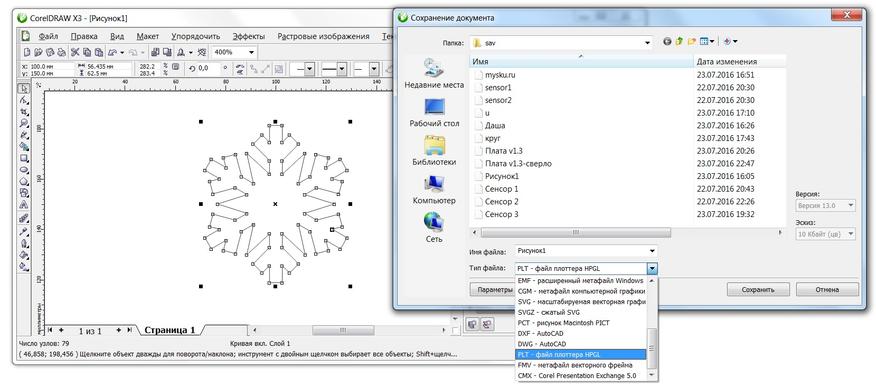
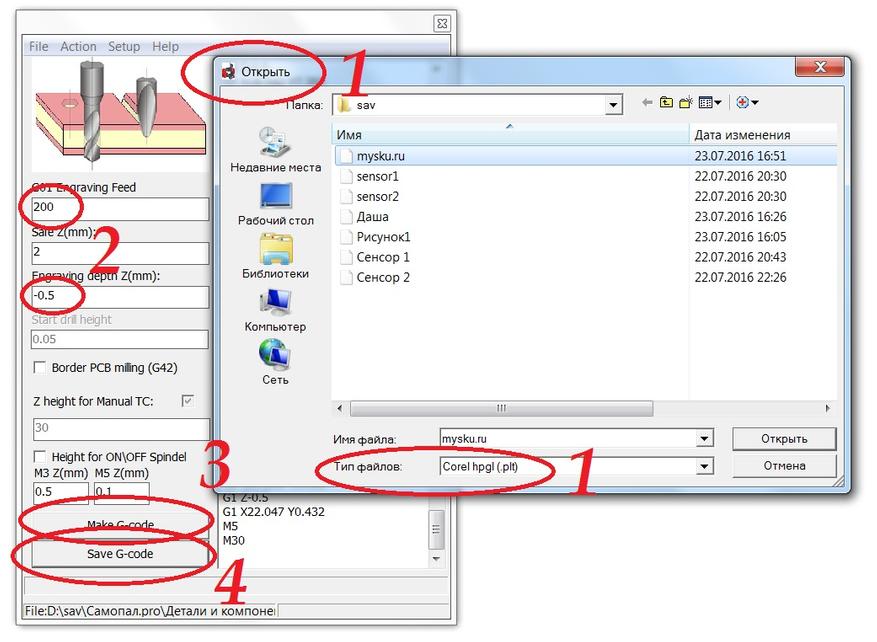
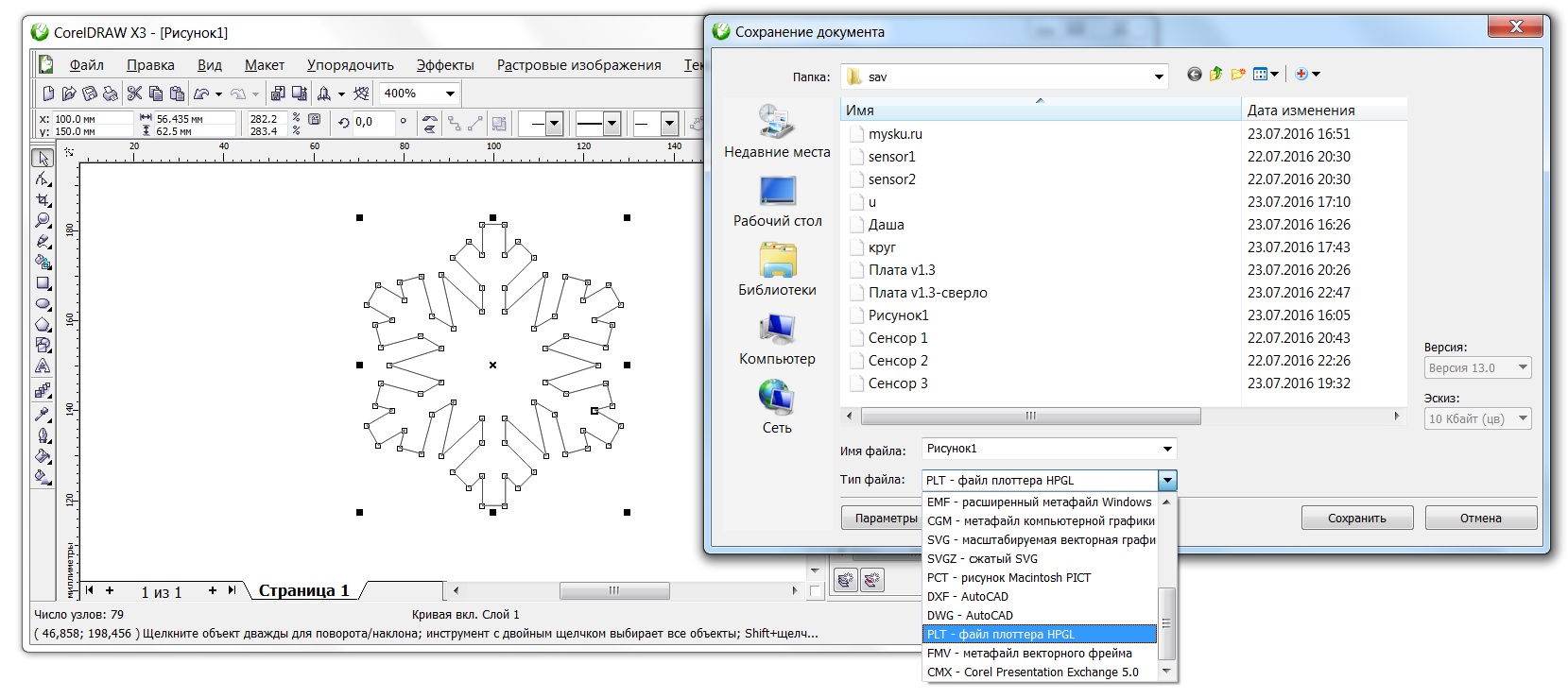
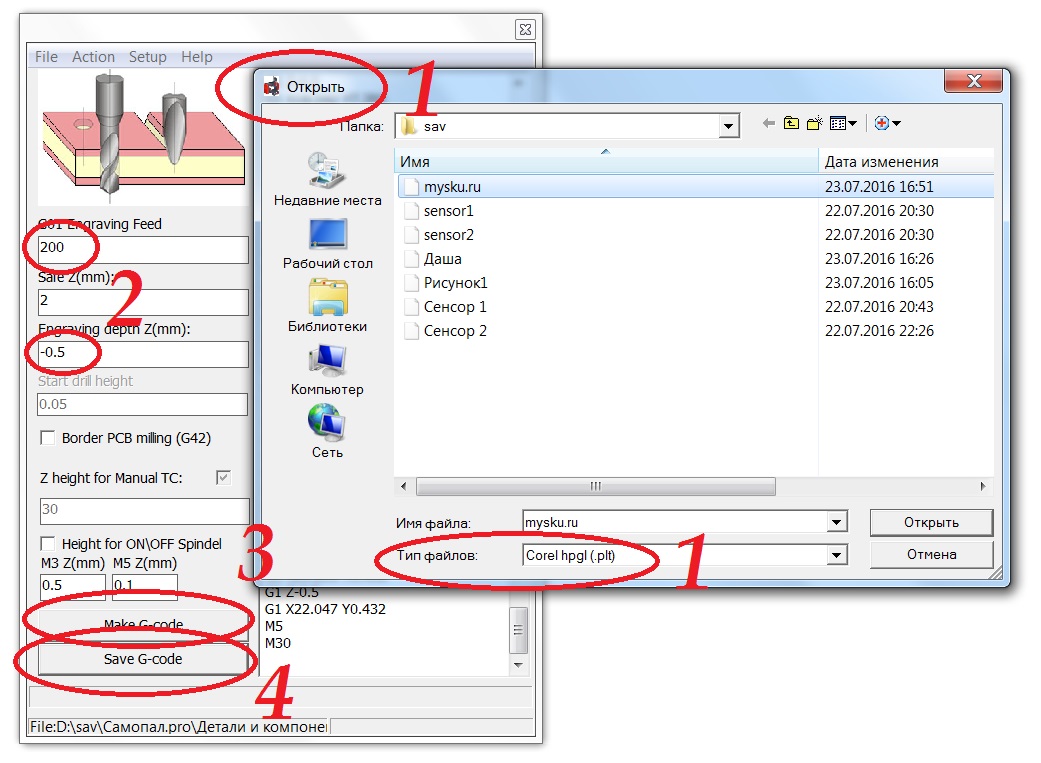
CorelDrawРисуем изображение в кривых и размещаем его в центре документа, а затем сохраняем его в формате файла плоттера HGLT и расширением .plt, Для генерации G-кода нашел простейший конвертер StepCam понимающий форматы CorelDraw, SprintLayout, Autocad и даже BMP
