Мюнхенские инженеры испытали подводного робота для сбора мусора в порту Марселя
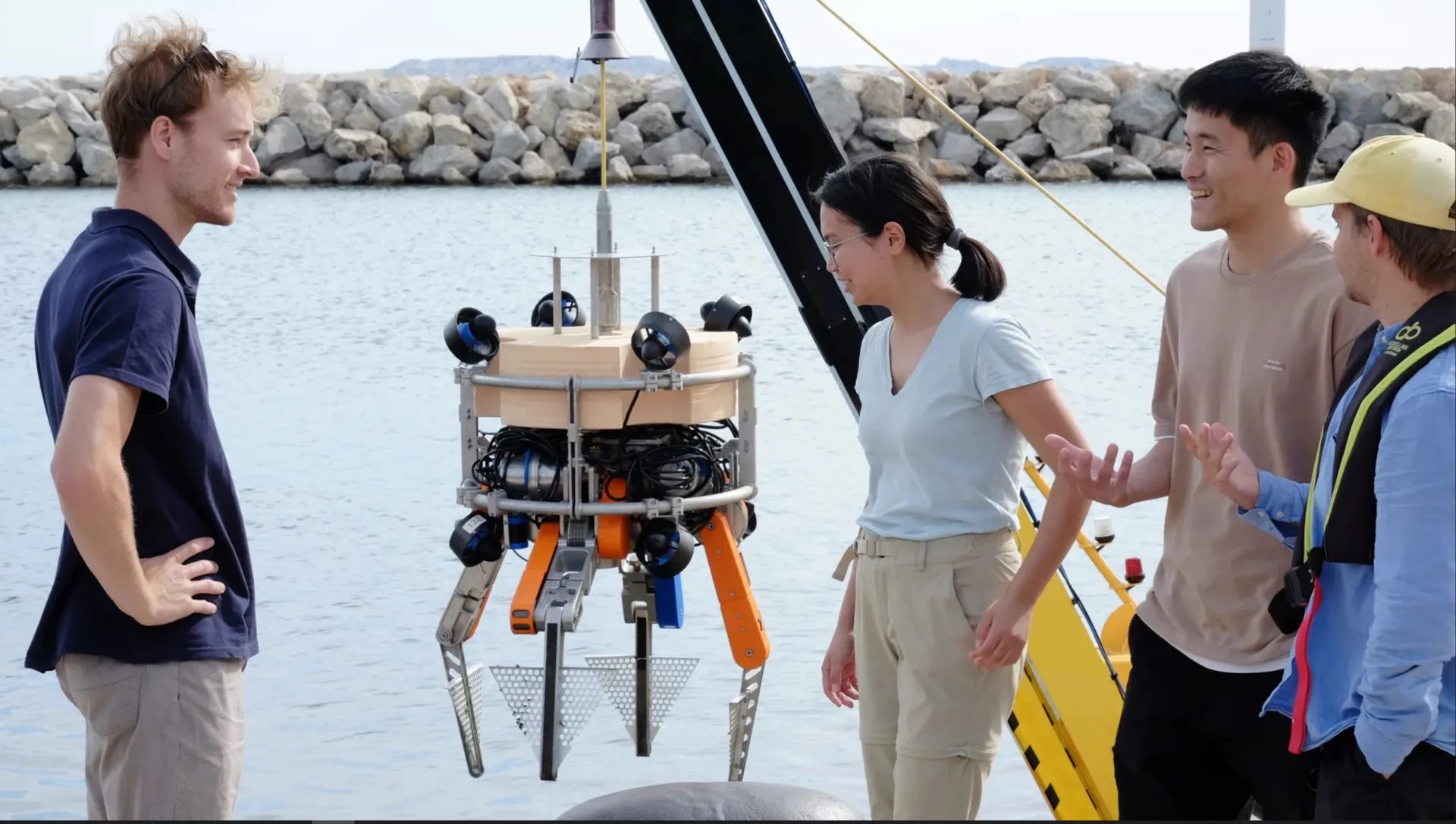
Исследовательская группа из Мюнхенского технического университета провела успешное испытание автономного подводного робота-манипулятора в рамках проекта SEACLEAR 2 в порту Марселя. Робот предназначен для сбора мусора, осевшего на морском дне.
