Японские инженеры создали двуногого робота MEVITA из стандартных интернет-компонентов
Инженеры из Лаборатории робототехники JSK Токийского университета разработали двуногого робота MEVITA с открытым исходным кодом. Проект направлен на решение ключевых проблем существующих робототехнических платформ, делая продвинутую робототехнику более доступной.
MEVITA отличается минималистичной конструкцией, состоящей всего из 18 уникальных металлических компонентов, четыре из которых изготовлены методом сварки листового металла. Этот подход позволяет объединять сложные формы в единое целое, значительно сокращая количество необходимых деталей. Все компоненты можно приобрести в интернет-магазинах, что устраняет необходимость в специализированном оборудовании.

Система управления робота использует технологии искусственного интеллекта, разработанные с помощью обучения с подкреплением в симуляционной среде IsaacGym. Алгоритмы проходят дополнительную проверку в симуляции MuJoCo перед применением к физическому роботу через стандартные скрипты Python. Благодаря этому методу переноса из симуляции в реальность MEVITA успешно передвигается по различным поверхностям, включая неровный пол, траву, грунт, бетонную плитку и пологие склоны.
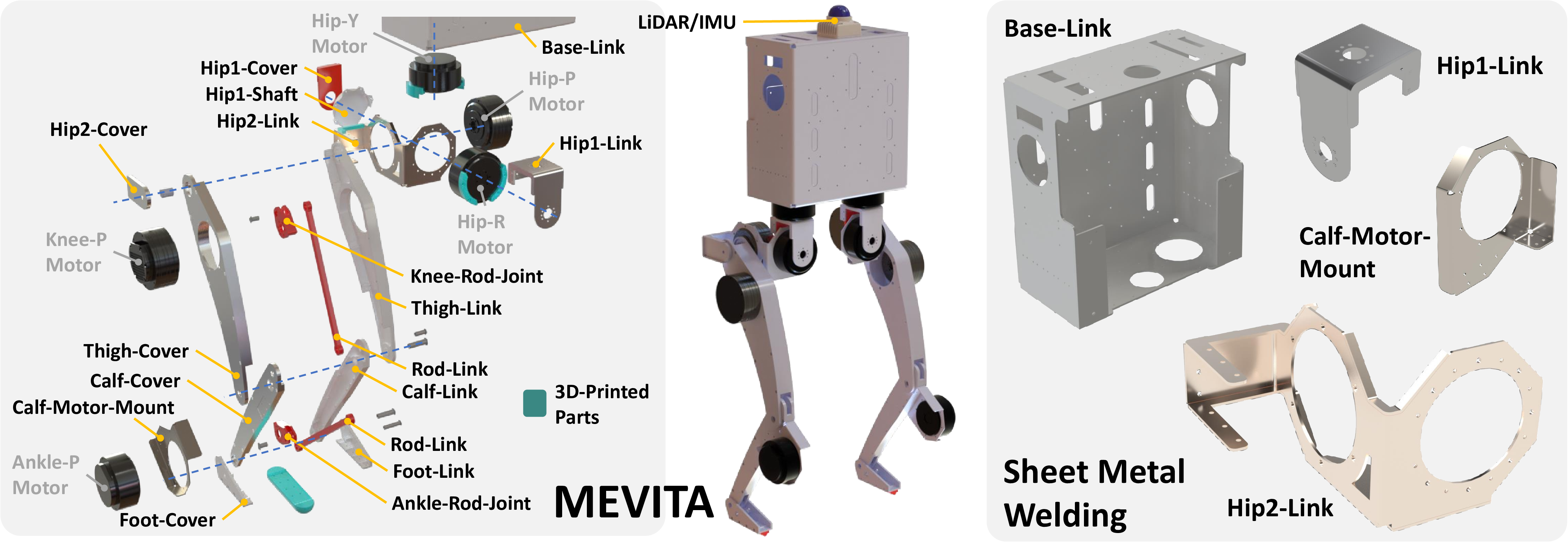
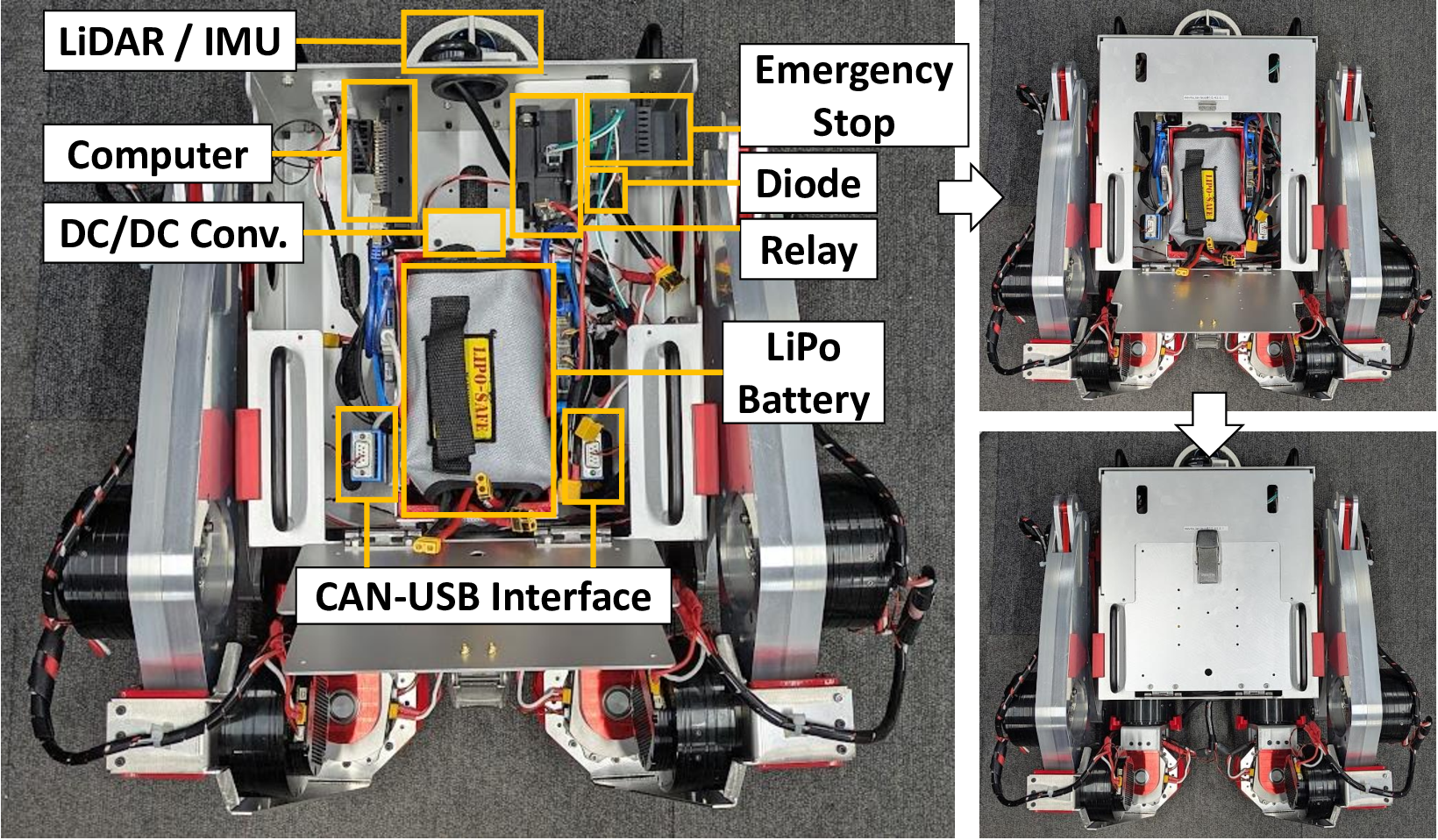
Робот оснащен серводвигателями, подключенными к компьютеру через два интерфейса CAN-USB. Для обеспечения безопасности система включает беспроводную кнопку аварийной остановки, силовое реле и диод. Навигация и поддержание равновесия обеспечиваются лидаром и инерциальным измерительным блоком (IMU).
Проект MEVITA полностью открыт — разработчики предоставляют доступ к аппаратному и программному обеспечению, а также к обучающим средам. Это позволяет исследователям, студентам и энтузиастам создавать собственных двуногих роботов без значительных финансовых вложений, что может ускорить инновации в данной области.
Источник: Interestingeng Iineering











0 комментариев
Добавить комментарий