
Обзор робота-пылесоса Gutrend Echo 520
Паспортные технические характеристики, комплект поставки и цена
| Кинематическая система | два ведущих колеса и опорный поворотный ролик (плюс вспомогательный фиксированный ролик на блоке для совмещенной сухой и влажной уборки) |
|---|---|
| Способ сбора пыли | инерционное перемещение и вакуумная фильтрация |
| Пылесборник | одно отделение, емкость 0,48 л |
| Основная щетка | одна: ворс + резиновые скребки |
| Боковые щетки | две |
| Дополнительно | резиновый скребок |
| Режимы очистки | сухая уборка, а также сухая + влажная уборка в автоматическом режиме; запуск вручную с пульта или из приложения, запуск по расписанию; ограничение зоны уборки, выборочная уборка |
| Уровень шума | 50 дБ |
| Датчики препятствий | сканирующий лазерный дальномер инфракрасного диапазона (лидар), механический передний/боковой бампер, ИК-датчики приближения и перепада высоты, датчики вывешивания ведущих колес |
| Датчики ориентации | лидар, ИК-датчики поиска базы, датчики вращения опорного ролика и ведущих колес |
| Управление на корпусе | механические кнопки |
| Дистанционное управление | ИК-пульт ДУ, приложение для мобильного устройства |
| Оповещение | светодиодные индикаторы и звуковые сигналы, голосовое, с помощью мобильного приложения |
| Время автономной работы | 120 минут (уборка до 110 м²) |
| Время зарядки | до 300 минут |
| Способ зарядки | на зарядной базе с автоматическим возвратом или напрямую от блока питания |
| Источник питания | литий-ионный аккумулятор, 14,8 В, 2600 мА·ч, 38,48 Вт·ч |
| Масса | 2,45 кг |
| Размеры (диаметр×высота) | ∅325×96 мм |
| Комплект поставки |
|
| Ссылка на сайт производителя | Gutrend Echo 520 |
| Цена в официальном интернет-магазине на момент публикации | 33 490 руб. |
Внешний вид и функционирование

Робот-пылесос упакован коробку из гофрокартона, оснащенную пластиковой ручкой.

На плоскостях коробки изображен сам робот-пылесос, перечислены главные особенности, возможности и режимы уборки, указана комплектация, приведены основные характеристики. Большинство надписей на русском языке. Для защиты и распределения содержимого коробки используются формы из вспененного полиэтилена, пакеты из полиэтилена вспененного и листового, а также с пузырьками, коробки и вставки из гофрокартона. В комплект поставки входят все необходимые для работы аксессуары.

Запасные части и расходные материалы в комплекте поставки представлены сменным складчатым фильтром последней ступени, парой салфеток из микроволокна и набором (правая и левая) боковых щеток. Есть кисточка, которую можно использовать для чистки пылесборника и самого робота, комбинированный инструмент для очистки основной щетки, салфетка из микроволокна для очистки датчиков. Приложены краткое и подробное руководство на русском языке. Качество текста хорошее, как и качество полиграфического исполнения.
Корпус робота изготовлен из пластика в основном с практичной матовой поверхностью. Верхняя часть — темно-синяя, а нижняя — черная.

На верхней панели в передней части есть две кнопки. Нажатие на большую со значком питания запускает или останавливает уборку, а длительное удерживание небольшой кнопки запускает режим подключения к сети Wi-Fi. Значок питания подсвечивается красным или белым, горит ровно или мигает в зависимости от состояния робота. Синяя или красная подсветка небольшой кнопки помогает понять текущий режим подключения к сети.

Дополнительно о своем состоянии робот информирует с помощью короткого звукового сигнала (раздается только при нажатии на кнопку питания на корпусе или на пульте) и голосового оповещения, проговаривая фразы на русском языке (в приложении можно загрузить и английский языковой пакет). Громкость голосового оповещения регулируется с помощью пульта или приложения, а отключить его совсем можно только в приложении, там же задается интервал времени, когда робот будет молчаливым (режим «не беспокоить»). Громкость звукового сигнала не регулируется и его нельзя отключить.
Робот оснащен системой ориентации, основой которой является сканирующий лазерный дальномер инфракрасного диапазона (лидар). Лидар установлен в башенке на верхней панели. Через горизонтальные «бойницы» этой башенки можно разглядеть объективы излучающего лазерного диода и фотоприемника. Лазерный диод и фотоприемник установлены на роторе, который вращается в горизонтальной плоскости, и именно это позволяет роботу получать данные о расстоянии до препятствий с обзором в 360 градусов по горизонтали несколько раз за секунду. То есть, в отличие от большинства моделей, робот не обязательно должен подъезжать к препятствию вплотную, чтобы определить его наличие. Кроме того, дистанционное определение препятствий и их геометрии позволяет роботу составлять карту помещения и отслеживать свое собственное местоположение. Робот «знает», где он находится, где находится базовая станция (при запуске с нее), где он уже убрал, где нужно убрать и где в периметре территории еще остаются неисследованные участки. Нужно учитывать то, что лидар работает в плоскости на определенной высоте от пола, то есть все, что ниже или выше, робот «не видит». Впрочем, на случай «ниже» робот оснащен механическим бампером и ИК-датчиками препятствий за ним. Вариант препятствий, находящихся выше плоскости действия лидара, в теории может приводить к некоторым проблемам, так как крыша башенки находится над этой плоскостью. Отметим, что высота робота даже с башенкой не очень большая (у нас получилось 79,5 мм до верхней точки бампера и 97 мм до верха башенки), что увеличивает доступную для уборки площадь.

Пылесос имеет почти идеально круглую форму диаметром 332-336 мм (здесь и далее по тексту приведены результаты наших измерений).

Края сзади снизу скошены, что помогает роботу преодолевать препятствия, а выраженный бортик сверху и выступы на бампере снизу снижают вероятность того, что пылесос будет застревать под мебелью с небольшим просветом от пола или пытаться забраться на слишком высокие препятствия.

Масса робота равна 2,46 кг.
На днище расположены две контактные площадки, передний опорный поворотный ролик, боковые щеточки, крышка батарейного отсека, два ведущих колеса, отсек основной щетки. Ближе к краю сразу за бампером находятся три ИК-датчика перепада высоты, благодаря которым робот-пылесос может избежать падения со ступенек.

Передний ролик изготовлен из черного упругого пластика чередующегося с белым и жестким. Сделано это не просто так, а для того, чтобы робот с помощью оптического датчика, расположенного под роликом, мог определять, перемещается ли он во время уборки или нет.
Оси ведущих колес расположены на одном диаметре окружности корпуса, это позволяет роботу совершать разворот на месте без изменения границ, занимаемой им площади. Положительную роль играет и гладкий по периметру корпус. Ведущие колеса диаметром 67 мм оснащены резиновыми покрышками с выраженными грунтозацепами. Колеса установлены на подпружиненных шарнирах, имеющих ход в 26 мм, что также улучшает способность робота преодолевать препятствия. Всю переднюю половину корпуса огибает подпружиненный бампер с небольшим ходом.

Сдвиг бампера вызывает срабатывание механических датчиков препятствий. Расстояние от пола до нижней точки бампера равно 13 мм, значит, потенциально на ступеньку такой высоты робот сможет заехать. Для защиты мебели спереди на бампер в нижней его части наклеена полоса из мягкой резины. Выше на бампере за окошком из тонированного пластика находятся ИК-датчики обнаружения препятствий, базовой станции и, возможно, приемник команд с пульта ДУ. Какие-то датчики, по всей видимости, также находятся за тонированными вставками на корпусе за бампером ближе к задней части пылесоса.

Нажав на фиксатор сзади, можно отсоединить пылесборник от корпуса робота. Корпус пылесборника выполнен из слегка тонированного прозрачного пластика, поэтому степень его заполнения можно попытаться оценить, рассмотрев содержимое через заднюю стенку. Специальная шторка из прозрачного пластика предотвращает выпадение мусора через отверстие для входа воздуха. Верхняя часть пылесборника откидывается на большой угол, что позволяет без труда вытряхнуть скопившийся мусор или почистить пылесборник обычным пылесосом с щелевой насадкой. Для полной очистки нужно вынуть предварительный сетчатый фильтр, стряхнуть с него легкий мусор, и при необходимости почистить складчатый фильтр тонкой очистки.

