Часть 4: процессоры семейства Intel Core 2
Мы продолжаем начатое нами исследование технологий управления производительностью и энергопотреблением современных процессоров, начало которому положили наши статьи, посвященные исследованию указанных технологий в процессорах Intel Pentium 4 и Intel Pentium M. Вполне естественно расширить это рассмотрение на случай новых процессоров Intel, основанных на микроархитектуре Intel Core. Примером такого процессора выступит новейший, только что анонсированный «экстремальный» процессор Intel Core 2 Extreme QX6700, характеризующийся четырехъядерной (2x2) конфигурацией процессорного ядра, получившего кодовое наименование Kentsfield.
Конфигурация тестового стенда
- Процессор: Intel Core 2 Extreme QX6700 (Kentsfield rev. B3, CPUID 6F7)
- Чипсет: Intel 975X
- Материнская плата: Intel D975XBX2 rev. 303, версия BIOS BX97520J.86A.1024.2006.0814.1142 от 08/14/2006
- Память: 2x1 ГБ Corsair XMS2-6400, DDR2-800, 5-5-5-15
Программное обеспечение
- RightMark CPU Clock Utility (RMClock) версии 2.2RC3 (pre-release)
- SpeedFan 4.31
- StressTest, SSE2 build
Intel Core 2: новые технологии и особенности их реализации
Прежде всего, остановимся на кратком рассмотрении новых технологий управления производительностью и энергопотреблением, реализованных в процессорах семейства Intel Core 2, а также особенностей их реализации, связанных с многоядерной конфигурацией данных процессоров.
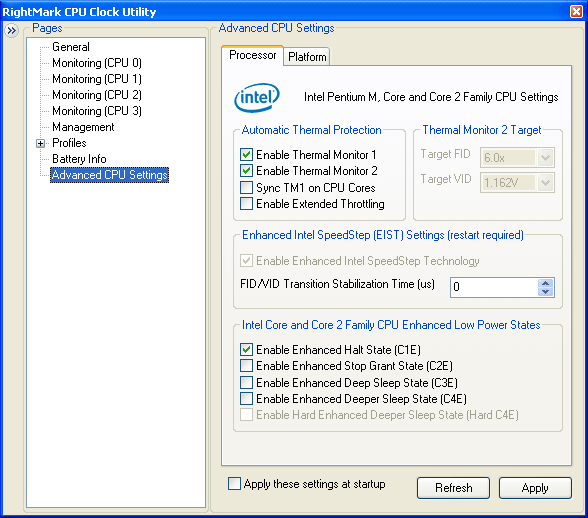
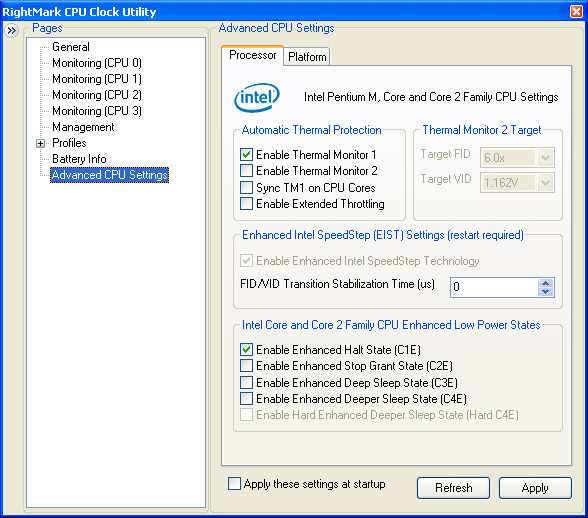
Для начала, взглянем на скриншот последней версии утилиты RightMark CPU Clock Utility 2.2RC3 (pre-release), в которой полностью реализована поддержка двух- и четырехъядерных процессоров семейства Intel Core 2.
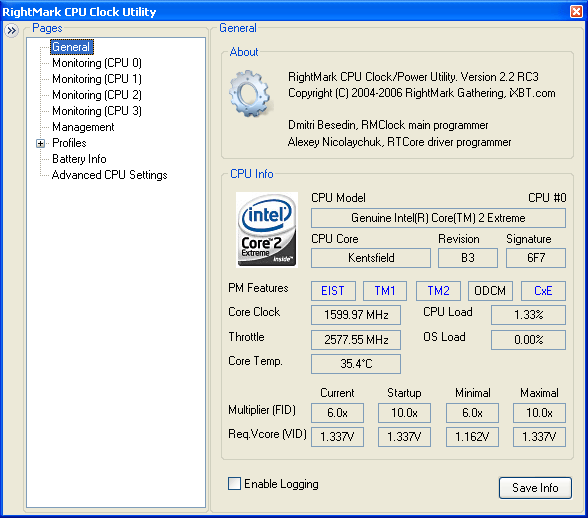
По основному скриншоту видно, что четырехъядерный процессор Intel Core 2 Extreme (Kentsfield) поддерживает все пять рассмотренных ранее технологий управления производительностью и энергопотреблением — технологию управления производительностью процессора по запросу Enhanced Intel SpeedStep (EIST), функции защиты процессора от перегрева Thermal Monitor 1 (TM1) и Thermal Monitor 2 (TM2), устаревшую технологию модуляции тактовой частоты процессора по запросу On-Demand Clock Modulation (ODCM), а также улучшенные режимы простоя Enhanced C States (CxE). По сравнению с процессорами Intel Pentium 4 и Pentium D 600-х, 800-х и 900-х серий, которые, как известно, характеризовались лишь наличием улучшенного режима простоя Enhanced Halt (C1) State, в процессорах Intel Core 2 (а также мобильных процессорах Intel Core Solo/Duo) последняя функция была расширена на случай всех возможных состояний бездействия процессора, включая режимы Stop Grant (C2), Deep Sleep (C3) и Deeper Sleep (C4).
