Новая технология навигации без GPS: как найти своего друга в подвале с помощью субатомных частиц
GPS — это удобный и самый популярный способ определения местоположения на Земле, который применяется в разных областях, от координирования авиации до онлайн-карт. Но этот способ имеет свои недостатки: сигналы GPS могут быть слабыми, нестабильными, их можно подменить, и вдобавок ко всему — не могут пройти через твердые или жидкие преграды. Поэтому ученые ищут альтернативные методы навигации, которые были бы эффективными в условиях, где GPS не работает.
Один из таких методов разработали японские ученые из Университета Токио. Они использовали свойства мюонов — элементарных частиц, которые постоянно бомбардируют Землю из космоса. Мюоны имеют очень высокую (почти как у света) скорость и способность проникать на большие глубины под землей, сохраняя при этом свое направление и энергию. Эти частицы не подвержены воздействию магнитного поля Земли или других факторов.
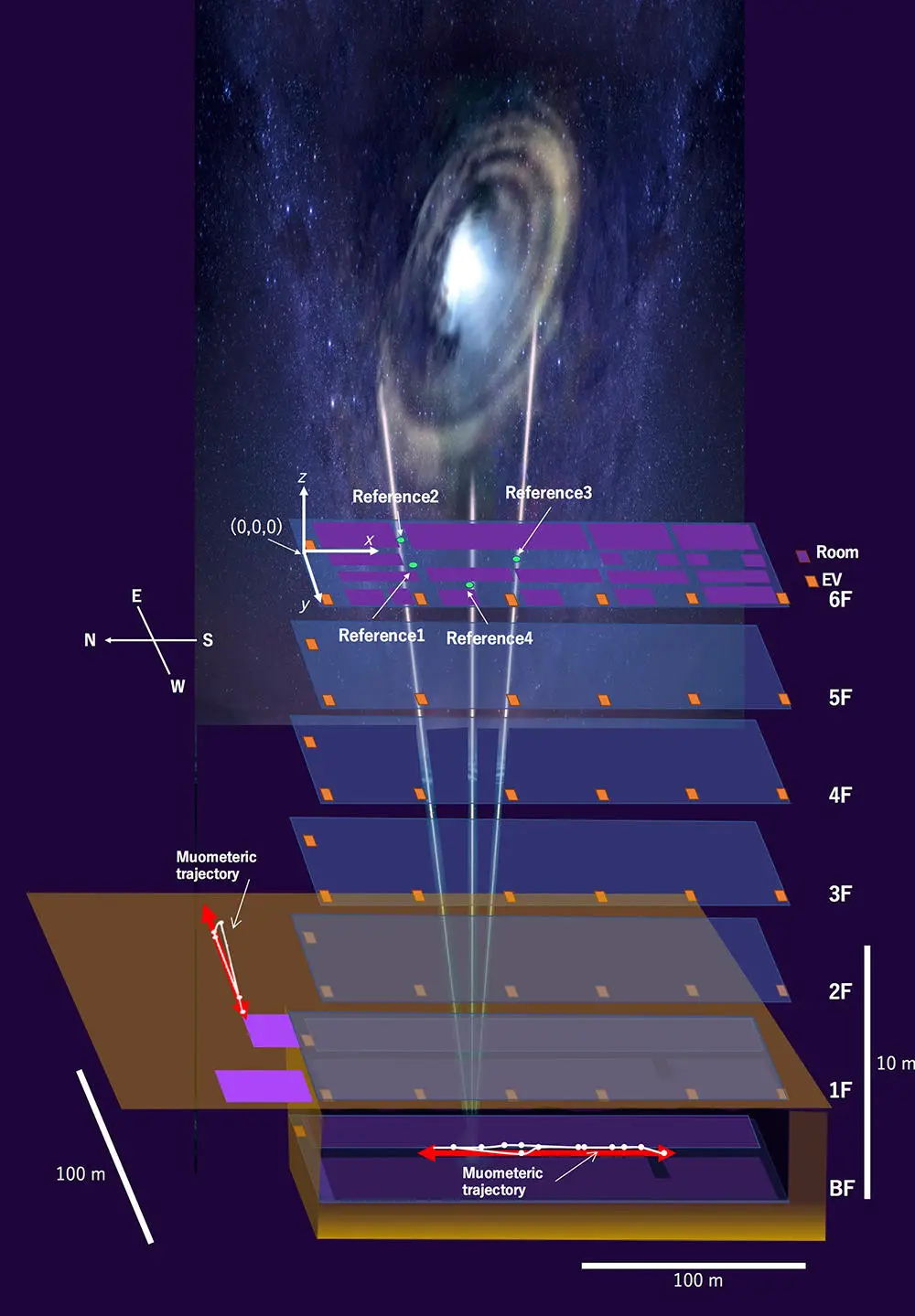
Японские ученые придумали мюометрическую систему позиционирования (muPS), которая может работать там, куда сигнал GPS физически не может проникнуть — под землей, в зданиях и даже под водой. Эта система состоит из пяти мюонных детекторов: четыре из них на поверхности и однин под землей, в качестве навигатора. Каждый детектор имеет две пластины из светочувствительного материала, между которыми находится слой газа. Когда мюоны взаимодействуют с газом, они излучают фотоны, которые фиксируются детектором. По числу фотонов ученые определяют энергию и угол падения частицы.