Специальный флажок не дает закрыть крышку пылесборника, если в него не установлена рамка с сетчатым фильтром. Отметим, что вентилятора в самом пылесборнике нет, поэтому пылесборник и фильтр-сеточку можно мыть под водой, главное потом все хорошо высушить. Складчатый фильтр производитель рекомендует менять через 6 месяцев эксплуатации.
Боковые щеточки имеют длинную и относительно мягкую пластиковую щетину, пучки которой выходят из упругих поводков. Как показала практика, эта щетина хорошо сохраняет форму. Правая и левая щеточки отличаются поворотом поводков, а чтобы пользователь знал, какую куда устанавливать, на щеточках и на днище есть выпуклые буквы L и R. К осям приводов щеточки крепятся с помощью пластикового упругого фиксатора, что очень удобно.
Вал основной щетки гладкий и относительно большого диаметра — это облегчает освобождение вала просто пальцами без помощи инструментов от ниток, волос и прочего намотавшегося. Щетина на этой щетке относительно мягкая, а резиновые лопасти-скребки тонкие, нежесткие, но упругие. Пучки щетины и лопасти идут волнами, что уменьшает звук от вращения щетки в контакте с полом. Стальная ось в торце щетки вращается в подшипнике скольжения, запрессованном во втулку из упругого пластика, которая по замыслу разработчиков должна снижать шум и вибрации. Щетка в узле фиксируется рамкой из черного пластика. На этой рамке есть резиновый скребок, который помогает щетке подхватывать мусор с пола и забрасывать его в пылесборник. Скребок установлен на своей подпружиненной рамке, которая может с ходом порядка 2 мм перемещаться вверх-вниз, следуя рельефу пола. Перемычка на этой рамке снижает вероятность того, что робот будет наматывать на щетку уголки ковриков или что-то подобное.

Отметим, что редукторы приводов щеток и колес позволяют их проворачивать рукой, это очень помогает, когда нужно вытащить робота, например, из-под дивана, под которым он застрял, или распутать что-то намотавшееся на колеса или щеточки.
При уборке передние боковые щеточки подгребают мусор к центру, затем частички мусора закидываются основной щеткой в пылесборник, а поток воздуха помогает засасывать в пылесборник самый легкий мусор. Упругие прокладки под крышкой пылесборника, под рамкой фильтров и на входе в отсек вентилятора снижают паразитный подсос воздуха мимо фильтров и пылесборника.
Для влажной очистки гладких полов вместо обычного пылесборника нужно установить входящий в комплект поставки специальный блок с баком для воды.

На дно блока на липучке прикрепляется махровая салфетка из микроволокна.
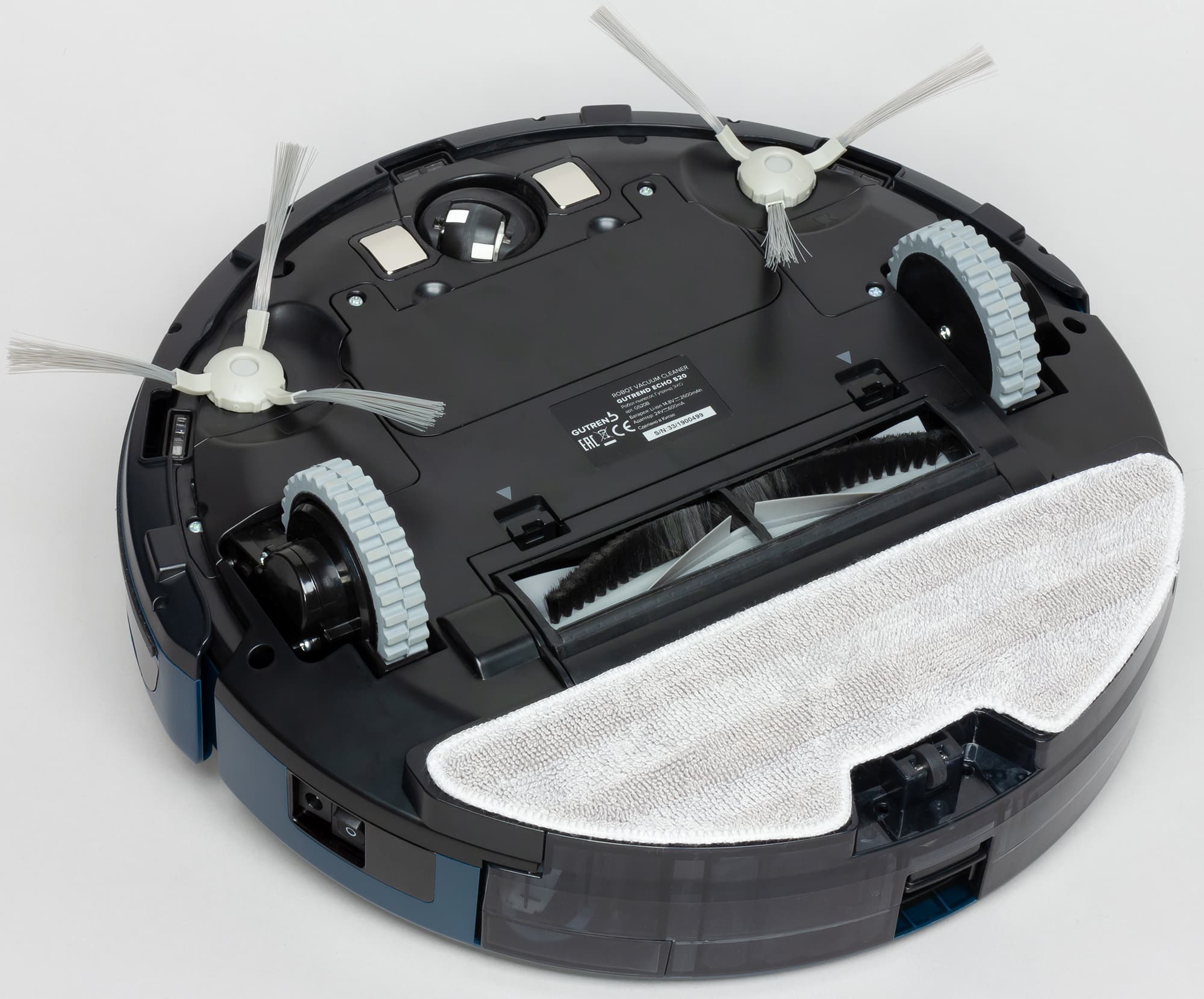
Салфетку можно предварительно увлажнить, а для поддержания ее во влажном состоянии, в бак нужно залить воду. Жидкость на салфетку просачивается через четыре отверстия в днище, прикрытые волокнистым материалом. Электрический насос, установленный в блоке для влажной уборки, дозирует вытекание воды. Скорость подачи воды регулируется с помощью приложения для мобильных устройств. В процессе уборки нужно следить за уровнем воды, чтобы при необходимости долить воду в бак. Влажная протирка пола совмещена со сбором мусора. Чтобы обеспечить эту функциональность в блоке для влажной уборки есть отсоединяемый контейнер для мусора, оснащенный сетчатым фильтром и таким же складчатым фильтром, что и у большого контейнера для сухой уборки. Согласно нашим измерениям, объем бака для воды и объем контейнера для сухого мусора в блоке для влажной уборки составляет чуть более 190 мл у каждого. Второй объем определялся при заполнении рисом.

Перед зарядкой робота блок для влажной уборки нужно снять.
На правом боку находится разъем питания для прямой зарядки аккумулятора и клавиша, отключающая батарею от основных цепей робота. В данном роботе установлена литий-ионная аккумуляторная батарея. Батарейный блок составлен из четырех цилиндрических элементов популярного типоразмера 18650. Сборка из элементов и защитного контроллера стянута термоусаживающейся трубкой и убрана в защитный корпус из пластика.

База, на которой пылесос заряжается, имеет относительно большое основание.

Снизу на основание наклеены резиновые противоскользящие ножки.