Существенным отличием процессоров семейства Intel Core 2 от рассмотренных нами ранее процессоров Intel является наличие цифровых измерителей температуры ядра (Digital Thermal Sensor), встроенных в каждое ядро процессора. Эти датчики доступны также в мобильных процессорах Intel Core Solo/Core Duo. Их показания можно считывать и отображать независимо для каждого из ядер, что реализовано в последних версиях утилиты RMClock. С технической точки зрения, возвращаемым значением является отрицательное смещение температуры относительно максимально допустимой температуры функционирования ядра процессора (junction temperature, Tj). Последняя указывается в спецификации процессора и составляет 100°C как для процессоров Intel Core Solo/Core Duo, так и для процессоров семейства Intel Core 2. Однако, как показывает опыт, в последнем случае из показаний температуры необходимо вычитать дополнительное смещение, задаваемое в одном из дополнительных модель-специфичных регистров (MSR) процессора, относящихся к рассматриваемым функциям. Это смещение составляет, как правило, 16°C, и его учет реализован в готовящейся к выпуску версии 2.2 утилиты RMClock.
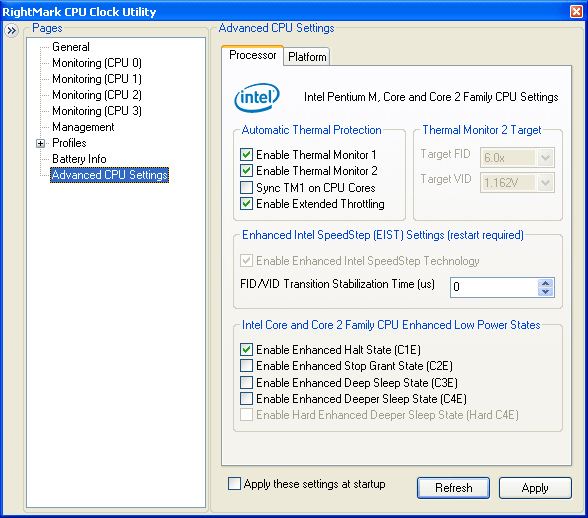
Возвращаясь к улучшенным режимам простоя процессора, из скриншота дополнительных настроек процессора видно, что для десктопных процессоров Intel Core 2 по умолчанию включен лишь режим Enhanced Halt (C1) State — C1E. Связано это с тем, что более глубокие режимы «сна» процессора, как правило, не используются в десктопных платформах — операционная система «не видит» их наличие в информации, предоставляемой ей ACPI BIOS материнской платы. Они приобретают актуальность для мобильных платформ — так, в частности, на платформе Intel Centrino Duo по умолчанию, как правило, оказываются включенными улучшенные режимы C2E и C4E.
Что касается технологий TM1 и TM2, по приведенному скриншоту можно легко увидеть основное отличие в их реализации по сравнению с предыдущими процессорами Intel — в процессорах Intel Core 2 можно задействовать обе технологии одновременно, что в рассматриваемом случае сделано по умолчанию. Однако, как будет показано ниже, само по себе это особого смысла не имеет — для реализации возможности одновременного использования TM1 и TM2 необходимо включение режима так называемого «расширенного троттлинга» (Extended Throttling). Суть последнего, как мы увидим ниже, заключается в аварийном включении технологии TM1 в том случае, если технология TM2 оказывается недостаточно эффективной для сохранения температуры процессора в допустимом интервале температур, заданных производителем. Несмотря на известную высокую эффективность технологии TM2, такая ситуация, в чем легко убедиться, вполне может возникнуть на четырехъядерных процессорах Intel Core 2 Quad / Intel Core 2 Extreme, поэтому мы можем сказать, что режим расширенного троттлинга для этих процессоров предусмотрен производителем явно не зря.
Последняя из дополнительных настроек, являющаяся отключенной по умолчанию, — режим синхронизации TM1 на ядрах процессора (Sync TM1 on CPU cores) — заключается в использовании одного и того же режима модуляции тактовой частоты процессора одновременно для всех его ядер. По всей видимости, особого смысла в использовании этого режима действительно не имеется — ведь каждому из ядер процессора (даже включая те, которые являются составной частью «общего ядра») позволительно иметь собственный режим модуляции тактовой частоты, в зависимости от условий его загрузки и рабочей температуры. С одной стороны, принудительная синхронизация режима TM1 может способствовать более эффективному снижению температуры процессорного ядра в целом, но с другой стороны, она может приводить к более выраженному снижению производительности процессора в случае его перегрева. Видимо, производитель счел более важным сохранение как можно более высокой производительности процессора даже при его сильном перегреве, в связи с чем этот режим не используется по умолчанию.