Программа позволяет установить скорость перемещения при резке, глубину реза и некоторые другие параметры и формирует готовый G-код
После чего загружаем сгенеренный файл в GRBL CONTOLLER.
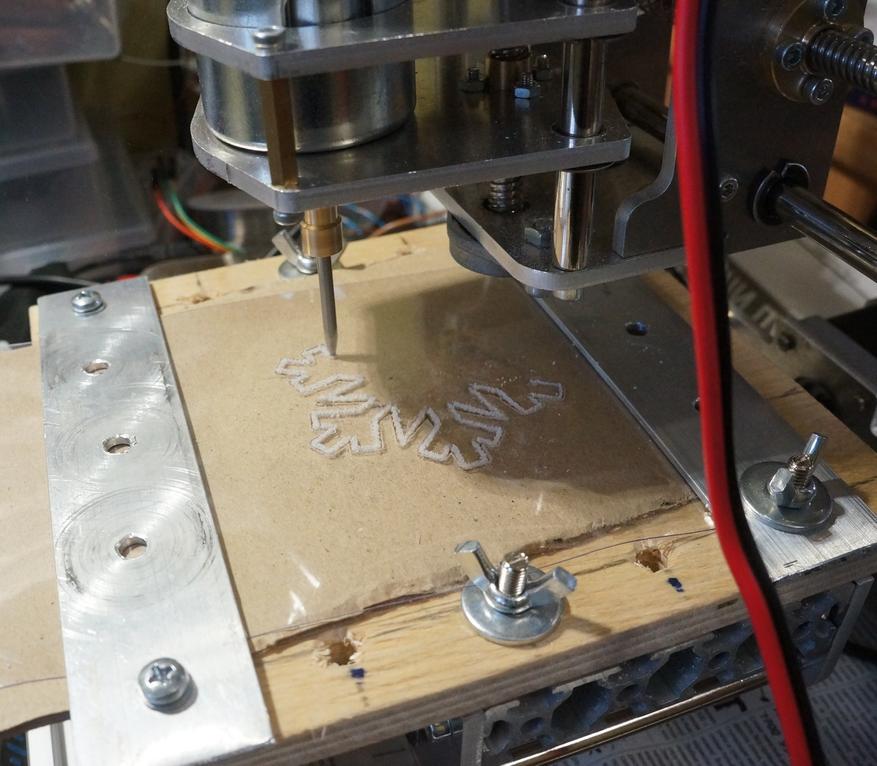
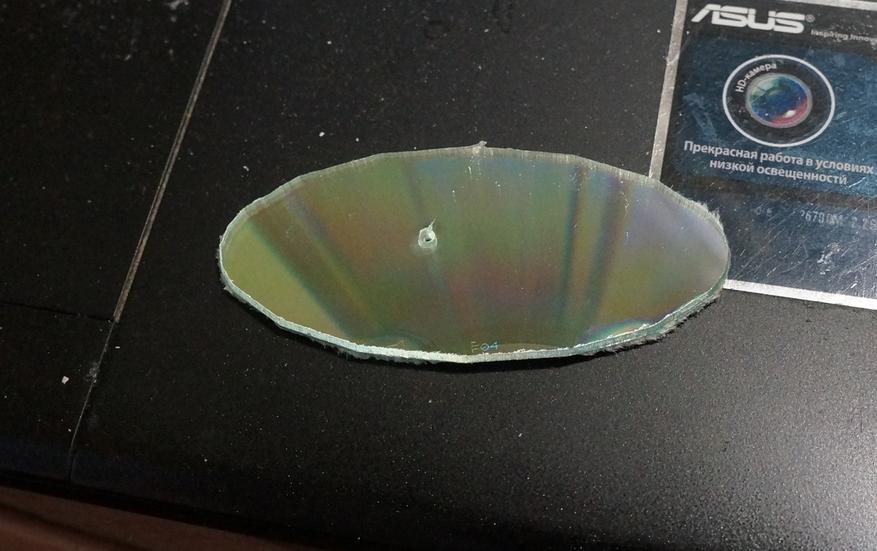
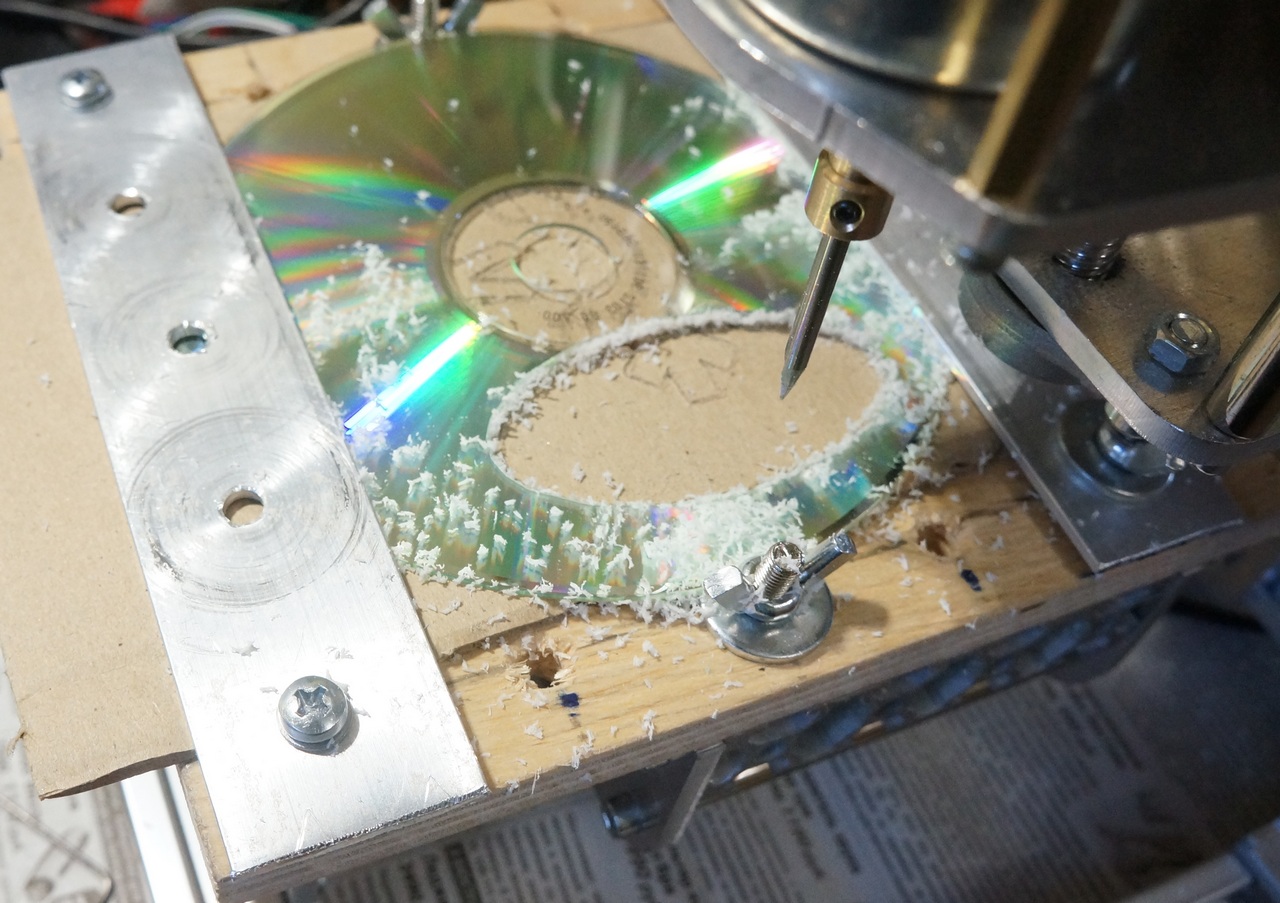
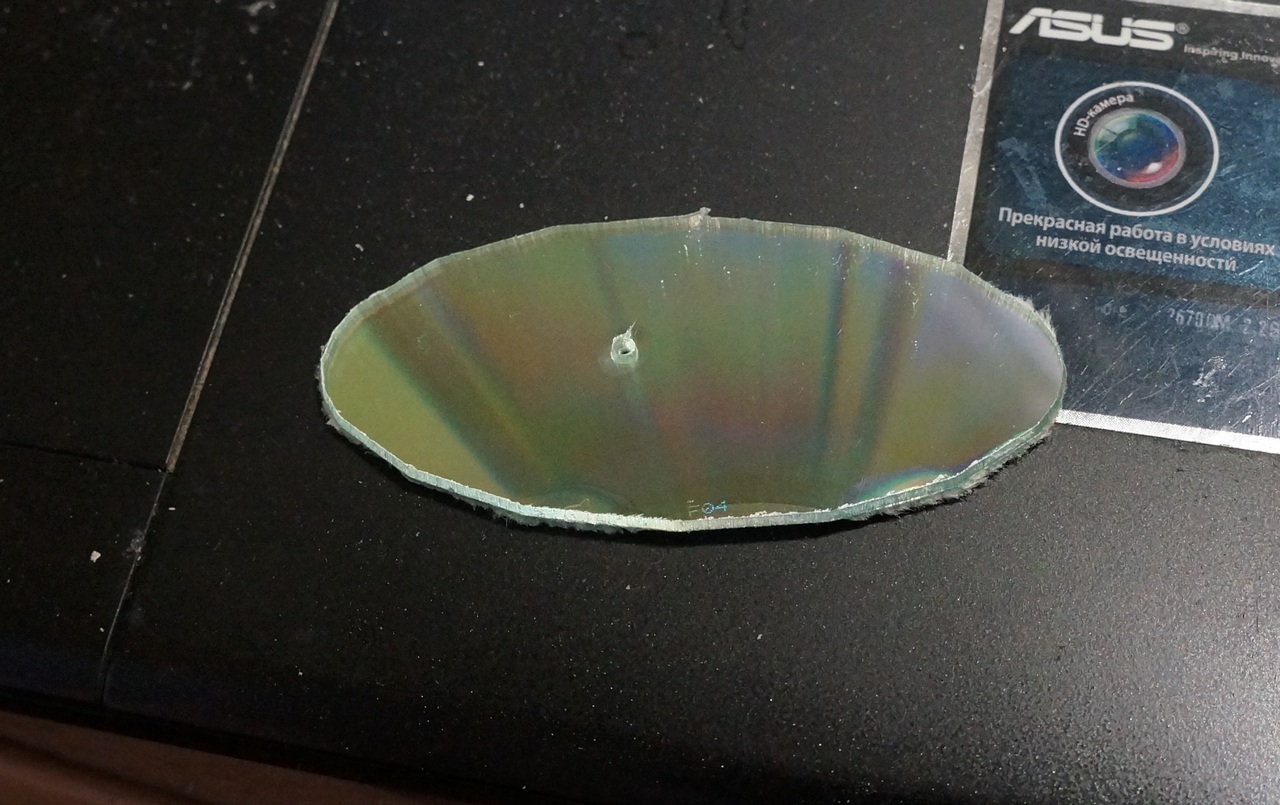
Устанавливаем вручную точку начала координат по трем осям и нажимаем кнопку «ZeroPosition», а после этого — «Begin» А вот овал получился слегка рубленным. Забыл перевести в Corel в кривые Возомнив себя ЧПУшником 80-го уровня решил вырезать детальку из 3мм акрила и сломал вторую фрезу — «рыбий хвост» купленный отдельно на АЛИ. Фреза быстро перегрелась, акрил начал плавится и застывать причудливым и очень твердым комом Интернет мне рассказал, что резка акрила производится с принудительным охлаждением фрезы, либо на очень маленькой скорости и за несколько проходов. И еще нужно учиться, учиться и еще раз учиться, осваивать и подбирать параметры процесса для каждого материала.
