Xynova представила робо-кисть Flex 2 с гибридной системой привода
Китайская компания Xynova выпустила роботизированную кисть Flex 2, использующую комбинированную систему управления движением. Устройство объединяет тросовый и прямой приводы для выполнения манипуляций с объектами различной формы и хрупкости.
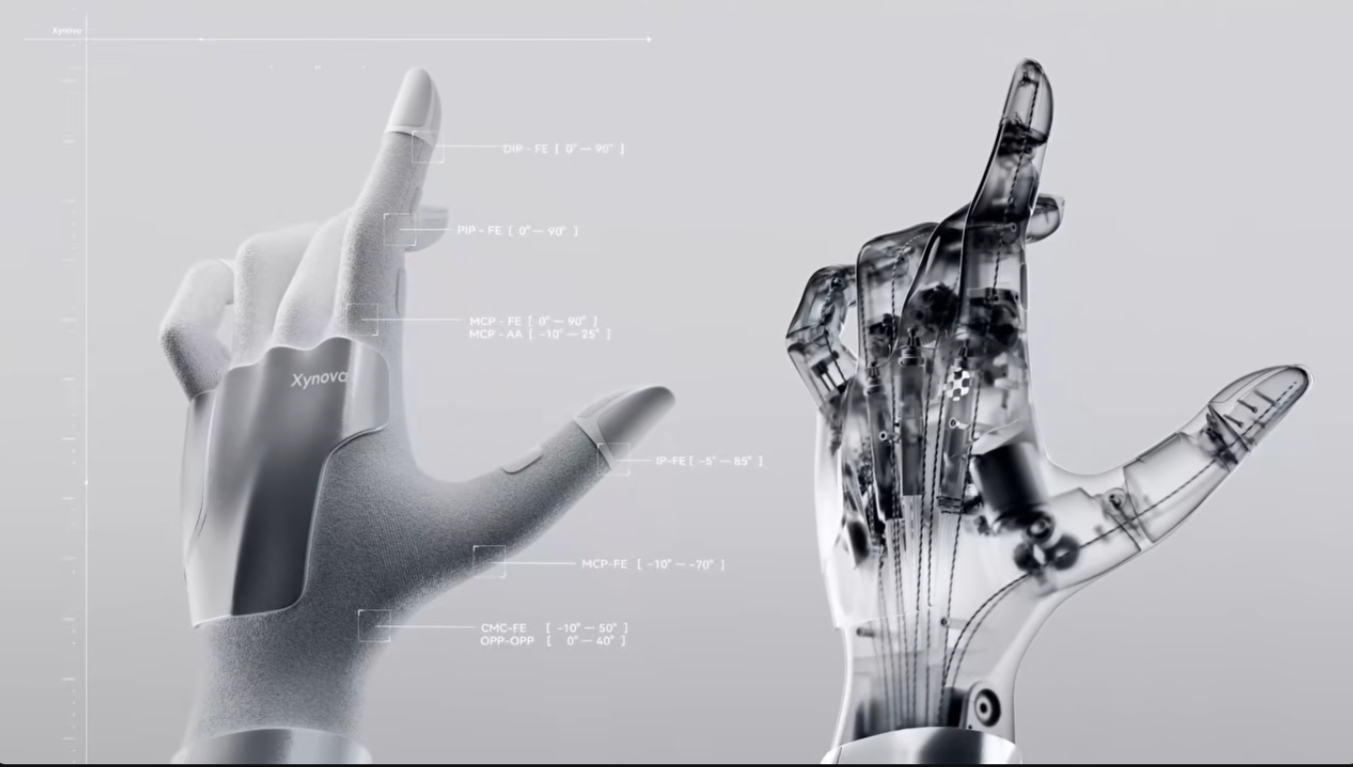
Конструкция включает 23 степени свободы при массе 400 граммов. Кисть выполняет циклы сжатия-разжатия с частотой два раза в секунду. Точность позиционирования составляет +-0,1 миллиметра, контроль усилия — 0,05 ньютона. Максимальная нагрузка при захвате достигает 12 килограммов, рабочая нагрузка — 4 килограмма.

Тросовая система обеспечивает гибкость движений, прямой привод отвечает за точность и крутящий момент. Устройство оснащено тактильными датчиками и проприоцепторами для адаптивного захвата и определения проскальзывания объектов.

Камера машинного зрения перемещена с ладони на запястье, что устраняет перекрытие обзора при захвате предметов. Разработчики получают доступ к открытой экосистеме для настройки функций устройства.

Предыдущая модель Flex 1 имела 25 степеней свободы при массе 380 граммов и максимальной нагрузке 30 килограммов. Новая версия сфокусирована на улучшении точности контактных манипуляций в неконтролируемых условиях.

Конструкция рассчитана на работу в условиях запыленности, устойчива к ударам и падениям. Ресурс составляет миллионы рабочих циклов.
Источник: Interestingeng Iineering











0 комментариев
Добавить комментарий