Говоря о независимости или, наоборот, зависимости отдельных ядер друг от друга, мы перешли к рассмотрению особенностей реализации функций управления производительностью и энергопотреблением процессоров семейства Intel Core 2, поскольку указанные особенности связаны именно с этим обстоятельством. Как известно, классические двухъядерные процессоры Intel Core 2, а также Intel Core Duo, характеризуются наличием общего для обоих ядер процессора L2-кэша. Поскольку этот ресурс функционирует на полной частоте ядра процессора, становится совершенно очевидно, что оба ядра двухъядерных процессоров Intel Core 2 (и Intel Core Duo) всегда обязаны функционировать на одной и той же тактовой частоте. Несмотря на то, что каждое из ядер имеет свой собственный набор модель-специфичных регистров (MSR-ов), предоставляющих возможность управления производительностью и энергопотреблением ядра процессора, попытка установки разных значений тактовой частоты (точнее, множителя системной шины, FID) для разных ядер процессора приводит к немедленному зависанию системы.
Поскольку прямое отношение к тактовой частоте ядра процессора имеют лишь технологии EIST и TM2, одинаковыми для обоих ядер должны быть значения именно этих параметров. А если учесть, что программирование режима TM2 для процессоров Intel Core 2 оказывается недоступным (соответствующий MSR у этих процессоров является «read-only»), проблема синхронизации тактовой частоты ядер сводится к ее управлению посредством технологии EIST. Естественно, драйвер процессора или утилиты управления вроде RMClock должны быть «в курсе» этой особенности управления производительностью двухъядерных процессоров Intel посредством технологии EIST. В то же время, как мы уже упоминали выше, каждому из ядер позволительно иметь собственный уровень «троттлинга» (модуляции тактовой частоты — по запросу, посредством ODCM, либо автоматически, посредством TM1), поскольку «троттлинг» затрагивает лишь исполнительные ресурсы ядра процессора, но не влияет на функционирование его L2-кэша.
На первый взгляд, несколько более сложной может оказаться ситуация управления производительностью и энергопотреблением четырехъядерных процессоров, примером которого является рассматриваемый нами Intel Core 2 Extreme QX6700. Однако таковой она кажется лишь на первый взгляд — дело в том, что ядро этого процессора, по сути, представляет собой как бы два независимых процессора Intel Core 2 Duo E6700, помещенных вместе в один корпус. Соответственно, управление каждым из этих независимых «двухъядерных ядер» оказывается также независимым.
Рассматриваемый процессор представляется операционной системе в виде четырех «системных» процессоров, под которыми, как мы знаем, может подразумеваться все, что угодно — либо полноценное процессорное ядро (например, Intel Pentium M), либо его составная часть (Intel Core Duo или Intel Core 2), либо и вовсе логический процессор (Intel Pentium 4 с технологией Hyper-Threading). Соответственно, для управления каждым из «системных» процессоров необходимо как-либо отнести его к конкретному физическому устройству, а далее — сгруппировать «системные» процессоры по критерию их принадлежности к данному физическому процессору/ядру, которым можно управлять как целым устройством. Для решения этой задачи отлично подходит так называемый APIC ID процессора, который, вообще говоря, может произвольно назначаться ему операционной системой. В случае четырехъядерных процессоров Intel Core 2 младший бит APIC ID означает индекс «зависимого» («дочернего») ядра процессора внутри составляющего его «независимого» («главного») ядра (0 либо 1), а следующий за ним бит APIC ID, смещенный вправо на единицу, отражает индекс «независимого ядра» внутри корпуса процессора. Более наглядно это представлено ниже в таблице.
| Индекс системного процессора | APIC ID | Индекс «главного» ядра, APIC ID[1] >> 1 | Индекс «дочернего» ядра, APIC ID[0] |
|---|---|---|---|
| 0 | 0 | 0 | 0 |
| 1 | 2 | 1 | 0 |
| 2 | 1 | 0 | 1 |
| 3 | 3 | 1 | 1 |
Из этой таблицы видно, что APIC ID процессора не обязательно совпадает с номером связанного с ним «системного» процессора, поэтому полагаться на этот номер было бы ошибочно. Заметим также, что представленная выше расстановка ядер процессора Intel Core 2 Extreme QX6700 формально совпадает с таковой для предыдущих «экстремальных» двухъядерных процессоров, оснащенных технологией Hyper-Threading — например, Intel Pentium Extreme 965. Разница заключается лишь в том, что индексу «главного» ядра в том случае соответствует собственно индекс ядра, а индексу «дочернего» ядра — индекс логического процессора, входящего в состав ядра. Аналогия оказывается более чем полной.