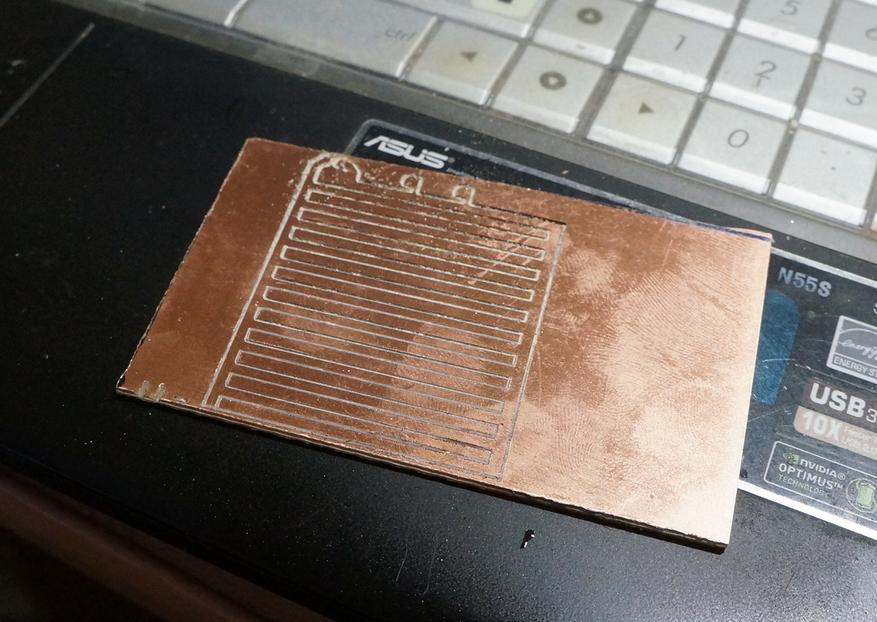
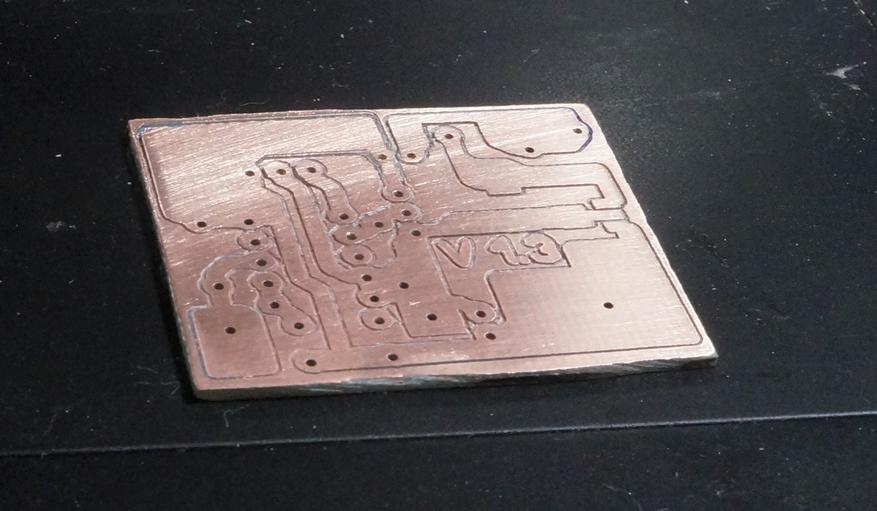
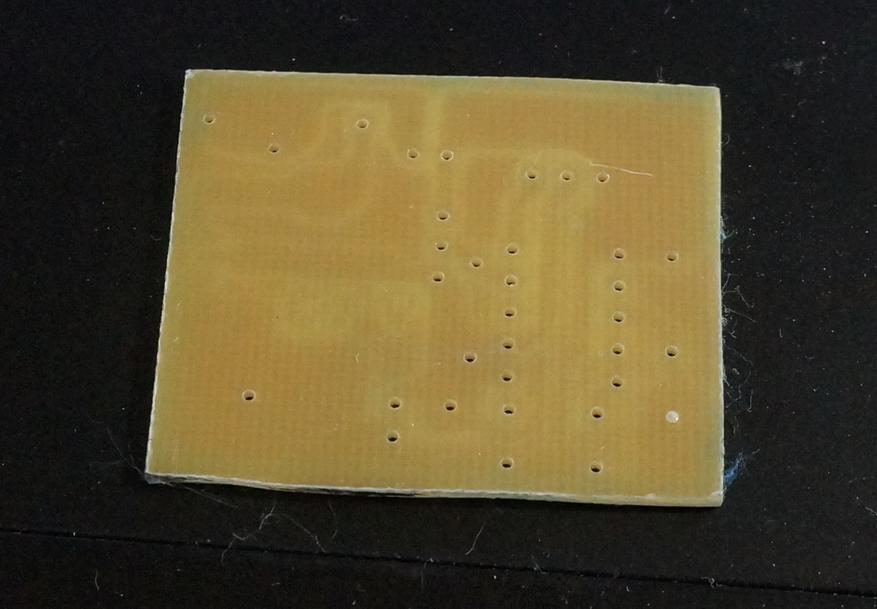
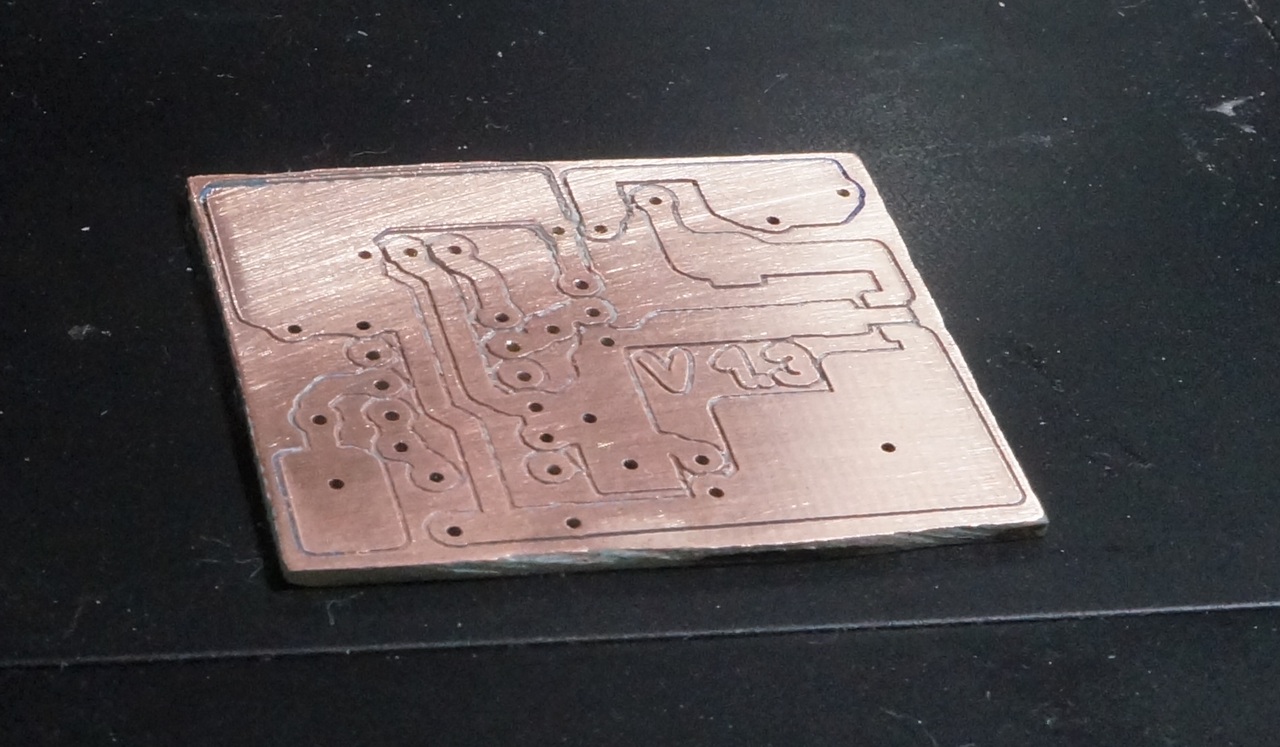
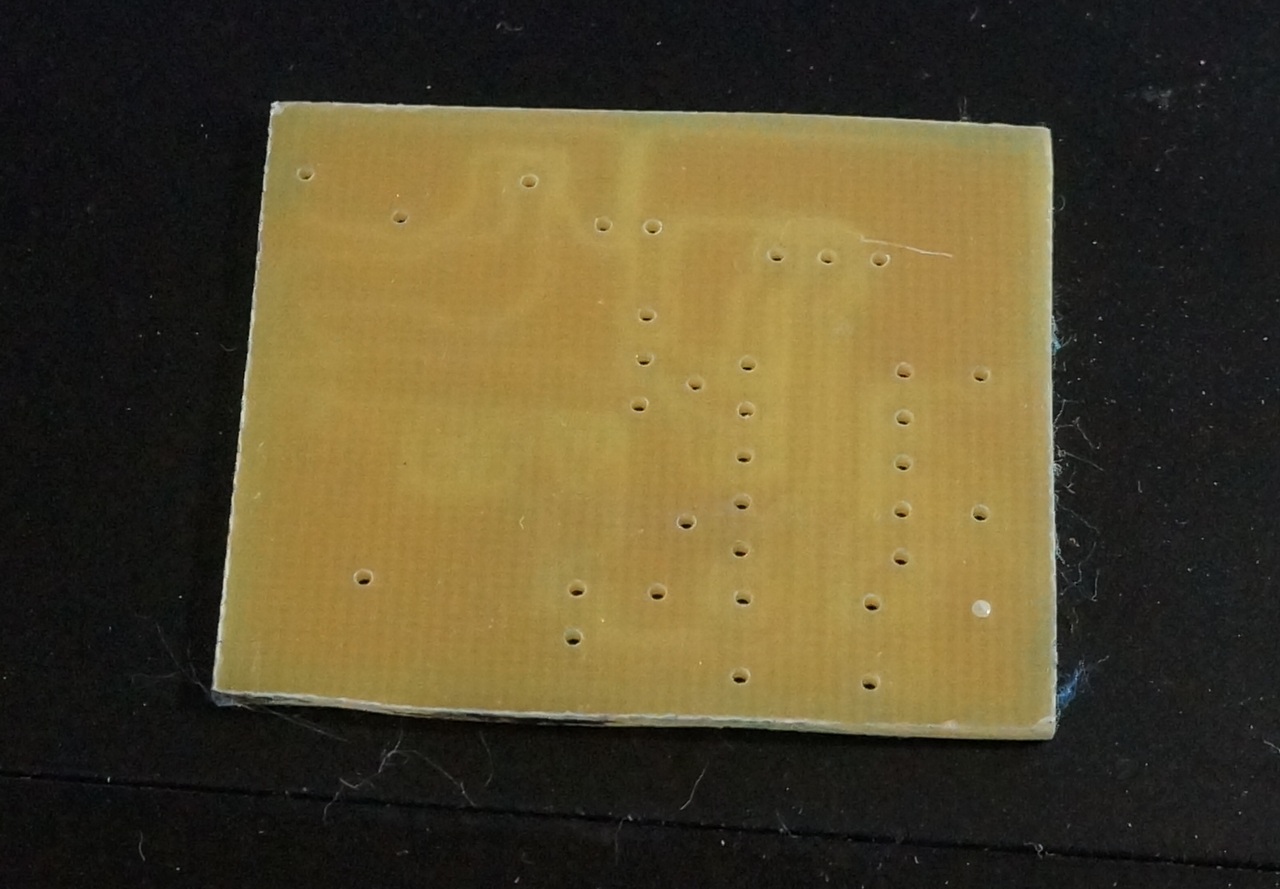
Изготовление печатных платС печатными платами оказалось все неплохо — процесс, обычная гравировка, текстолит — материал комфортный для резки
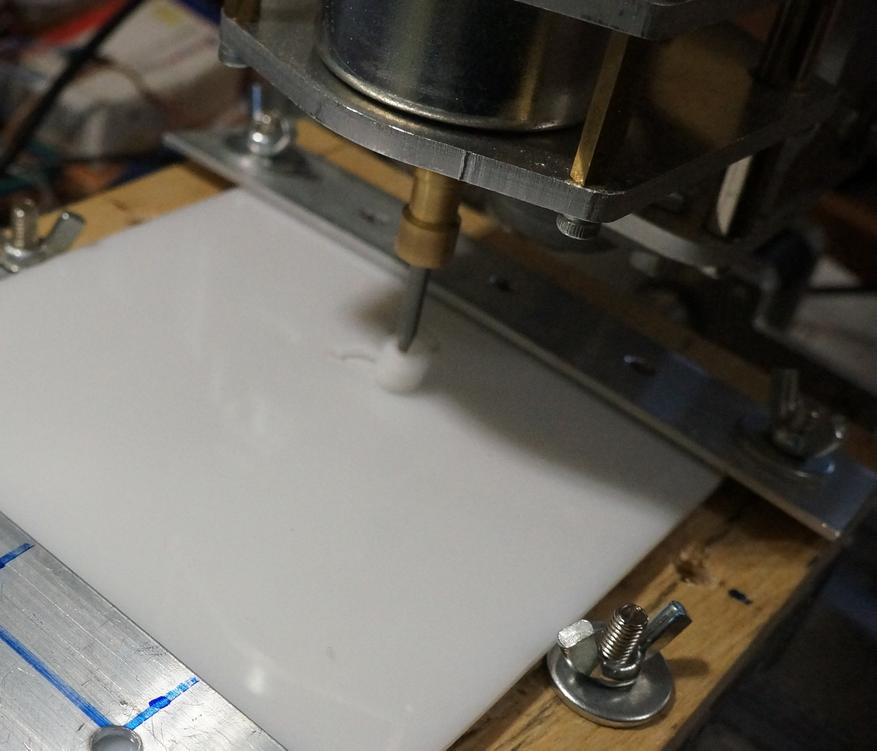
Для начала еще раз выставляю горизонталь всего чего можно
Сперва уровнем А затем резкой тонкой бумажки на рабочем столе.
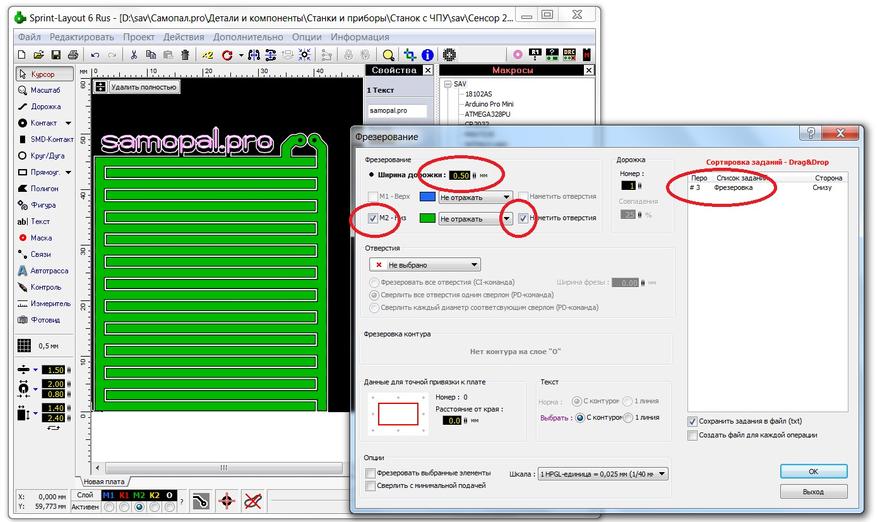
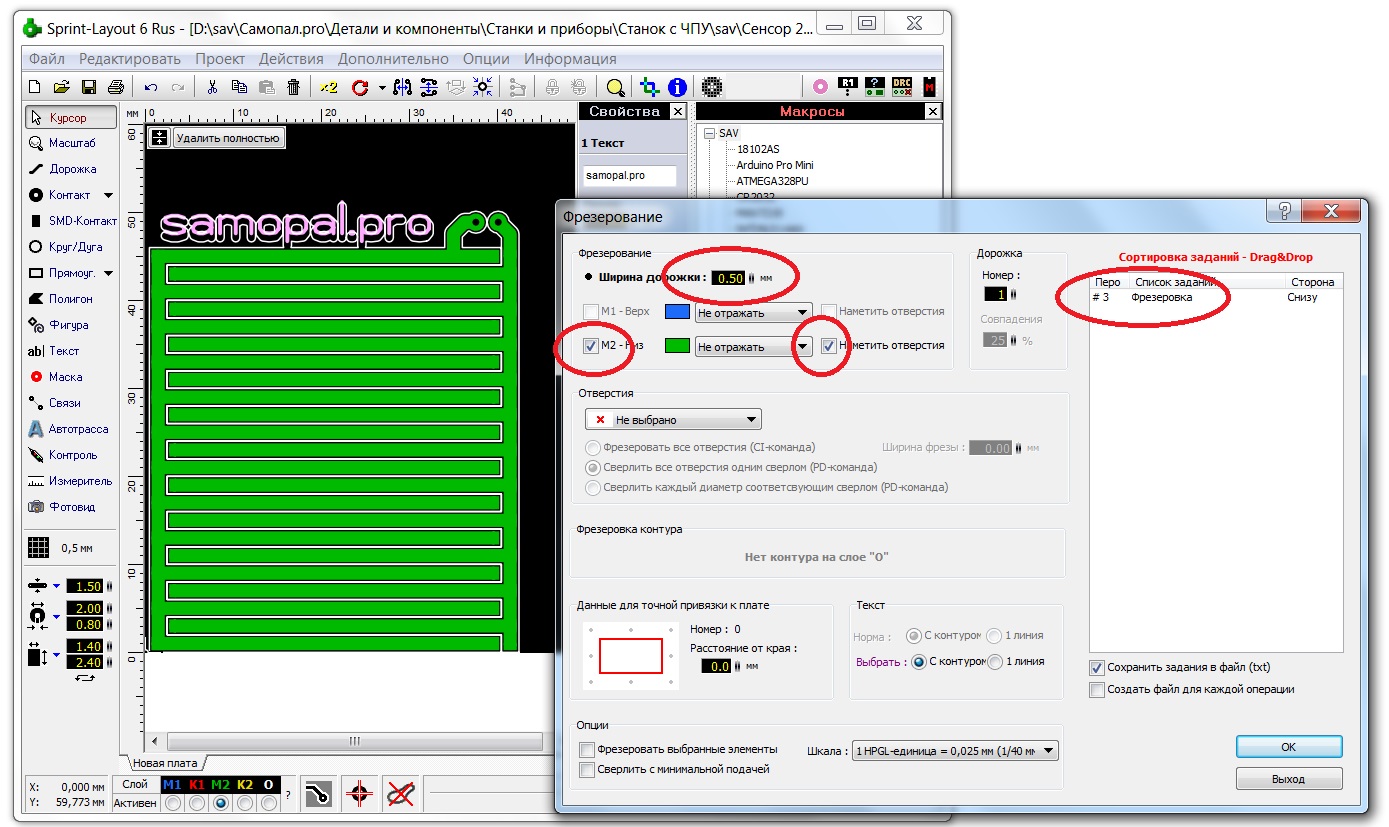
Подготовка платы — процесс не сложный. В SprintLayout делаю «Экспорт->данные фрезер HPGL .plt». Выбираю фрезеровку нужного слоя, устанавливаю требуемый отступ фрезы от дорожки
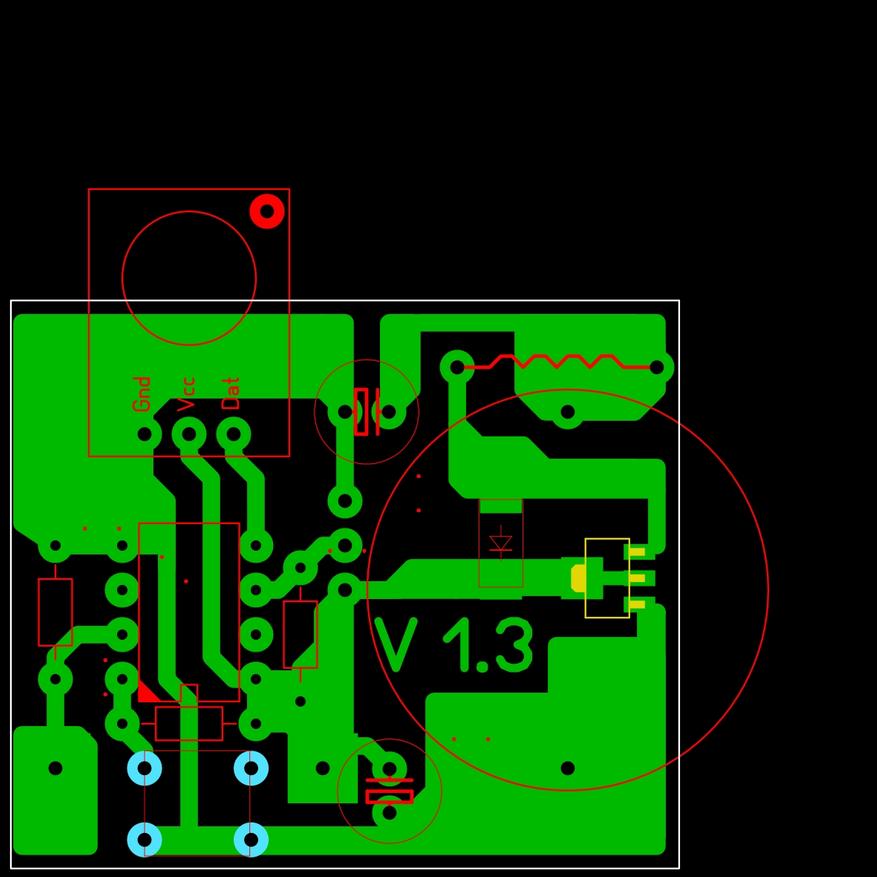
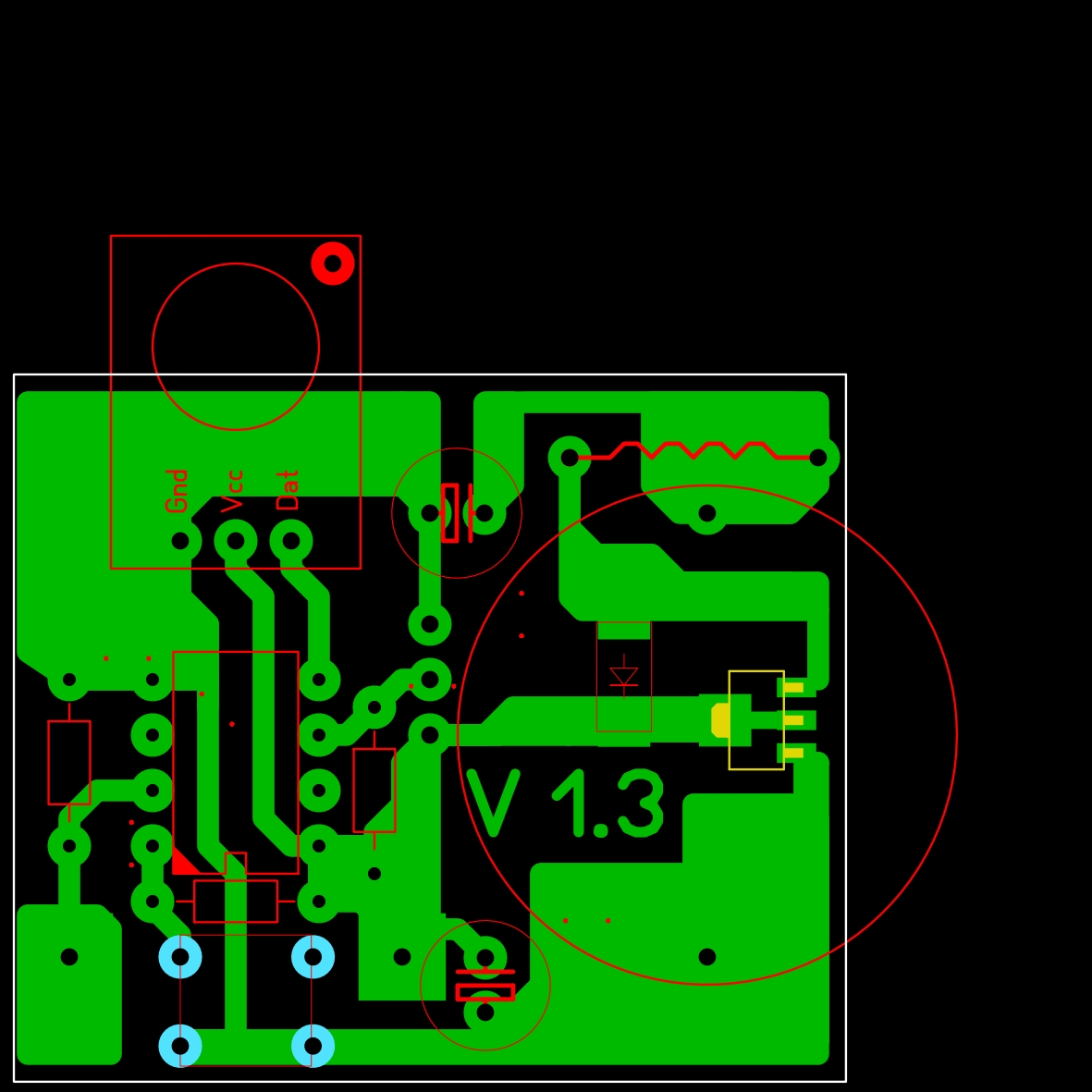
Получаю G-код все той де StepCam и получаю емкостной сенсор для системы мониторинга влажности почвы
Управляющая плата с готового проекта под ЛУТ Задаю так же второй файл под сверловку (можно сделать несколько файлов под разные сверла) Проблемы1. Станок очень капризен к