Роботы Берт и Спот успешно провели испытания на Этне для будущих миссий на Марс
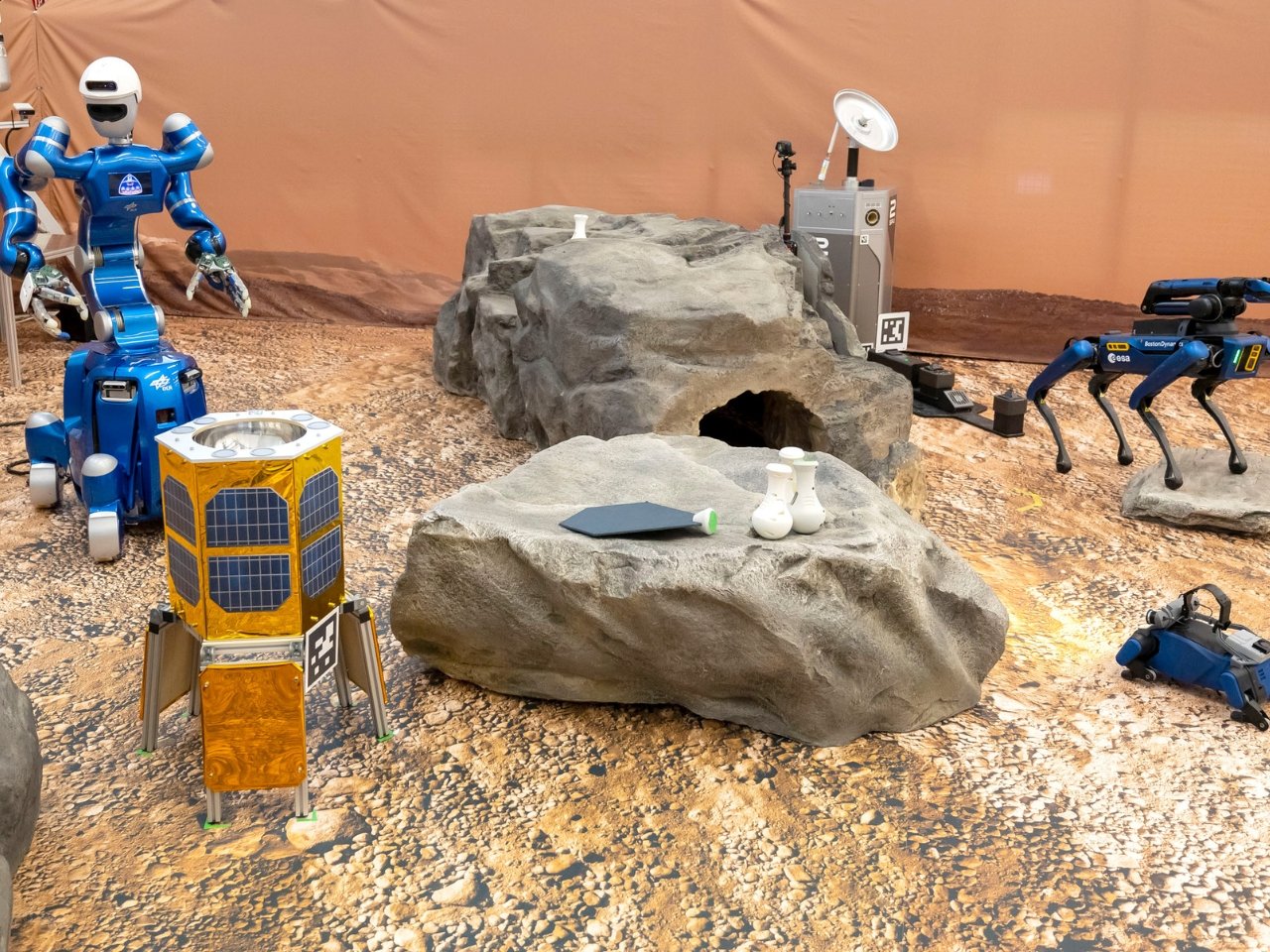
Немецкий аэрокосмический центр (DLR) завершил серию полевых испытаний роботизированного дуэта, предназначенного для будущих марсианских миссий. Колёсный марсоход Берт и четвероногий робот Спот продемонстрировали эффективное взаимодействие на вулканическом ландшафте горы Этна на Сицилии, который считается аналогом марсианской поверхности.
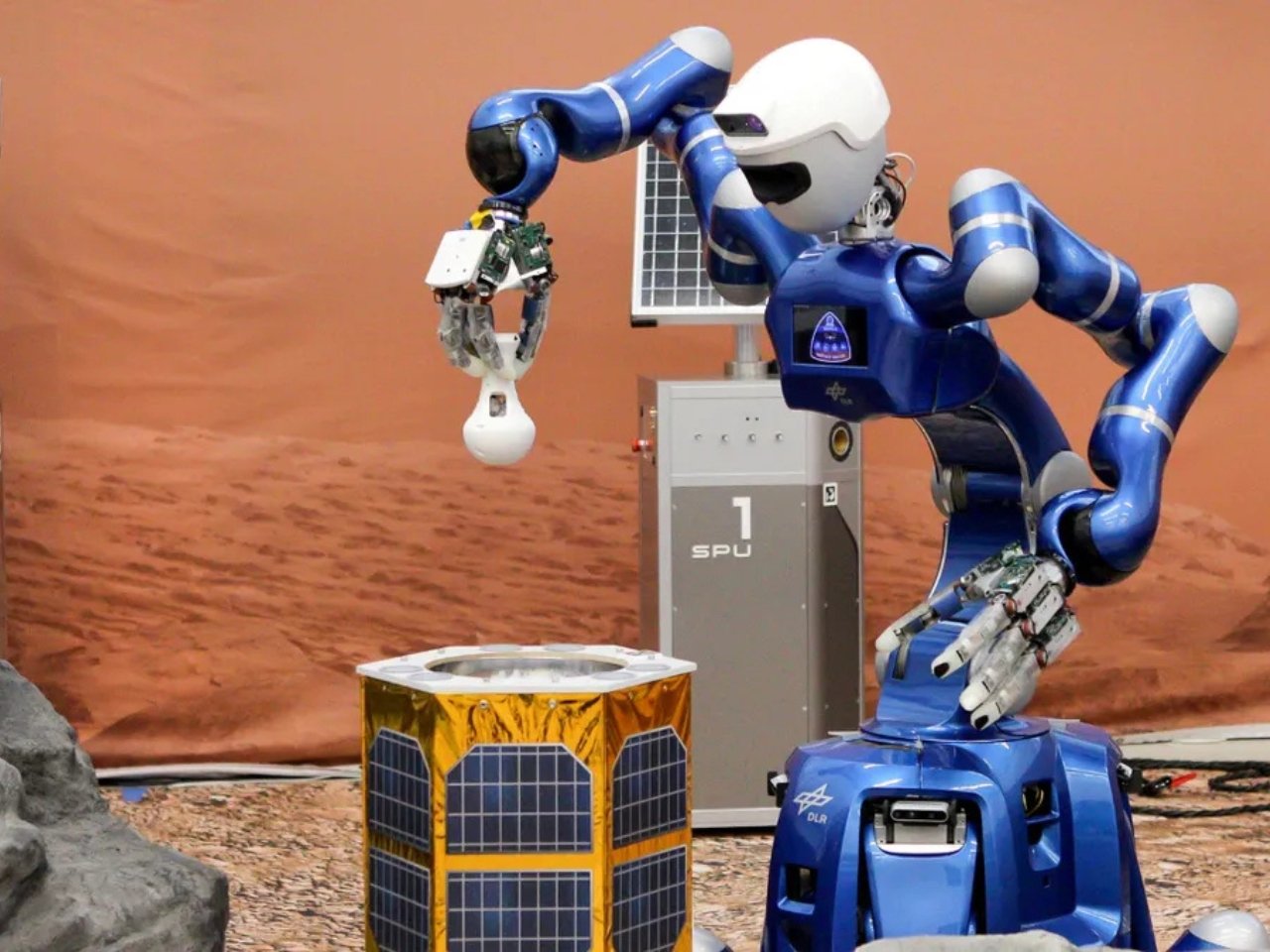
Спот, изначально разработанный Boston Dynamics и модифицированный инженерами DLR, использует четыре подвижные конечности для преодоления крутых склонов и перемещения по неровной местности, недоступной для колёсных аппаратов. Берт, оснащённый устойчивой колёсной платформой, способен транспортировать научное оборудование и собранные образцы на значительные расстояния.

Во время испытаний роботы автономно выполняли поиск потенциальных биомаркеров, идентификацию геологически значимых объектов и сбор образцов грунта. Оба робота оборудованы специализированными камерами, датчиками и программным обеспечением с элементами искусственного интеллекта, что позволяет им самостоятельно анализировать окружающую среду и принимать решения.

Ключевой особенностью эксперимента стало тестирование дистанционного управления роботами с имитацией орбитальной станции. Астронавт, находящийся на МКС, выполнял функции командира миссии, координируя действия роботов на поверхности. Такая схема моделирует будущие марсианские миссии, где астронавты на орбите могли бы руководить роботами-исследователями.
Технология призвана решить проблему задержки сигнала между Землёй и Марсом, которая может достигать 20 минут в одну сторону, что делает прямое управление с Земли неэффективным. Автономность роботов в сочетании с контролем со стороны орбитального экипажа позволяет оптимизировать исследовательский процесс.
Инженеры DLR подчёркивают, что данная разработка — важный шаг к созданию надёжных робототехнических систем для будущих марсианских экспедиций, где роботы-разведчики будут предшествовать высадке человека.
Источник: Yanko Design











0 комментариев
Добавить комментарий