Intel Core 2: тестовые испытания
Выше мы рассмотрели основные технологии управления производительностью и энергопотреблением процессоров семейства Intel Core 2 и особенность их реализации в этих процессорах. Самое время перейти к собственно испытаниям этих технологий.
Поведение технологий EIST и CxE в процессорах Intel Core 2 существенно аналогично их поведению в исследованных нами ранее процессорах Intel Pentium 4 и Intel Pentium M, с точностью до рассмотренных выше особенностей, связанных с многоядерной архитектурой процессоров. Намного больший интерес представляют технологии автоматической защиты процессора от перегрева — TM1 и TM2, получившие развитие в виде расширенного режима троттлинга. Тем более что ситуация перегрева четырехъядерного процессора, как выяснилось, оказывается далеко не такой уж и редкой…
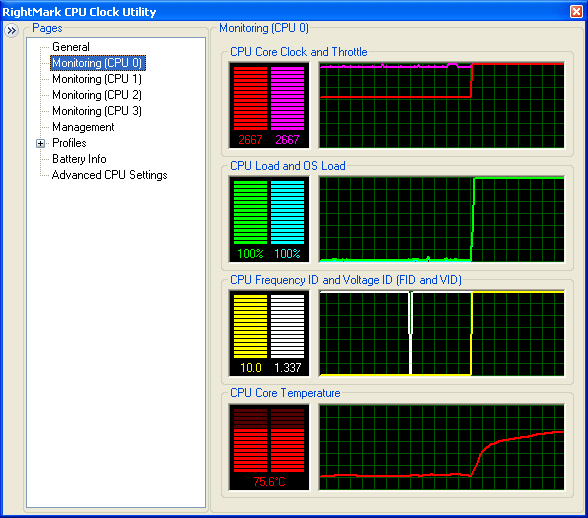
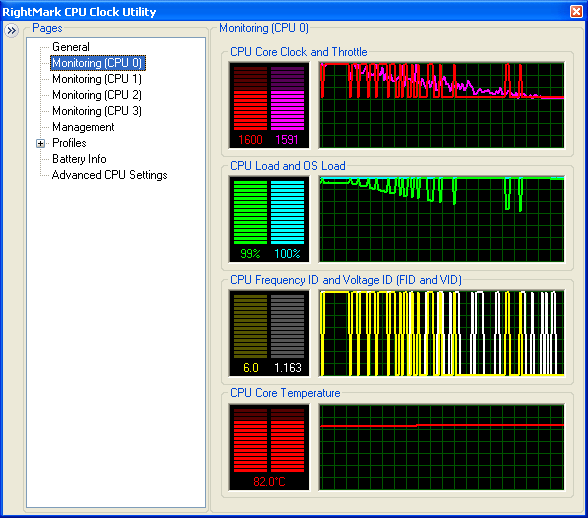
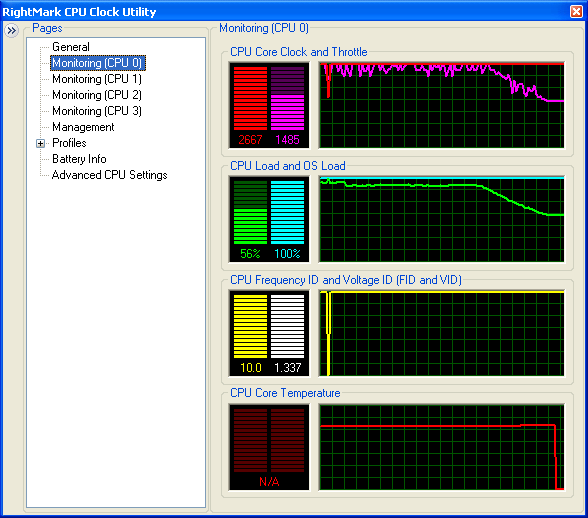
Для начала, рассмотрим вид кривых мониторинга (здесь и далее мониторингу подвергалось первое ядро процессора — «CPU 0», поведение остальных ядер оказывалось в существенной степени аналогичным) в случае простоя процессора.