Питается база от внешнего адаптера питания, который также можно использовать для зарядки робота, минуя базу, если по какой-то причине она недоступна. Длина кабеля от адаптера равна 1,5 м.
К пылесосу прилагается небольшой ИК-пульт дистанционного управления.

Кнопки пульта изготовлены из упругого резиноподобного материала, обозначения на кнопках достаточно крупные и контрастные.
Для помощи в пространственном планировании уборки предназначена ограничительная магнитная лента. Ее можно наклеить на гладкую поверхность или спрятать под тонким покрытием пола. В комплекте поставки присутствует отрезок такой ленты длиной 1 м.

Фактически данный робот-пылесос имеет два режима уборки: автоматический и ручной.
В ручном режиме уборки направление движения робота задается с помощью кнопок пульта дистанционного управления. Робот поворачивает на месте с фиксированным шагом по углу при нажатии на стрелки вправо-влево на пульте, движется вперед, пока нажата стрелка вверх, и назад пока нажата стрелка вниз.
В автоматическом режиме, как пишет производитель, при запуске с базы робот будет убирать или пока не уберет всю доступную площадь, или до снижения заряда батареи ниже критического уровня (ниже 20% — определено экспериментально). Во втором случае, робот вернется на базу, зарядит аккумулятор, затем продолжит уборку с того места, где закончил. Сколько циклов уборки с промежуточными подзарядками сможет сделать робот не уточняется.
Во время уборки нажатие на кнопку со значком вентилятора на пульте меняет мощность всасывающего вентилятора робота (всего три уровня, которые перебираются по циклу). Выбранный уровень, по всей видимости, сохраняется и при последующих запусках робота.
Фирменное приложение, устанавливаемое на мобильные устройства с Android (видимо, и iOS) на борту, расширяет функциональность робота.
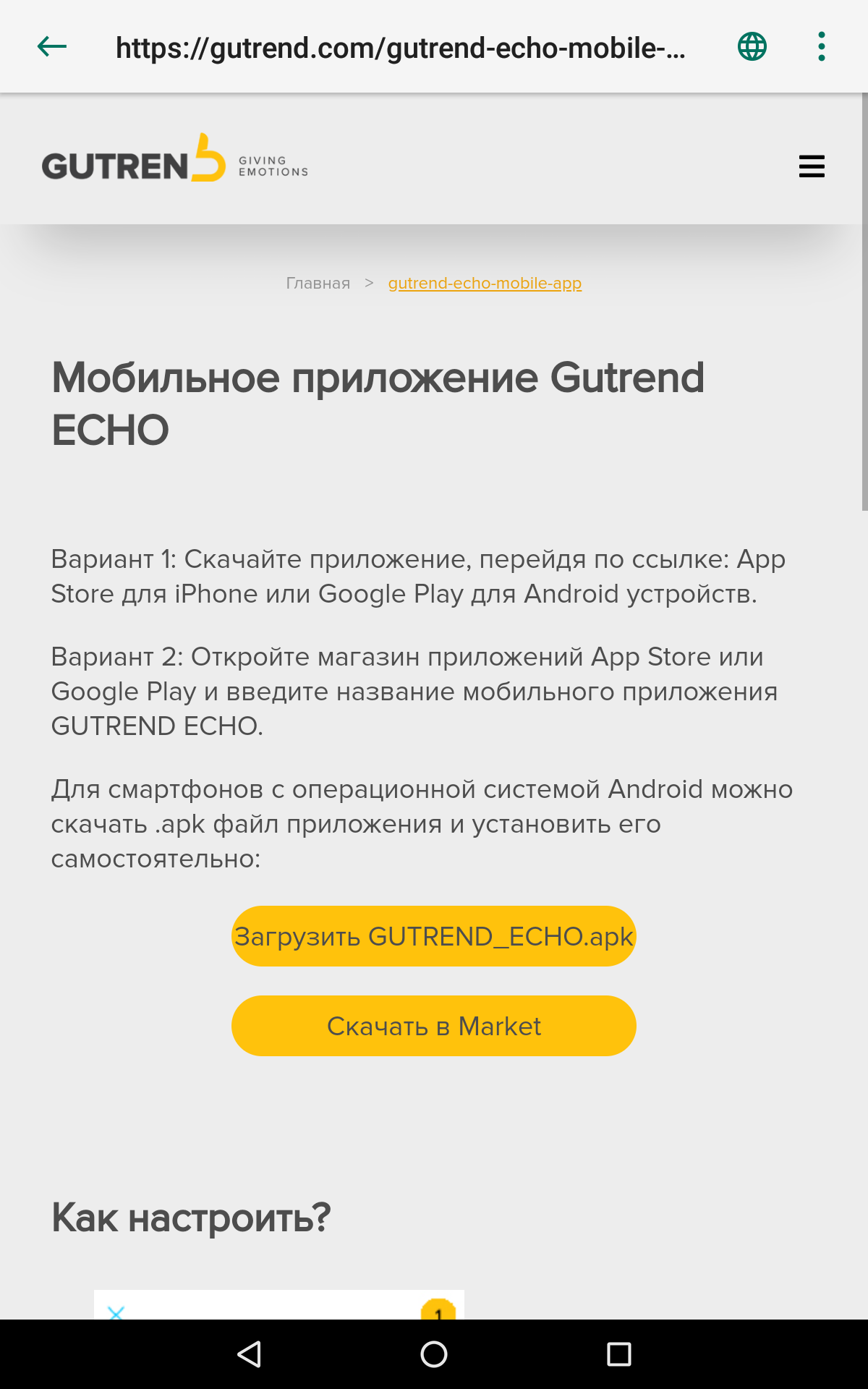
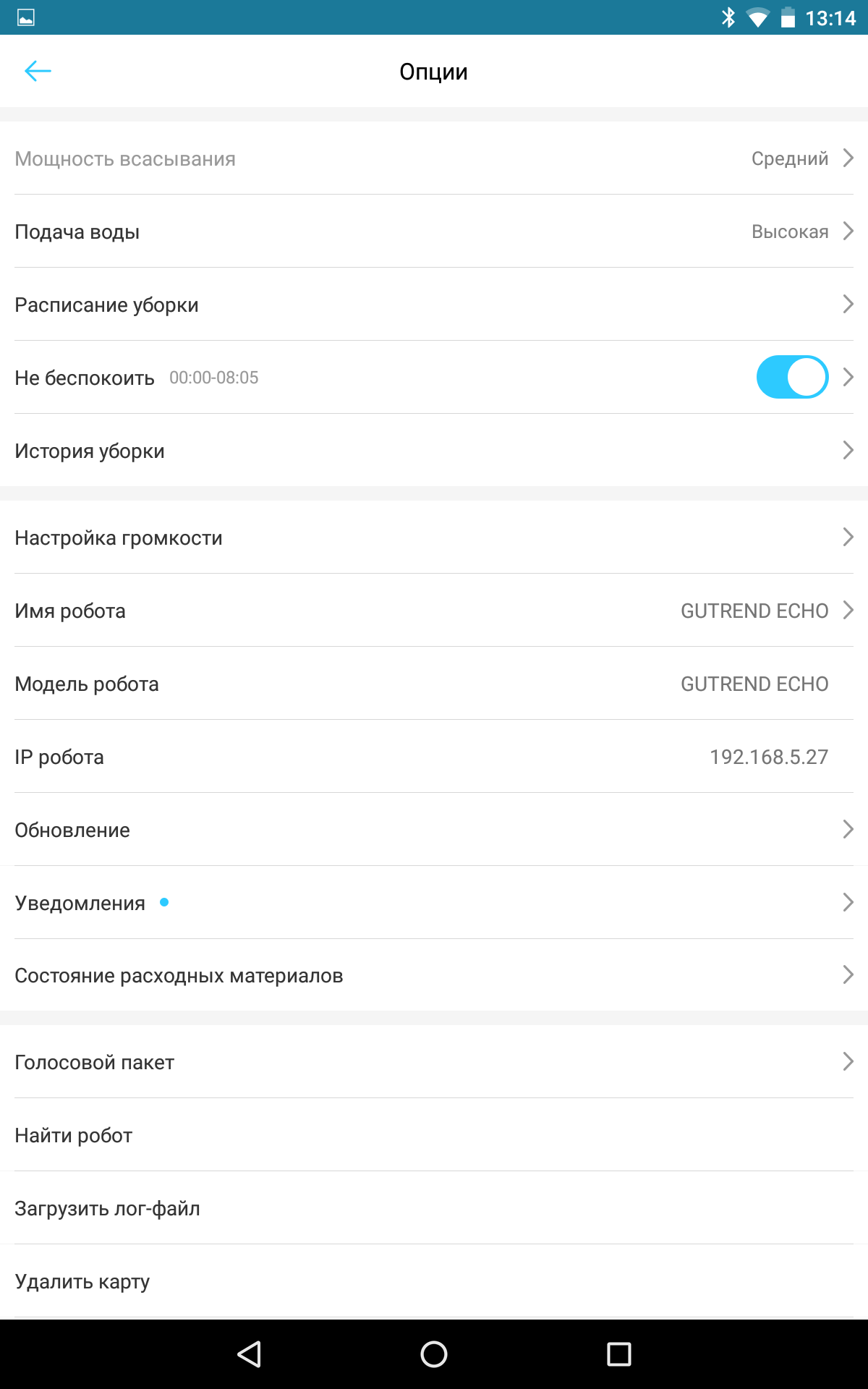