USB-проводу. Короткие шнурки из комплекта мне показались неудобными, а вот из полутора метровых более менее заработал только один. При этом, если шпиндель подключен к реле, то очень часто возникает сбой программы. Может там общий минус нужно сделать или кондеров нга мотор шпинделя понавесить?
2. Заметил что при длительной работе микросхемы драйверов шаговых двигателей сильно греются. Увидел, что в интернете такие платки продаются с радиатором. Попытался вырезать радиатор из 2мм алюминия фрезой «рыбий хвост» 2мм. Не вышло. На скорости 40мм/мин китайская фреза приказала долго жить Выпилил кусочки алюминия, наклеил на микросхемки, но, видимо, что-то закоротил. В результате теперь у меня нет одного драйвера шагового двигателя ((( ВыводыОтличный стартовый набор для вхождения в мир ЧПУ.
Для коммерции слишком медленный, маленький и маломощный.
Вполне подходит для домашнего использования: изготовления печатных плат (фрезеровка, сверловка, обрезка по контуру), фрезеровке отверстий в DIY корпусах, изготовление некрупных деталей из пластика, текстолита, фанеры, гравировка на разных материалах. Наверное, не сложная 3D гравировка
Что понравилось
Все детали металлические.
Все собирается «из коробки» и работает.
Есть перспективы к некоторой модернизации
Что не понравилось
Сэкономлено на многих деталях, радиаторах драйвера, патроне шпинделя
Размеры маловаты. Хотелось бы иметь что-то хотя бы 200х150 на Х и Y
Мотор шпинделя слабоват для серьезных материалов
Тормозной контроллер
Что планирую сделать:
Увеличить габариты по оси Х до 300мм. Для этого заказал профиль 2020, шпильку привода и направляющие с держателями на 400мм. Из того что освободится увеличить высоту для изготовления отверстий в корпусах.
Сделать большой рабочий стол из дерева или толстого текстолита. На нем большинство заготовок отлично фиксируется при помощи двухстороннего скотча
Заменить патрон шпинделя на нормальный ER11 с разными цангами
Поставить ШИМ регулятор на мотор шпинделя
Попробовать приспособить в качестве шпинделя гравер
Купить разного инструмента
P.S. Очень много интересной информации есть на этом форуме: Форум клана ЧПУ-шников
P.P.S Пока писал обзор, цена на станок еще упала на $9 и на главной странице товара появилось видео на русском