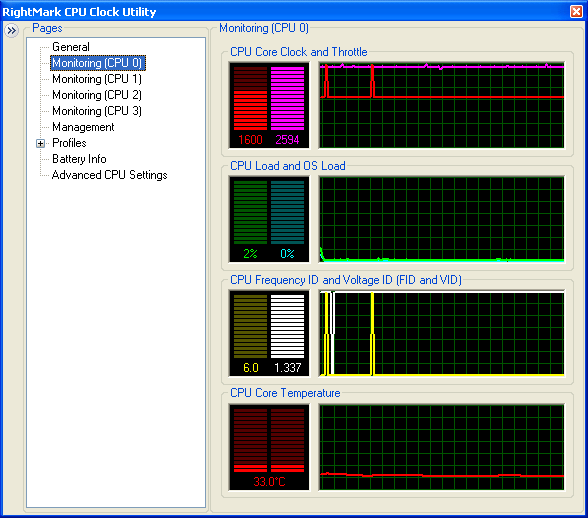
Видно, что «номинальная» частота ядра процессора оказывается сброшенной до минимального уровня — 1600 МГц (частоты шины 266 МГц, минимальный множитель 6x) за счет функционирования технологий улучшенного режима простоя CxE (в данном случае — C1E). В то же время, измерение «частоты троттлинга» процессора (под которой следует понимать реальную частоту ядра процессора) показывает почти максимальное значение, поскольку само измерение неизбежно является нагрузкой для процессора и выводит его из режима C1E в полностью «рабочее» состояние C0. Температура ядра процессора оказывается на минимальном уровне (порядка 33°C). Следует отметить особенность реализации технологии C1E в процессорах семейства Intel Core 2, заключающуюся в том, что запрашиваемое напряжение ядра процессора (VID), измеряемое при простое системы, как бы практически постоянно остается на максимальном уровне, тогда как множитель системной шины (FID) снижается до минимума. По-видимому, это является особенностью измерения VID на этом типе процессоров, поскольку сама по себе технология C1E по определению помещает процессор в режим минимального энергопотребления, характеризующегося минимальной частотой (FID) и напряжением (VID).
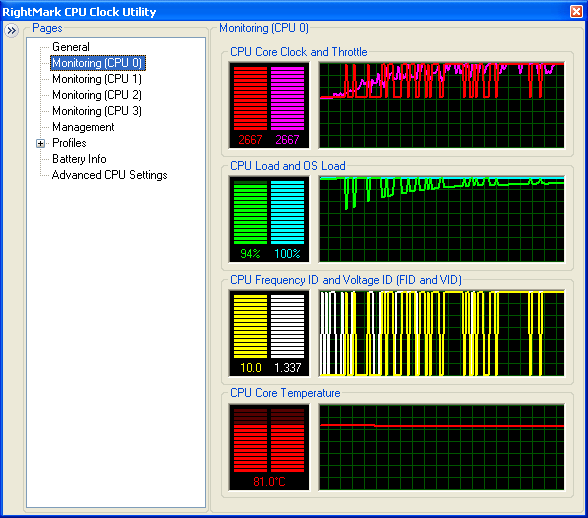
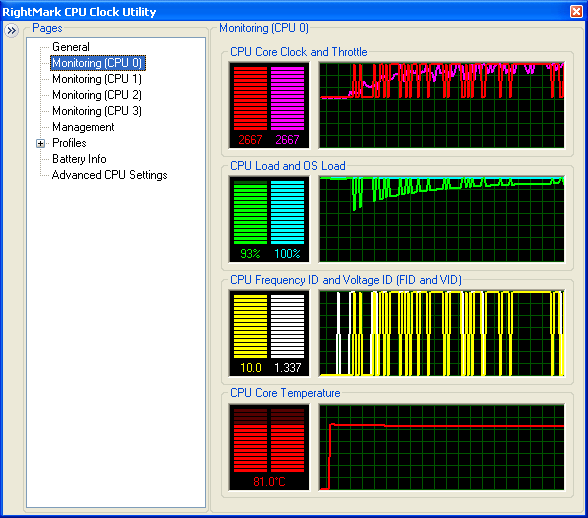
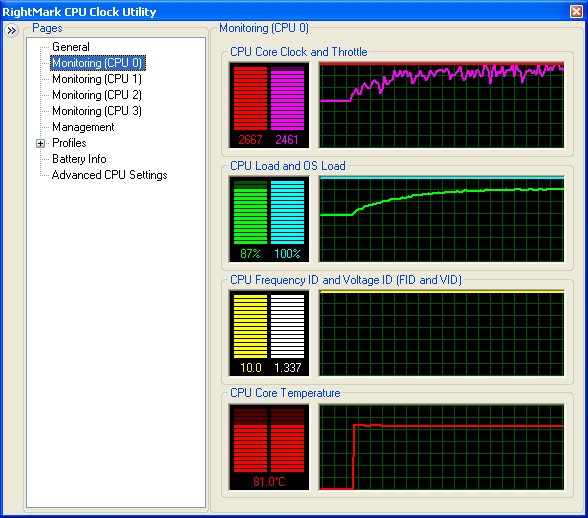
Подаем нагрузку на процессор, моделируемую простым тестовым приложением нашей собственной разработки (StressTest), в данном случае запущенным в четырехпоточном режиме для обеспечения полной загрузки процессора. Частота и загрузка процессора выходят на максимальный уровень, температура ядра очень быстро растет до весьма внушительных величин.
