Робот из KAIST освоил бег и «лунную походку» Джексона
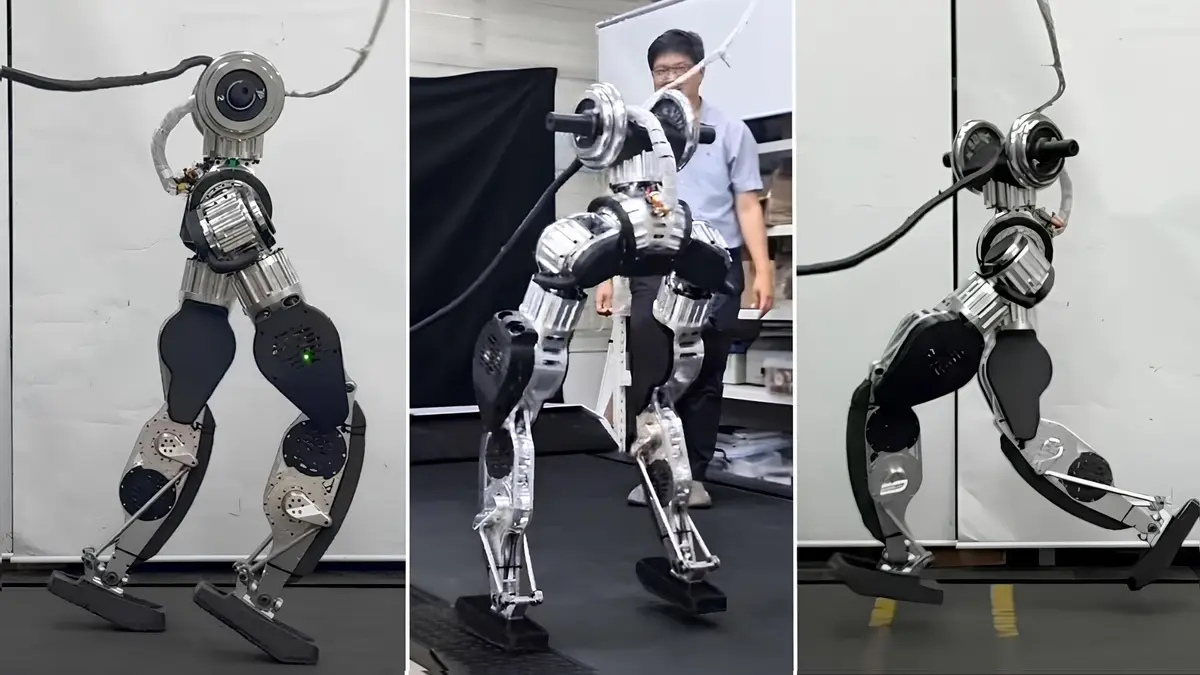
Исследователи из Корейского передового института науки и технологий (KAIST) разработали нового гуманоидного робота, способного выполнять сложные движения нижней частью тела. Двухминутное демонстрационное видео, опубликованное факультетом машиностроения KAIST и Исследовательским центром человекоподобных роботов (Hubo Lab), показывает впечатляющие возможности устройства.
Робот высотой 165 см и весом 75 кг демонстрирует различные типы передвижения, включая «лунную походку» в стиле Майкла Джексона, бег со скоростью до 3,3 метра в секунду (около 12 км/ч), а также «утиную походку» с сильно согнутыми коленями. Особенно примечательна способность гуманоида сохранять равновесие после внешних воздействий — на видео показано, как робот стабилизируется и возвращается на траекторию движения после толчка.
Важной особенностью разработки является навигация без использования камер или систем машинного зрения. Робот успешно преодолевает препятствия, поднимается и спускается по ступенькам, полагаясь только на внутренние датчики и алгоритм управления на основе искусственного интеллекта. Система управления была обучена с помощью алгоритма обучения с подкреплением в виртуальной среде.
Исследовательская группа KAIST подчеркивает, что все ключевые компоненты робота, включая двигатели, редукторы и драйверы, были разработаны собственными силами, обеспечивая технологическую независимость проекта. Гуманоид способен преодолевать бордюры, лестницы и перепады высот до 30 сантиметров.
Результаты исследования будут представлены на двух международных конференциях: Conference on Robot Learning (CoRL 2025) 29 сентября и IEEE-RAS International Conference on Humanoid Robots (Humanoids 2025) 1 октября. В дальнейшем ученые планируют расширить функциональность робота, добавив возможности одновременного перемещения и манипуляций, например, толкание тележек или подъем по лестницам с грузом.
Источник: Interestingeng Iineering











0 комментариев
Добавить комментарий