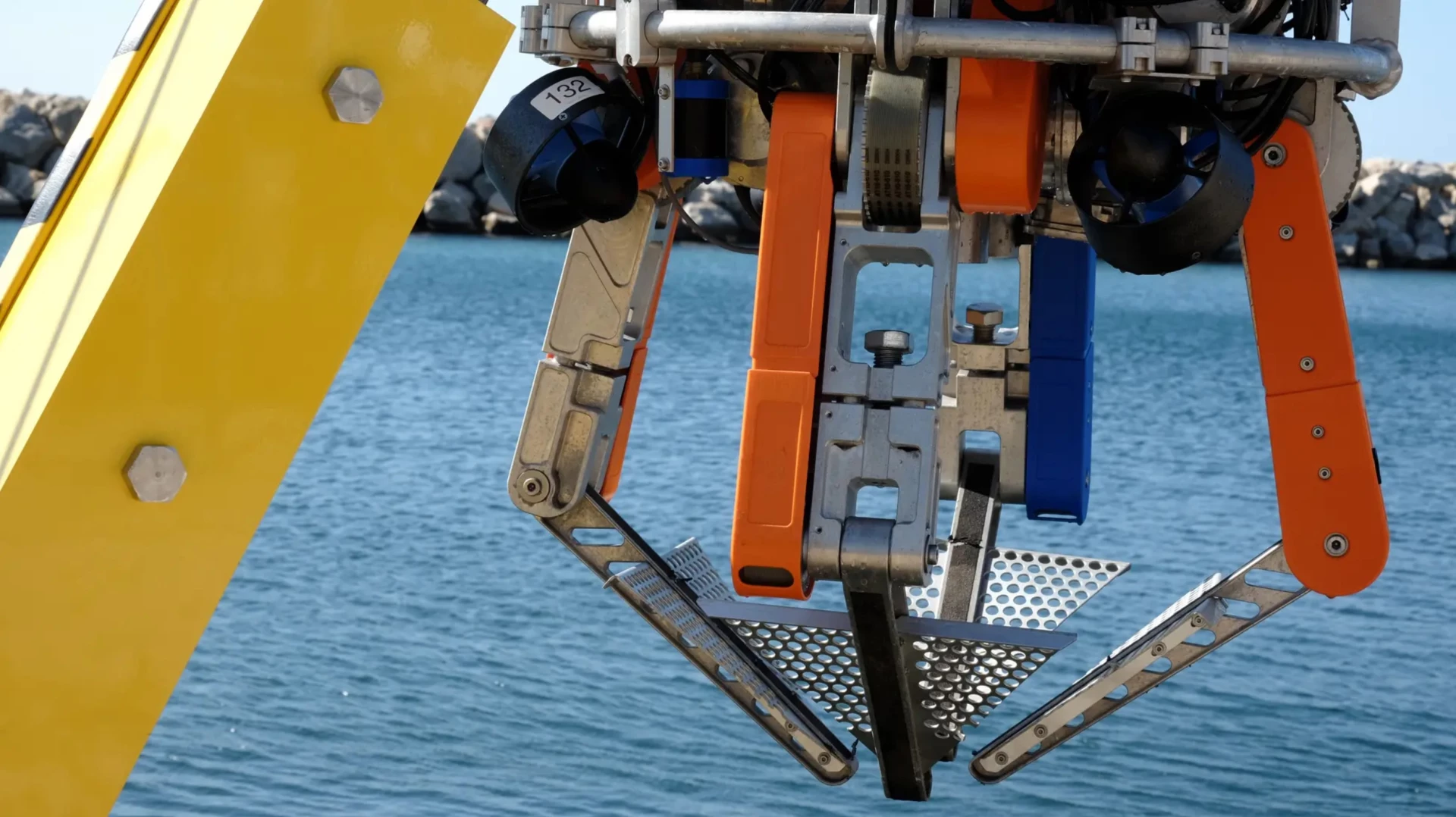
Устройство оснащено четырьмя клешнеобразными захватами, способными удерживать объекты с силой до 4000 ньютонов и поднимать предметы весом до 250 кг. Встроенные датчики позволяют роботу регулировать силу захвата, чтобы не повредить хрупкие предметы, такие как пластиковые ведра или стеклянные бутылки.
Для передвижения под водой робот использует восемь гребных винтов, установленных на раме. Питание и передача данных осуществляются через трос, который также служит для подъема крупного мусора на поверхность с помощью крана. Разработчики отказались от встроенного аккумулятора из-за ограничений по времени автономной работы.
Система обнаружения мусора включает бортовой сонар и камеру технического зрения. Искусственный интеллект, обученный на более чем 7000 изображений подводного мусора, помогает роботу идентифицировать объекты и определять оптимальный способ захвата.

Проект SEACLEAR финансируется Европейским союзом и объединяет несколько исследовательских организаций, включая Fraunhofer CML, Делфтский технический университет, Дубровницкий университет и Технический университет Клуж-Напоки. Конечная цель проекта — создание полностью автономной системы очистки морского дна, где беспилотное судно будет картографировать дно с помощью ультразвука, поисковый робот проведет детальное сканирование, а робот-манипулятор извлечет обнаруженный мусор.
Разработка SEACLEAR 2 продолжается, но успешное тестирование робота-манипулятора в реальных условиях представляет собой важный шаг к созданию автоматизированных систем для очистки морского дна от различных видов мусора — от рыболовных сетей до старых велосипедов и автомобильных покрышек.
Источник: New Atlas











0 комментариев
Добавить комментарий