Запустив приложение первый раз, нужно установить связь с роботом, который должен быть в радиусе действия Wi-Fi-сети (поддерживается только 2,4 ГГц). Для управления роботом используется глобальный облачный сервис (необходима регистрация), поэтому доступ к роботу можно получить из любого места, где есть Сеть. С помощью приложения робот запускается на уборку, уборка приостанавливается или принудительно завершается, также робот по команде пользователя отправляется на базу. В приложении можно задавать расписание уборки, управлять мощностью вентилятора и скоростью подачи воды, отслеживать ресурс щеток и фильтра, а функция Найти робот поможет это сделать — робот скажет фразу: «Я здесь!». И еще функции приложения: просмотр сведений о выполненных уборках, регулировка громкости голосовых оповещений, задание периода молчания, редактирование имени робота, обновление ПО робота, просмотр уведомлений, загрузка голосового пакета, удаление робота из приложения и удаление карты. Карту робот строит во время уборки, и, по всей видимости, сохраняется только одна карта. При запуске в новом месте, чтобы не вводить в заблуждение навигационную систему робота, старую карту лучше удалить — робот построит новую. С картой связаны две полезные функции: можно задать прямоугольные области двух типов — в которых нужно выполнить уборку и которые следует избегать. Областей каждого типа может быть до 10 штук.
Тестирование
Ниже представлены результаты тестирования по нашей методике, подробно описанной в отдельной статье. Последовательные запуски на уборку:
| Время уборки, ММ:СС | % (суммарный) |
|---|---|
| 13:06 | 94,6 |
| 14:51 | 98,8 |
| 12:45 | 99,1 |
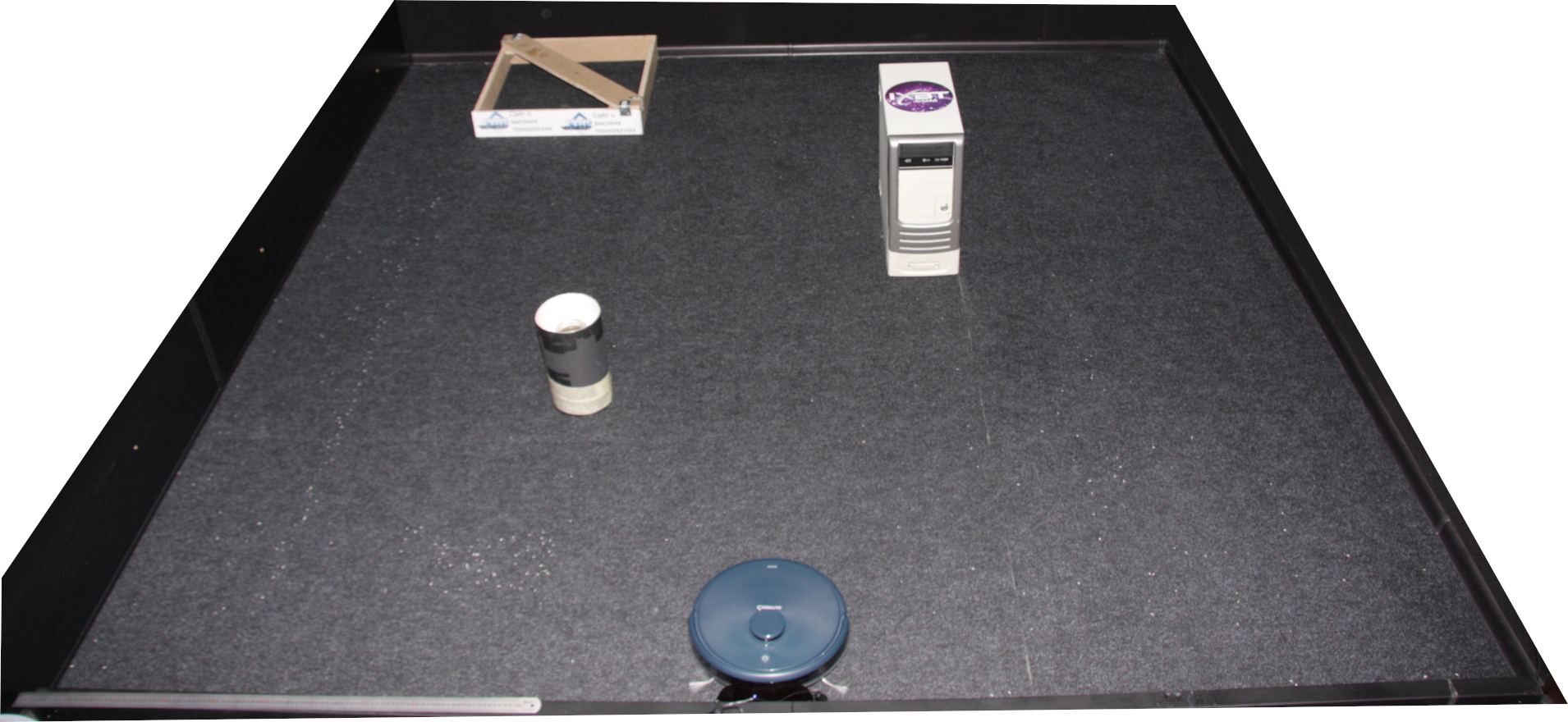
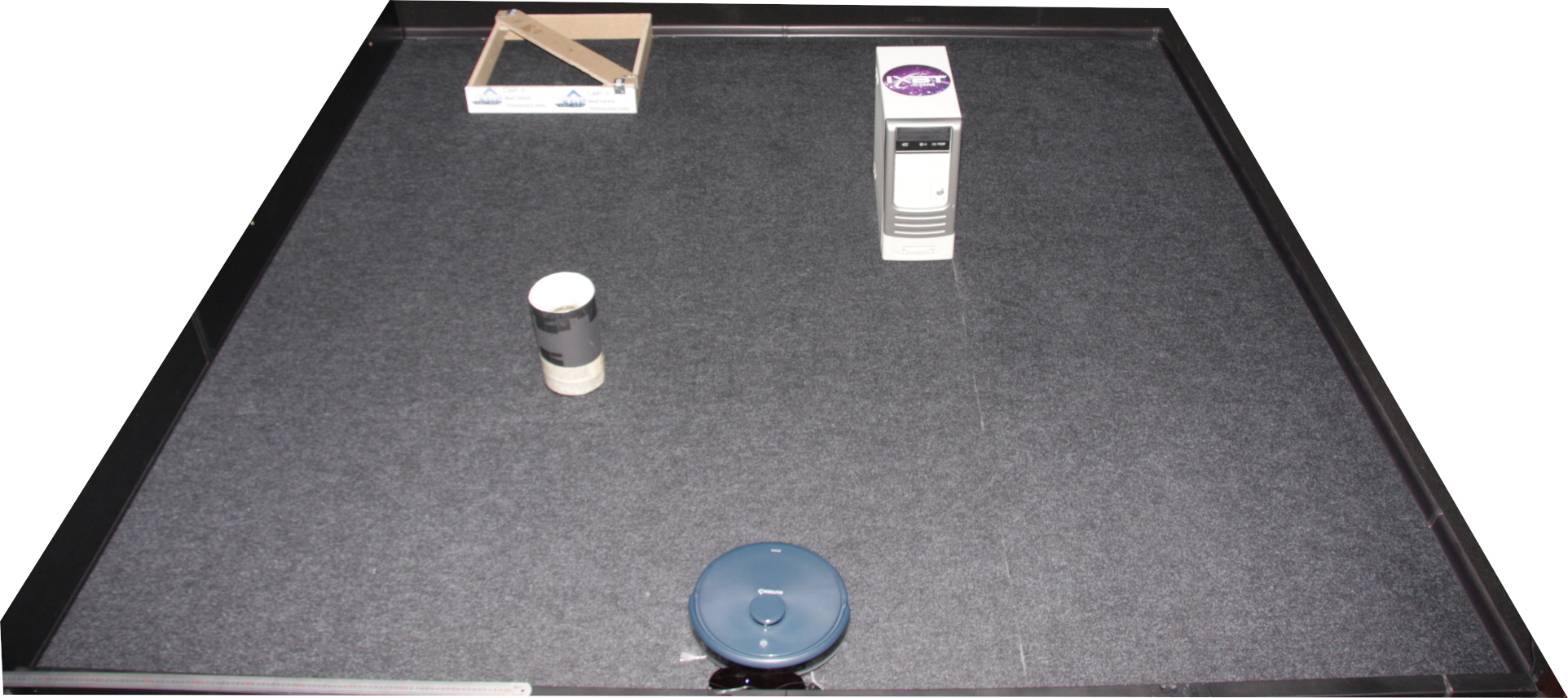
Видео ниже снято с одной точки с почти полным охватом убираемой территории, база находится внизу по центру, при обработке часть видеоряда ускорена в десять раз, через несколько секунд после запуска мощность всасывания установлена на максимум, первый запуск на уборку:
Уже после первого цикла уборки собрано очень много тестового мусора:
Робот пропустил один небольшой участок и немного промахнулся во время одного прохода змейкой, оставив полоску из неподобранного мусора. В узком загончике, в углах и около базы мусора очень мало:


