

Фотосъемка обычно ассоциируется с формированием двухмерного изображения. Исследователи, работающие в университете Стэнфорда, создали датчик изображения, который помимо этого, позволяет оценивать расстояния до объектов в кадре.
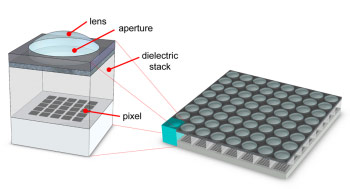
Разработка построена на использовании технологии, которую сами ученые называют «мультиапертурным датчиком изображения» (multi-aperture image sensor). В отличие от обычных датчиков, используемых в цифровых фотоаппаратах, новый датчик разбит на частично перекрывающиеся массивы размером 16х16 пикселей. Построение изображения в каждом массиве возложено на отдельную оптическую систему (отсюда и название датчика).

После того как снимок сделан, программа обработки изображения анализирует различия в положении одних и тех же элементов в разных массивах — например, рубашки на фоне обоев. Эти различия дают возможность вычислить расстояние до различных элементов снимка — в нашем случае, до рубашки и до стены, покрытой обоями.
В результирующем кадре, включающем «карту глубин», для каждого пикселя сохраняется не только красная, зеленая и синяя составляющая света, но и расстояние. Университетские ученые пока еще не разработали специального формата для полученных данных, но по их словам, информацию о расстоянии можно хранить в файле JPEG в виде метаданных.
Как утверждается, новая технология обеспечивает несколько дополнительных преимуществ — например, она позволяет снизить уровень шумов и переходных помех между пикселями разных цветов. Кроме того, некоторое усложнение конструкции датчика может привести к упрощению конструкции объективов, которые, как известно, вносят заметный вклад в стоимость камер.
Впрочем, за все приходится платить. Среди недостатков новых датчиков названы меньшая, чем у обычного датчика, разрешающая способность и значительный (примерно десятикратный) рост потребностей в процессорной мощности для обработки изображения, который, в свою очередь, отрицательно сказывается на времени работы от одного заряда батарей. Кроме того, далеко не все объекты подходят для построения трехмерной картины — для этого они должны иметь выраженную текстуру или другие детали.
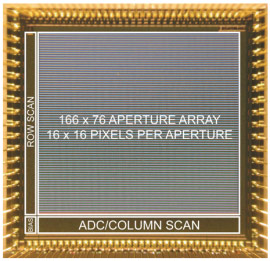
На нижнем фото изображен прототип датчика разрешением 3 Мп с 12616 массивами. Размер стороны пикселя — 0,7 мкм. Энергопотребление чипа равно 10,45 мВт.
Источник: Стэнфордский университет