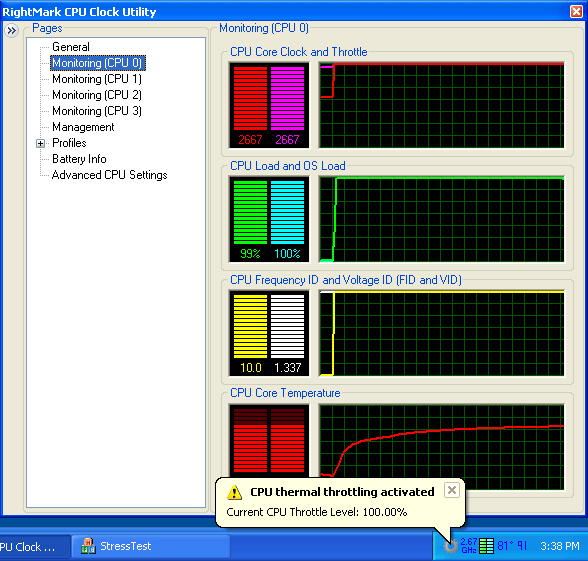
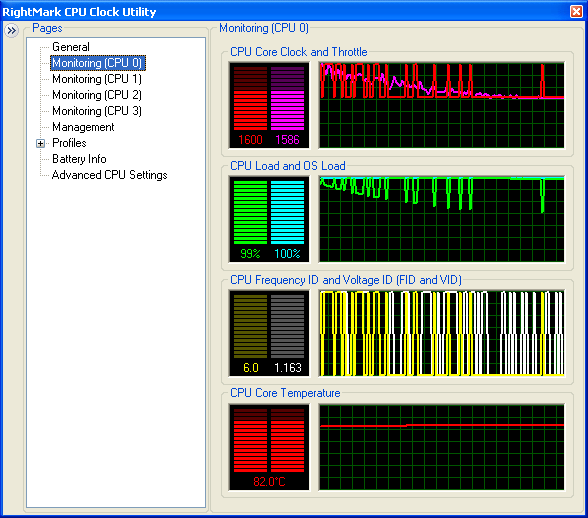
В скором времени, даже в условиях штатной системы охлаждения (надо заметить, весьма шумной!) можно лицезреть картину, представленную на приведенном выше скриншоте. Да-да, все именно так: мы наблюдаем порог срабатывания режима защиты процессора от перегрева. Температура ядра при этом составляет примерно 81°C.
Картина троттлинга в условиях штатного охлаждения разворачивается во времени примерно следующим образом.
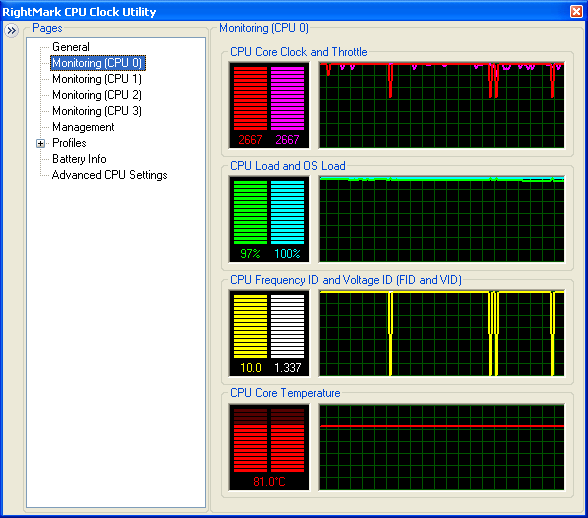
На кривых изменения тактовой частоты (а также множителя) процессора во времени легко заметить появление «скачков» до минимального уровня производительности — частоты 1600 МГц при множителе системной шины 6x. Из предыдущих исследований нам хорошо известно, что так работает технология защиты процессора от перегрева TM2. В данном случае (при включенных режимах TM1, TM2, Extended Throttling) она срабатывает в первую очередь, что выглядит вполне естественно, учитывая ее высокую эффективность. Кстати, о последней можно судить также по кривой изменения температуры ядра процессора — она остается на постоянном уровне 81°C. Наконец, по кривой реальной загрузки процессора (CPU Load) можно заметить, что производительность процессора снижается до уровня примерно 97%. Иными словами, хотя троттлинг и имеет место быть (в условиях штатного охлаждения процессора), его влияние на производительность процессора оказывается весьма минимальным.
Изучение троттлинга продолжаем следующим образом: с помощью утилиты SpeedFan снижаем скорость вращения вентилятора процессора до минимально возможного уровня. Полная остановка вентилятора нам не удалась, скорость его вращения снизилась примерно до 1000 об/мин.
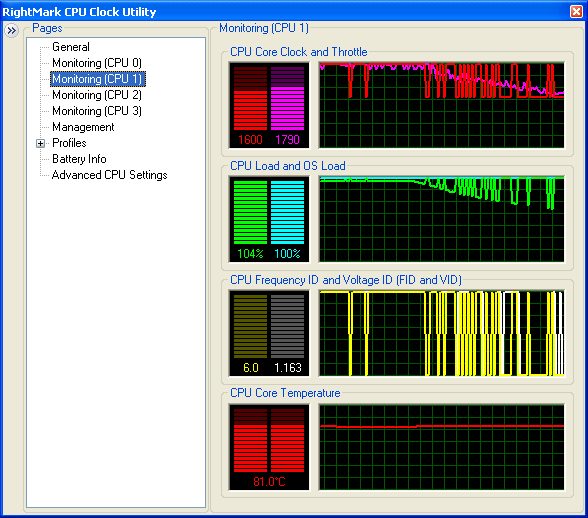
Достаточно быстро троттлинг процессора посредством TM2 достигает своей максимальной эффективности — «средняя» частота ядра постепенно снижается практически до минимальной отметки, примерно 1.7 ГГц. Это соответствует примерно 64% эффективной производительности ядра процессора, которую, к сожалению, напрямую нельзя увидеть по изменению кривой CPU Load. Дело в том, что последняя отсчитывается относительно текущей, а не «полной» частоты ядра процессора, и в силу ошибок измерения (связанных с множественными переключениями процессора между минимальной и максимальной частотой) она может оказаться даже выше 100%, в том случае, когда реально измеренная «средняя» частота ядра оказывается реально выше по сравнению с синтетическим мгновенным значением «текущей» частоты. Эффективность защиты процессора от перегрева остается на весьма высоком уровне — обратите внимание, насколько мало изменяется температура ядра процессора.