После третьего цикла практически идеальная чистота:
Отметим высокую эффективность сбора мусора с пола — там, где робот проехал, риса на полу уже практически не остается. Некоторое снижение эффективности уборки связано именно с ошибками навигации, но их причина отчасти кроется в особенности тестового помещения, часть стен которого не отражает луч лидара. В таких условиях роботу для надежного определения своего местоположения не хватает нескольких предметов, от которых луч отражается хорошо. Это показывает недостаточно проработанный алгоритм навигации. Как пример небольшого сбоя можно показать карту тестового помещения, построенную роботом после одного из запусков:
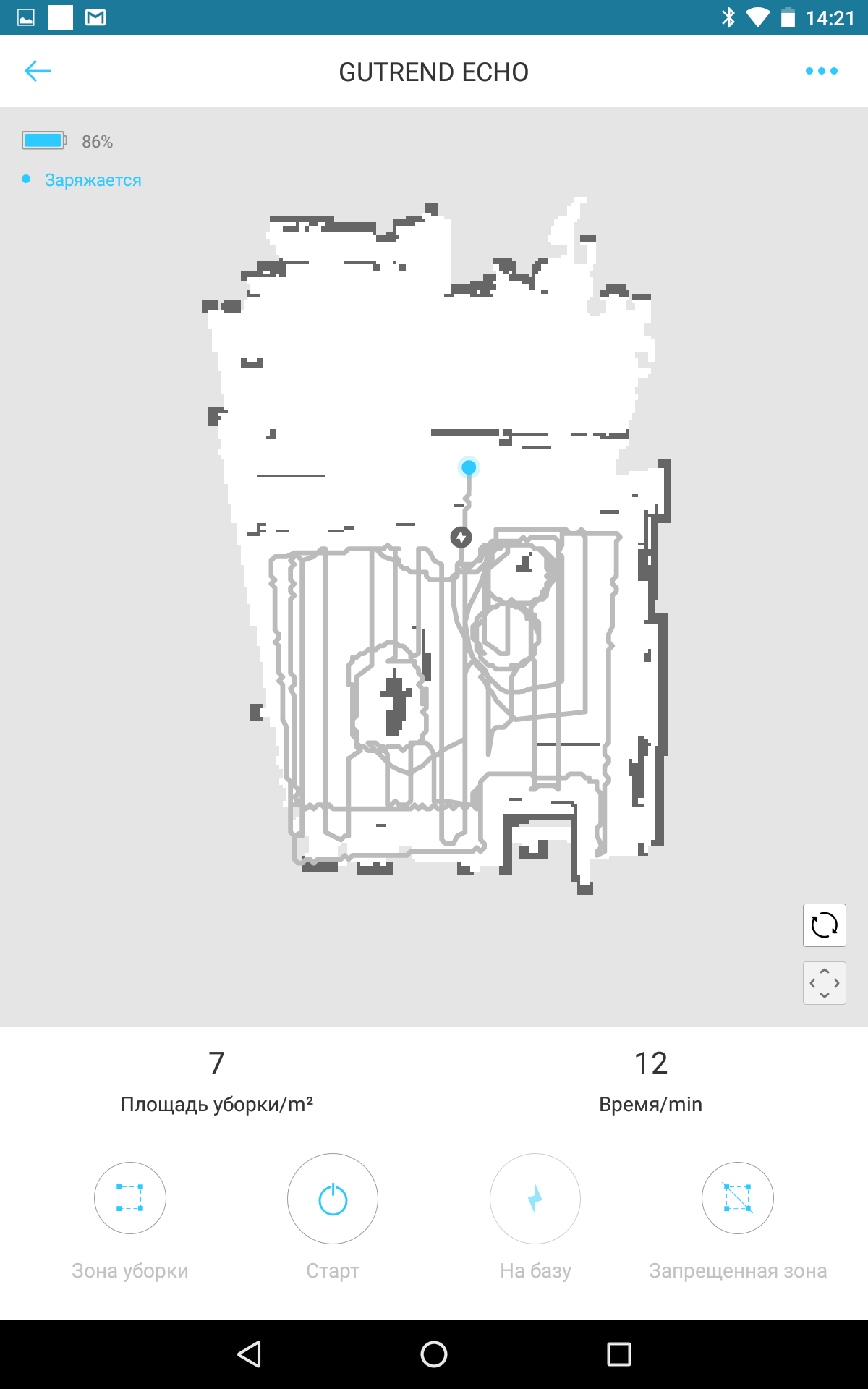
Сбой выявляется по тому, что на карте оказалось две банки (два кружка), а припарковался робот (голубая точка вверху) со сдвигом относительно первоначального положения базы (кружочек с молнией). Забегая вперед отметим, что в обычном помещении с более-менее светлыми стенами явные сбои в навигации отсутствуют.
В случае нашего тестового участка в начале уборки робот обходит по периметру доступную для уборки площадь, а затем, двигаясь змейкой, проходит внутреннюю часть территории, и возвращается к тем местам, которые он еще не убрал.

