Новая технология: роботы держат предметы как люди
Международная группа исследователей из Университета Линкольна, Европейской Кембриджской исследовательской лаборатории Toshiba, Университета Суррея, Университета штата Аризона и KAIST создала инновационный контроллер для роботов, который позволяет им предотвращать выскальзывание предметов путём модуляции траектории движения, а не просто усиления захвата.
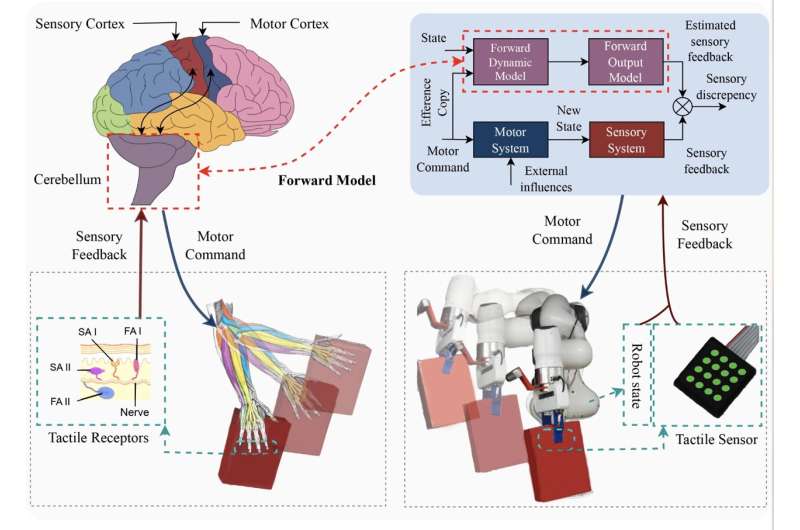
Новый подход основан на биологически вдохновлённой модели, имитирующей работу человеческого мозжечка. Контроллер создаёт внутреннюю «модель мира», прогнозирующую тактильные ощущения на основе запланированных движений. Это позволяет роботу предвидеть потенциальное скольжение и заранее корректировать свои действия — замедляться, менять направление или переориентировать манипулятор.

В отличие от традиционных методов, полагающихся исключительно на увеличение силы захвата, новый контроллер особенно эффективен при работе с хрупкими, влажными или скользкими предметами. Тестирование подтвердило, что в ряде случаев система значительно повышает стабильность захвата по сравнению с традиционными контроллерами.
Исследователи во главе с Амиром Галамзаном продолжают совершенствовать технологию, работая над ускорением контроллера для использования в более сложных условиях реального времени. Будущие разработки включают адаптацию системы для манипуляций с деформируемыми объектами и задач, требующих использования двух рук, а также интеграцию с алгоритмами компьютерного зрения для планирования траекторий на основе комбинации тактильной и визуальной информации.
Особое внимание учёные уделяют повышению прозрачности и объяснимости системы принятия решений, что критически важно для безопасного применения роботов в реальных условиях.
Источник: Tech Xplore











0 комментариев
Добавить комментарий