Принципиальных отличий не наблюдается и по мере продолжения испытания. Единственное отличие заключается в том, что «средняя» частота процессора падает до своего минимального значения (в условиях функционирования TM2), равного 1.6 ГГц. Увидеть режим «расширенного троттлинга» не удается в действии даже в этих условиях, при крайне малой скорости вращения вентилятора кулера процессора. Нам ничего не остается, как остановить его полностью, вручную.
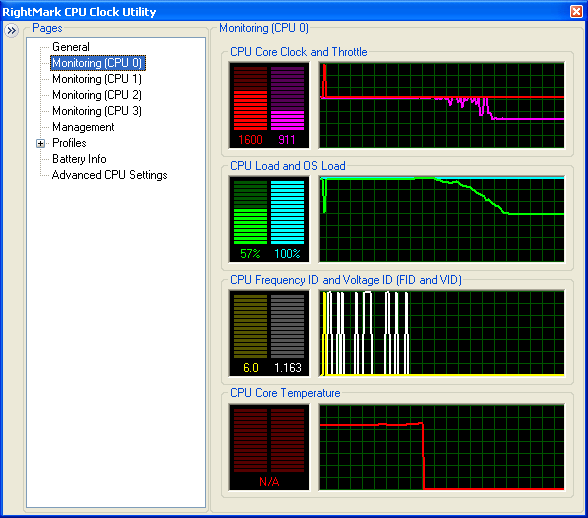
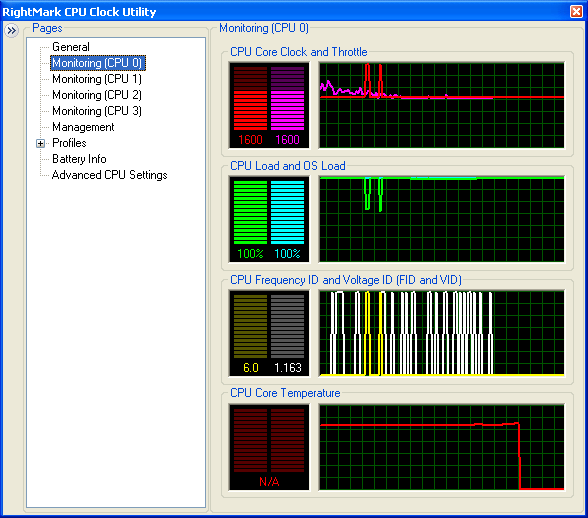
Extended throttling в действии! В реальности все оказалось так, как оно и описано в теории — при недостаточной эффективности TM2 в дело вступает технология TM1, суть которой заключается в модуляции тактовой частоты процессора вставкой «принудительно холостых» тактов. Последняя, измеренная относительно минимальной опорной частоты 1.6 ГГц, в условиях нашего эксперимента достигает отметки примерно 0.91 ГГц, т.е. 57% относительно минимальной частоты процессора, обусловленной действием TM2. По отношению к исходной, полной частоте процессора (2.67 ГГц), эта величина составляет примерно 34%. По-видимому, дальнейшее снижение частоты процессора невозможно даже при одновременном использовании TM2+TM1 в максимальной степени. Обратите внимание на график температуры ядра процессора — в момент экстренного срабатывания TM1 показания последней «исчезают»: цифровой датчик температуры ядра процессора перестает выдавать осмысленные значения, обнуляя при этом свой бит «reading valid», говорящий, как нетрудно догадаться, о корректности выдаваемого им значения. А это означает, что температура ядра процессора отныне не сохраняется на постоянном уровне (примерно 82°C) и продолжает расти. Действительно, устаревшая технология TM1, управляющая лишь эффективной частотой, но не напряжением ядра процессора, неспособна поддерживать его температуру в той же мере, что и технология TM2. По всей видимости, реальная температура ядра в этих крайне жестких условиях испытания продолжает неограниченно расти, пока не достигнет порога срабатывания датчика аварийного перегрева процессора и пока не произойдет принудительное отключение питания системы.
Однако мы не станем дожидаться этого момента, а возобновим активное охлаждение процессора. Сначала вернем установленные программно минимальные обороты вентилятора.