Интересная статья, потом напишите как проапгрейдились.
По поводу обработки алюминия, тут вам необходимо учитывать физические свойства материалов, алюминий вязкий металл, и неопытному человеку в нем легко можно сломать и сверла мощной дрели и полотно ножовки по металлу. С акрилом вы сами похоже разобрались, но возможно при небольшой мощности движка поможет снижение скорости перемещения и уменьшение диаметра фрезы (толщина реза). Радиаторы вещь полезная, но не забывайте что многие клеи токопроводящие, и вы могли замкнуть дорожки клеем.
О Великой китайской стене знают все. Еще бы, её даже из космоса видно, а в книге рекордов Гиннесса она занимает гордую строчку лидерства. Но есть другие великие стены, о которых знает хорошо,...
С наступлением теплого времени года природа оживает после зимнего сна. Вместе с первыми зелеными листьями, цветами и прогулками на свежем воздухе просыпаются и клещи — маленькие, но...
Практически в каждом доме и офисном здании сегодня установлены пластиковые окна. Конечно, есть исключения: кто-то остается верен деревянным рамам, а где-то используются большие стеклянные витражи...
Лето у большинства людей ассоциируется с отпуском, поездками на море, отдыхом у водоемов, путешествиями в горы, рыбалкой и временем, проведенным на природе. Но многие ли задумываются о том,...
Чистая вода
— одно из самых стабильных веществ на
Земле. В отличие от молока, сока или
других продуктов, в ней нет сахаров,
белков и других компонентов, которые
служат пищей для бактерий...
Строительная рулетка — один из самых простых, востребованных и популярных измерительных инструментов. Её можно встретить практически в каждом доме, гараже, мастерской или на строительной...



































































1 комментарий
По поводу обработки алюминия, тут вам необходимо учитывать физические свойства материалов, алюминий вязкий металл, и неопытному человеку в нем легко можно сломать и сверла мощной дрели и полотно ножовки по металлу. С акрилом вы сами похоже разобрались, но возможно при небольшой мощности движка поможет снижение скорости перемещения и уменьшение диаметра фрезы (толщина реза). Радиаторы вещь полезная, но не забывайте что многие клеи токопроводящие, и вы могли замкнуть дорожки клеем.
Добавить комментарий