Лидар используется как для навигации, так и для определения препятствий. Впрочем, определив наличие впереди стены, робот свернет в сторону, но коснется стены краем бампера, как бы проверяя, действительно ли проехать нельзя. В некоторых случаях, не доверяя лидару, робот все равно подъедет к препятствию, вплоть до срабатывания механического датчика в бампере. Робот умеет двигаться вдоль относительно светлых стен, сохраняя минимальную дистанцию, видимо, ориентируясь на показания боковых ИК-датчиков, но периодически все равно касается стены краем бампера. Если робот сохраняет ориентацию, то с базой он обращается очень аккуратно, но и убирает около нее хорошо. Вот в случае сильного сбоя в навигации робот может затолкать базу в угол, подъехав к ней сбоку по стеночке. Отметим, что в наших тестах робот всегда продолжал убирать или искать базу, несмотря ни на какие трудности, тогда как многие умные роботы с продвинутой навигацией, потеряв ориентацию, останавливаются, и сообщают пользователю о своей проблеме.
Дополнительно были проведены натурные испытания. Для этого в офисном и относительно чистом помещении был выгорожен участок из нескольких комнат общей площадью примерно 94 м². В коридоре (23 м²) только шкаф в торце, в других помещениях заполнение мебелью среднее, людей нет. Схема помещения приведена ниже. На ней цветными прямоугольниками отмечены доступные роботу комнаты. База робота установлена на схеме внизу справа:
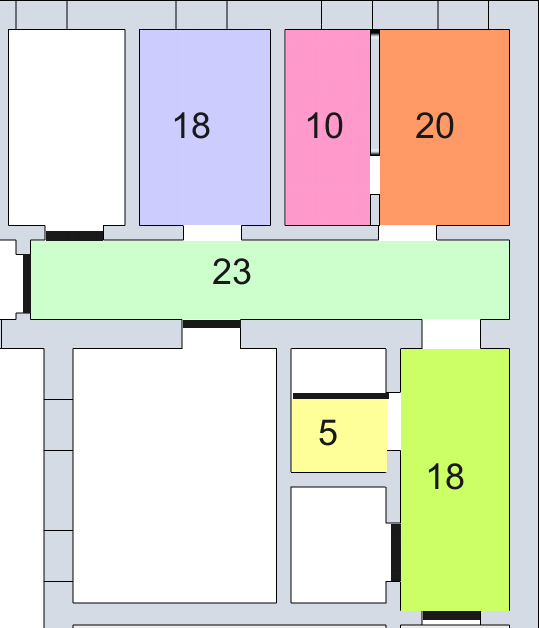
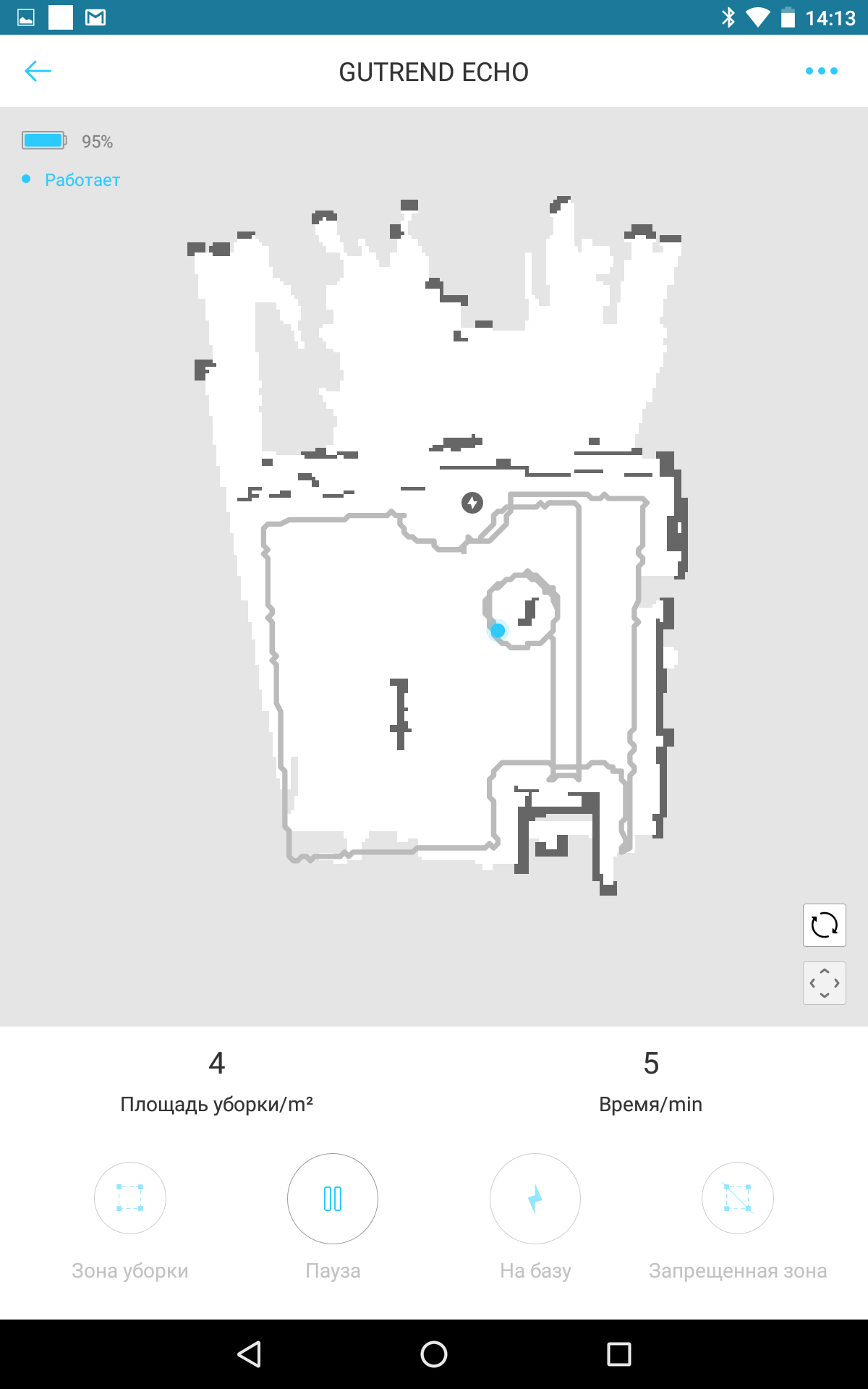
Робот работал на максимальной мощности всасывания в течение 86 минут до снижения уровня заряда батареи ниже 20%. После чего быстро и практически кратчайшим путем вернулся на базу. За один цикл робот убрал почти везде и тщательно, не смог убрать только