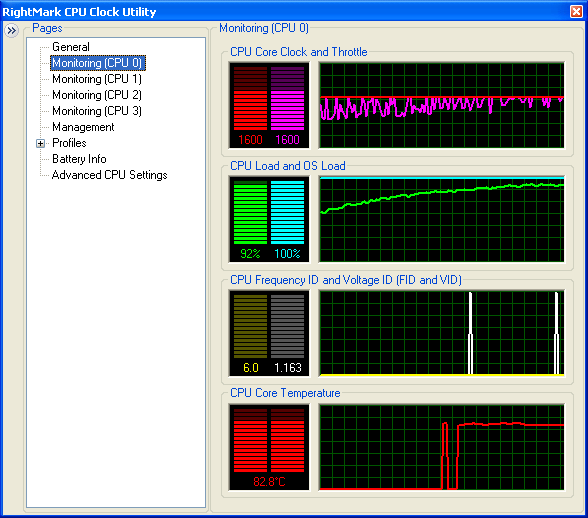
Троттлинг процессора (посредством TM1) весьма медленно сводится на нет, далее появляются первые признаки «оживления» TM2 в виде кратких попыток восстановления максимальной частоты процессора, наконец, возобновляется мониторинг температуры ядра процессора. Следом, возобновляем максимальное охлаждение процессора.
Получаемая картина существенно аналогична картине разворачивания троттлинга процессора посредством TM2, с точностью до обратного порядка следования событий во времени. Постепенно достигается уровень производительности процессора примерно 95%, реально наблюдаемый в условиях полной загрузки последнего при использовании штатной системы охлаждения.
Ради интереса, попробуем теперь отключить режим расширенного троттлинга, оставив при этом одновременно включенными TM1 и TM2. Снизим скорость вращения вентилятора до минимальной.
TM2 достигает своей максимальной эффективности, температура ядра сохраняется на постоянном уровне. Теперь полностью остановим вентилятор кулера процессора.
И увидим границу действия технологии TM2 — сперва исчезают всяческие попытки восстановления максимальной тактовой частоты ядра процессора, а его реальная частота снижается до минимальной. Далее пропадают показания цифрового датчика температуры. Однако, поскольку режим расширенного троттлинга более не используется, технология TM1 при этом не включается.
Восстановление активного охлаждения процессора приводит к возвращению практически максимального уровня производительности процессора.
Напоследок, изучим режим работы устаревшего механизма термической защиты процессора TM1 в чистом виде.
Снижение скорости вращения вентилятора до минимальной оказывается достаточным, чтобы быстро реализовать троттлинг процессора посредством технологии TM1 в полной мере. Опорная частота ядра процессора остается максимальной, однако его реальная частота достаточно быстро снижается до уровня примерно 56% (1.49 ГГц), уже знакомого нам по испытаниям режима расширенного троттлинга. При достижении максимального уровня троттлинга температура ядра процессора достаточно быстро выходит за допустимый предел, в связи с чем показания датчика температуры исчезают. Это лишний раз подтверждает, что технология TM1 оказывается намного менее эффективной по сравнению с TM2. В одинаковых условиях эксперимента эта технология не только приводит к более выраженному снижению частоты процессора, но и оказывается неспособной поддержать его температуру на постоянном уровне.
При возобновлении активного охлаждения процессора температура ядра процессора достаточно быстро возвращается в допустимые рамки, а уровень его производительности достаточно медленно достигает максимального уровня, равного примерно 87% от номинала.
Заключение и практические рекомендации
Проведенные испытания показали недостаточно высокую эффективность штатной системы охлаждения процессора Intel Core 2 Extreme QX6700, которая, к тому же, обладает весьма высоким уровнем шума. В условиях полной загрузки всех четырех ядер процессора штатная система охлаждения не справляется с нагрузкой и приводит к срабатыванию защиты процессора от перегрева посредством троттлинга. Рекомендованным решением этой проблемы является использование более эффективной системы охлаждения. Дополнительные исследования показали, что с этой задачей вполне могут справиться и неэкзотические системы воздушного охлаждения, вроде кулера Zalman CNPS9700NT.
Испытания троттлинга как такового в рассматриваемом процессоре показали весьма высокую эффективность реализации технологии Thermal Monitor 2 в плане поддержания температуры ядра процессора в допустимом пределе в течение длительного времени даже в условиях минимального охлаждения. Однако при возникновении внештатной ситуации, например, при полной остановке вентилятора системы охлаждения процессора в условиях полной загрузки процессора, технология Thermal Monitor 2 может оказаться уже недостаточно эффективной, что приведет к срабатыванию режима расширенного троттлинга — включению технологии Thermal Monitor 1 на фоне Thermal Monitor 2. Наши испытания показали, что в этих условиях температура ядра процессора уже не способна сохраняться в допустимом пределе, что может привести к ее дальнейшему возрастанию и, в конечном счете, к аварийному отключению питания системы. Таким образом, мы считаем, что к проблеме охлаждения четырехъядерных процессоров Intel, каковым является процессор Intel Core 2 Extreme QX6700, следует относиться весьма внимательным образом.