Китайские инженеры научили робота играть в теннис с точностью попаданий 96,5%
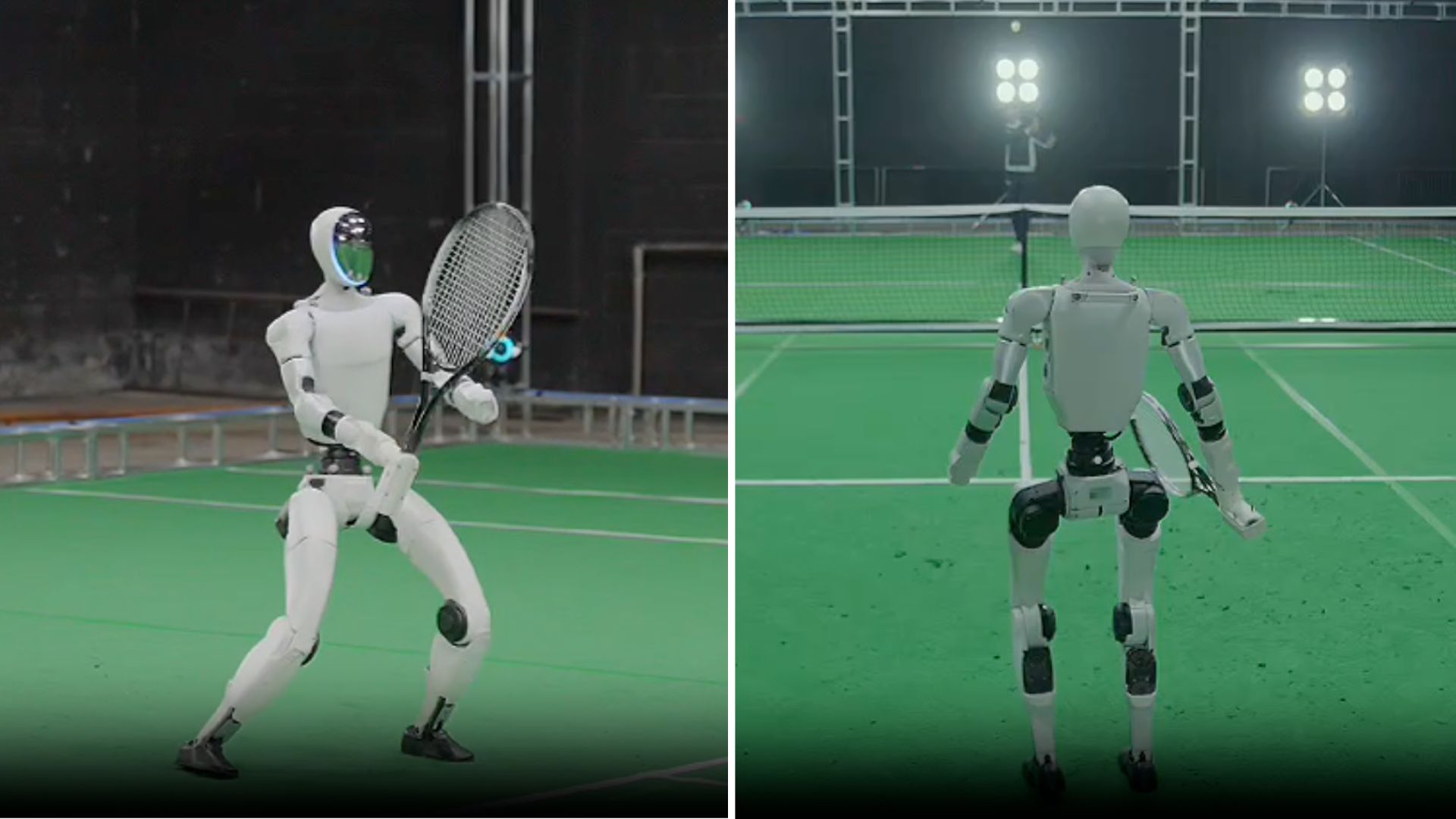
Команда разработчиков из Китая совместно с робототехнической компанией Galbot создала систему LATENT, позволившую человекоподобному роботу Unitree G1 освоить игру в теннис и успешно возвращать мячи в заданные зоны корта в 96,5% случаев из 10 000 испытаний.
Система LATENT основана на обучении робота с использованием несовершенных данных о движениях игроков-любителей. Разработчики собрали около пяти часов записей базовых теннисных движений — ударов справа и слева, боковых и скрестных шагов — с помощью компактного оборудования для захвата движения. Эти данные затем были разложены на элементарные двигательные компоненты и загружены в латентное пространство действий, где робот научился интерпретировать и комбинировать движения через обучение с подкреплением в масштабном симуляционном окружении.
Робот Unitree G1 прошёл тестирование в реальных условиях, участвуя в многоходовых розыгрышах против живых игроков как у сетки, так и на задней линии. По результатам испытаний система LATENT превзошла предыдущие методы роботизированного обучения по точности ударов, проценту успешных возвратов и естественности движений.
На текущем этапе робот не способен соперничать с профессиональными теннисистами. Система зависит от внешнего оборудования захвата движения и работает с упрощённым игровым сценарием — возвращением случайно подаваемых мячей в фиксированные точки. Для дальнейшего развития исследователи планируют внедрить активное компьютерное зрение и многоагентное обучение, при котором роботы будут тренироваться друг против друга в условиях, приближенных к соревновательному матчу. Авторы также указывают, что метод LATENT применим за пределами тенниса — в футболе и паркуре, где качественные данные о движениях человека труднодоступны.
Источник: Interesting Engineering











0 комментариев
Добавить комментарий