Для того, чтобы найти положение подземного детектора, ученые используют метод трилатерации. Этот метод позволяет определить координаты объекта по известным координатам двух или более точек-ориентиров и расстояниям от объекта до них. В случае с muPS точками-ориентирами являются поверхностные детекторы, а расстояниями — углы прихода мюонов к ним. По этим данным можно построить конусы, вершинами которых являются детекторы. Конусы направлены в сторону подземного детектора. Пересечение всех четырех конусов дает приблизительное положение подземного детектора. Чем больше мюонов проходит через все пять детекторов, тем точнее можно определить координаты подземного детектора.
Ученые провели эксперимент по проверке работы muPS в подвале шестиэтажного здания. Они установили четыре детектора на крыше здания и один в подвале. За 12 часов они смогли определить координаты подземного детектора с точностью до 7,4 метра. Это достаточно хороший результат, учитывая, что расстояние между детекторами было около 30 метров, а глубина под землей — около 10 метров.
Система muPS имеет большой потенциал для применения в будущем, например в поисково-спасательных операциях, мониторинге подводных вулканов и направлении автономных транспортных средств в подземных и водных условиях. Она также может быть полезна для изучения геологической структуры Земли и обнаружения скрытых объектов. Однако у системы есть и свои недостатки, такие как высокая стоимость детекторов, низкая скорость обработки данных и зависимость от погодных условий. Поэтому muPS пока не может полностью заменить GPS, но может быть эффективным дополнением к нему.
А как подземный датчик поддерживает связь с наземными?
При разработке этой технологии, учеными были выведены два способа, как подземный и наземные датчики мюонов могут поддерживать связь между собой:
— Первый способ — использовать проводную сеть, которая соединяет датчики между собой. Это позволяет передавать данные о регистрации мюонов в реальном времени и синхронизировать время измерений. Однако этот способ требует больших затрат на установку и обслуживание проводов, а также может быть подвержен помехам или повреждениям, не говоря уже о том, что это абсолютно непрактично.
— Второй способ — использовать беспроводную сеть, которая работает по принципу Wi-Fi. Это позволяет избежать проблем с проводами и сделать систему более гибкой и мобильной. Однако этот способ требует высокоточных часов для синхронизации времени измерений, а также может быть подвержен влиянию окружающей среды или затруднен в условиях, где радиоволны впринципе не могут проникать. В обоих случаях датчики обмениваются информацией о количестве, энергии и направлении мюонов, которые они регистрируют. Эта информация используется для определения положения подземного датчика по методу трилатерации.











8 комментариев
Добавить комментарий
Другое дело, что при наличии вводных, таких как проводная либо беспроводная связь между подземкой и поверхностью есть, на мой взгяд, более простые способы геопозиционирования, но разработка на то и разработка, что в начале она сырая и неточная, а в последствии доводится до субсантиметровых точностей. По крайней мере сами исследователи на это рассчитывают.
Добавить комментарий