часть коридора площадью примерно 6 м². То есть на одном заряде и в режиме максимальной мощности робот может убрать площадь порядка 88 м², с учетом пространства занятого мебелью. Сам робот сообщил о 64 м² убранной площади. Разумеется, чем свободней будет площадь, тем больше робот ее уберет на одном заряде, так как будет меньше тратить времени на объезд препятствия. Убирая большое помещение, робот делит его на участки порядка 4 на 4 метра, без учета стен и т. д., обходит их по периметру, затем внутри змейкой, потом вычищает пропущенные места, после чего переходит к следующему участку. Серия снимков экрана с картой поясняет этот процесс:
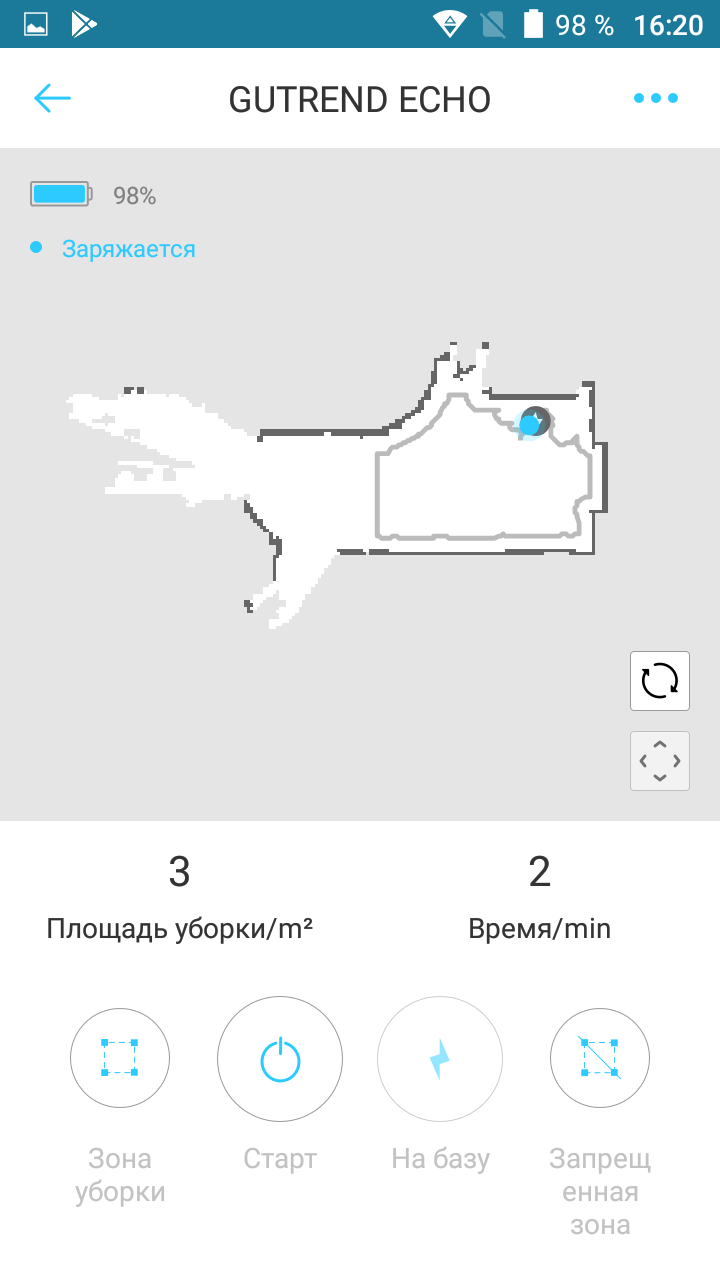
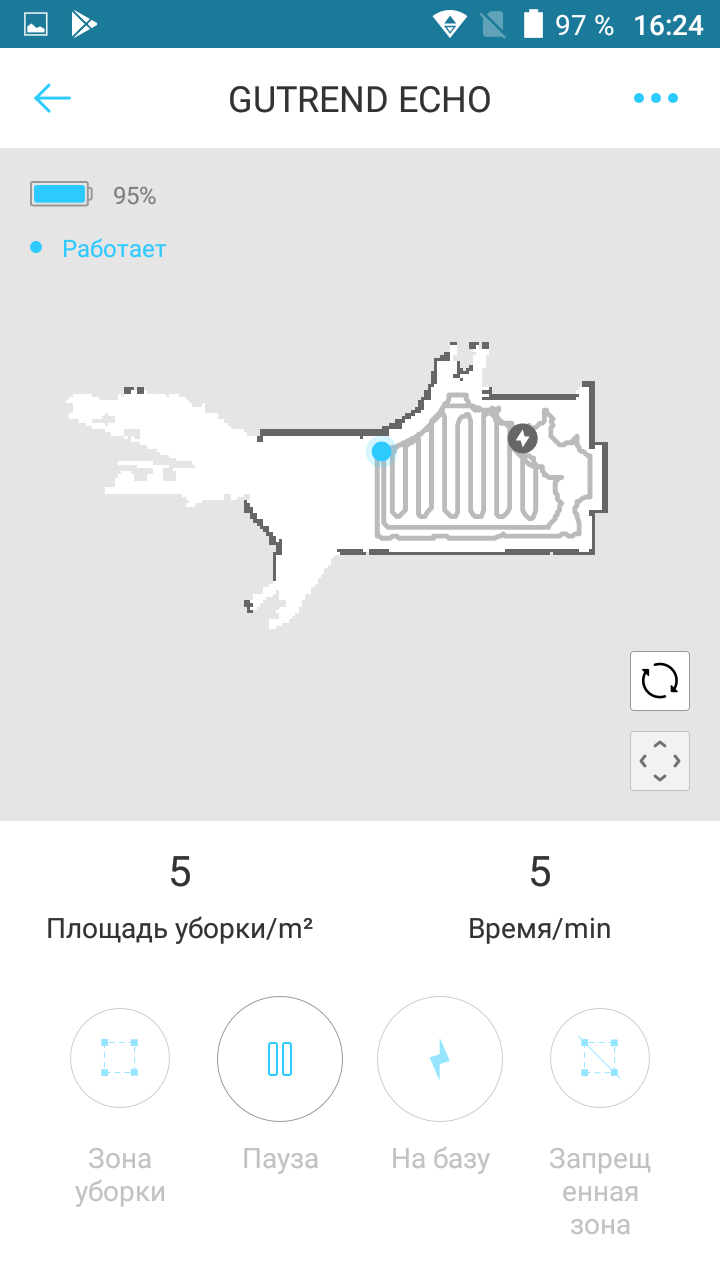
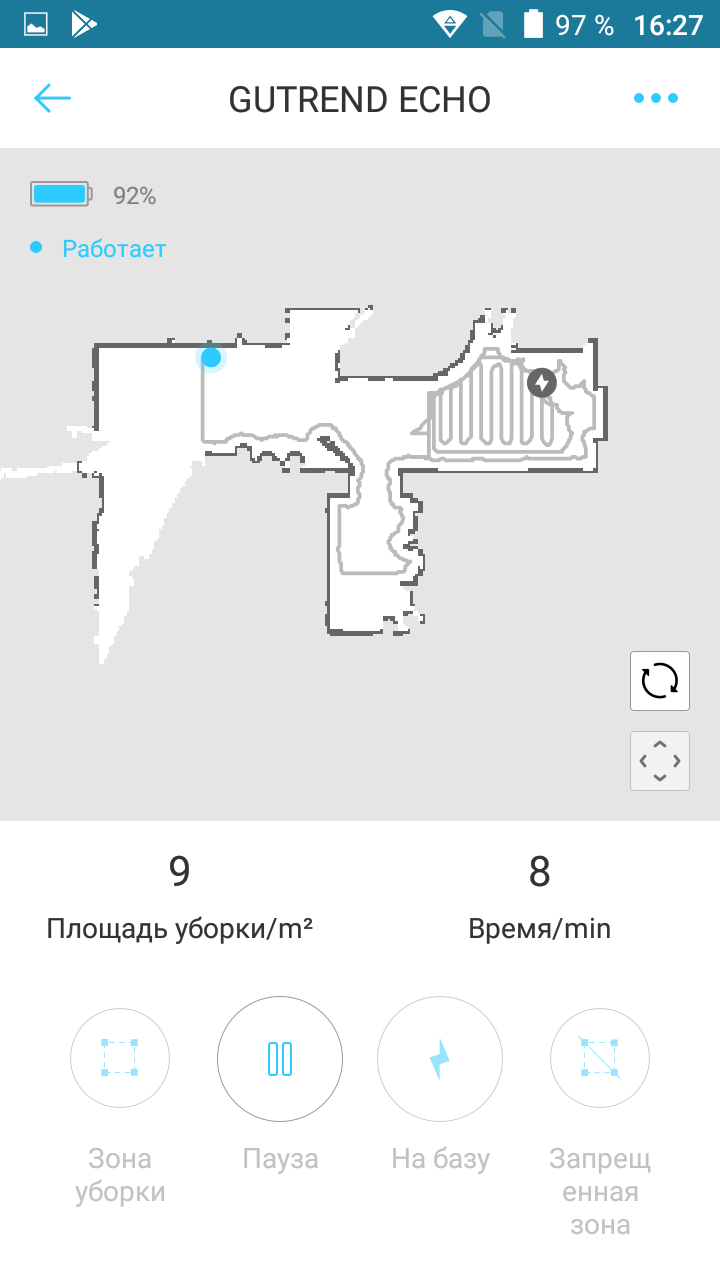
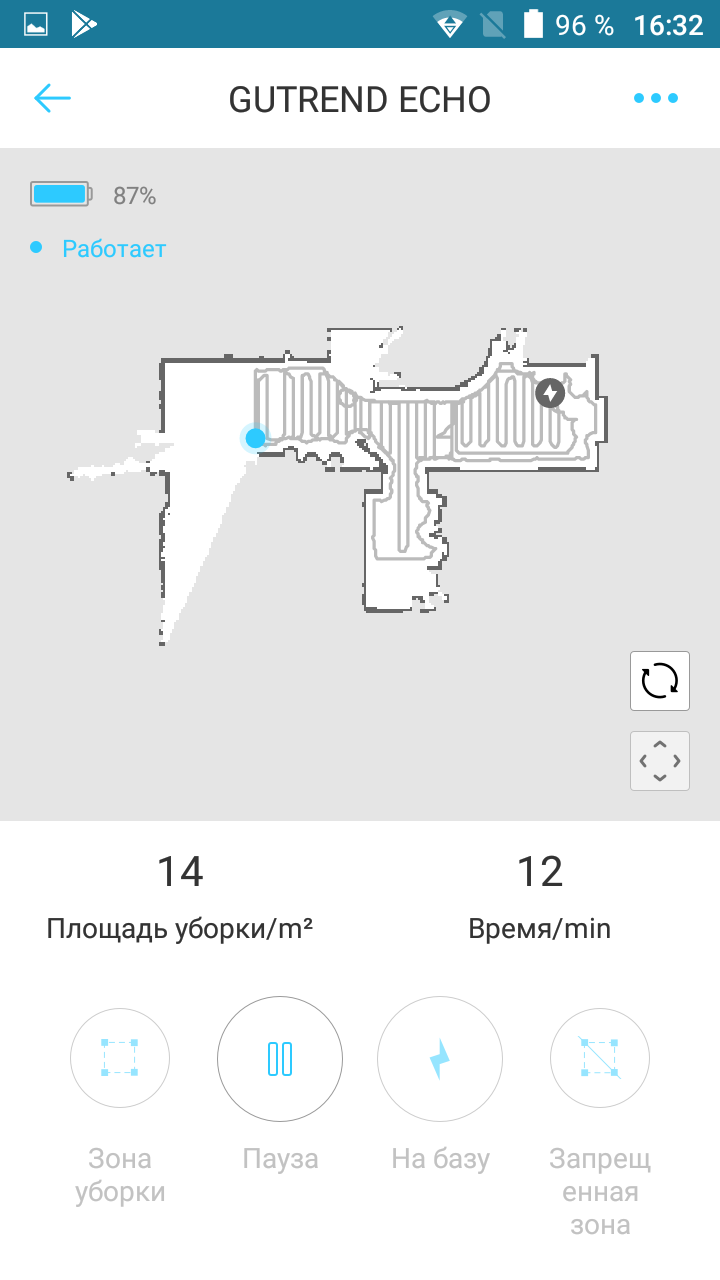
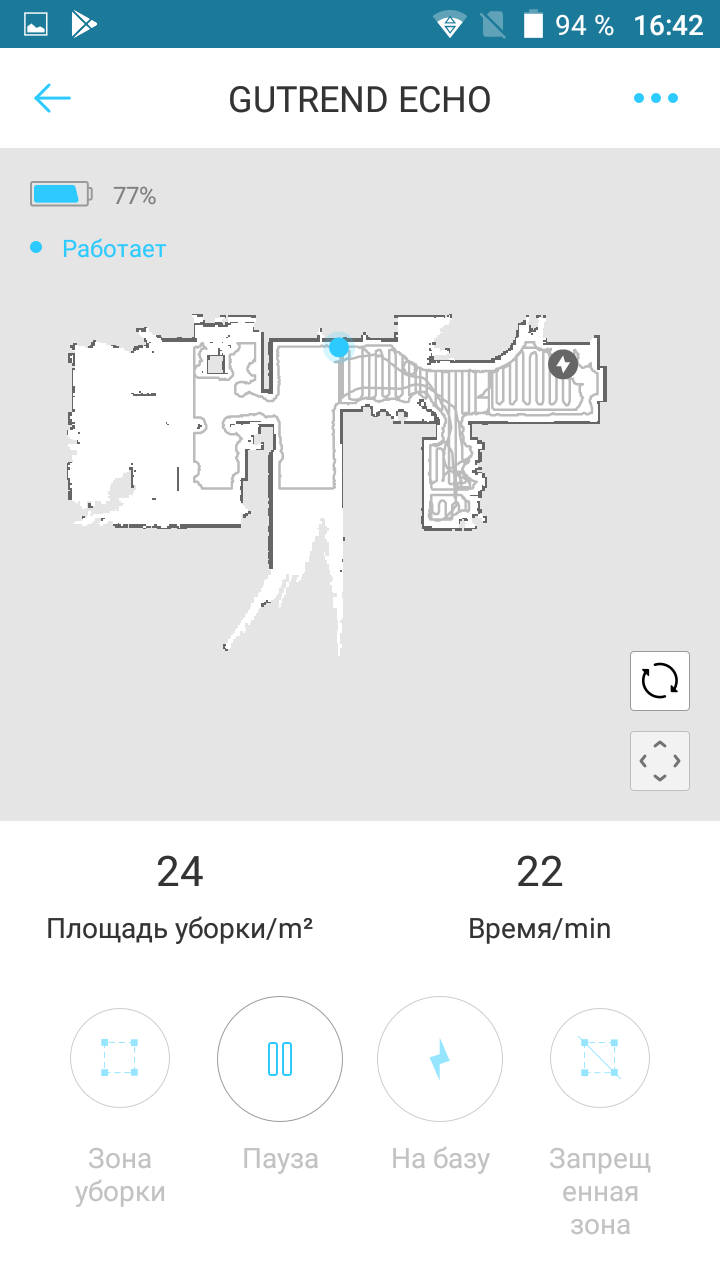
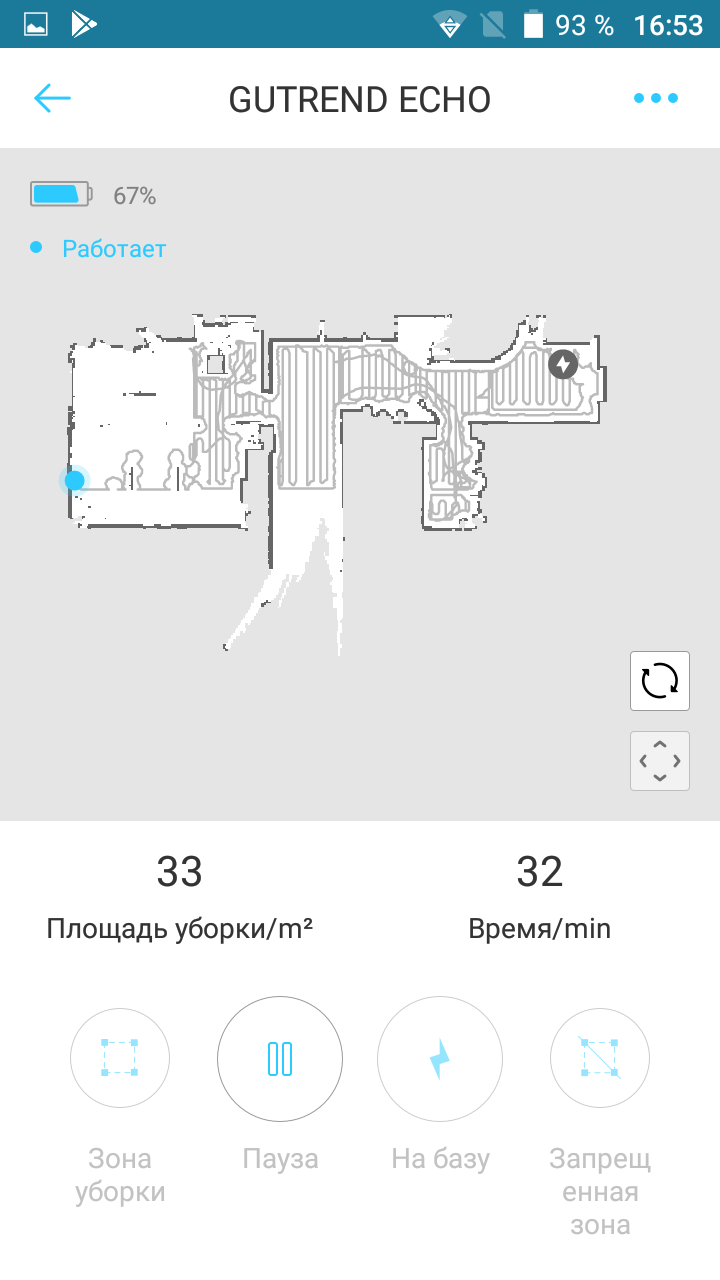
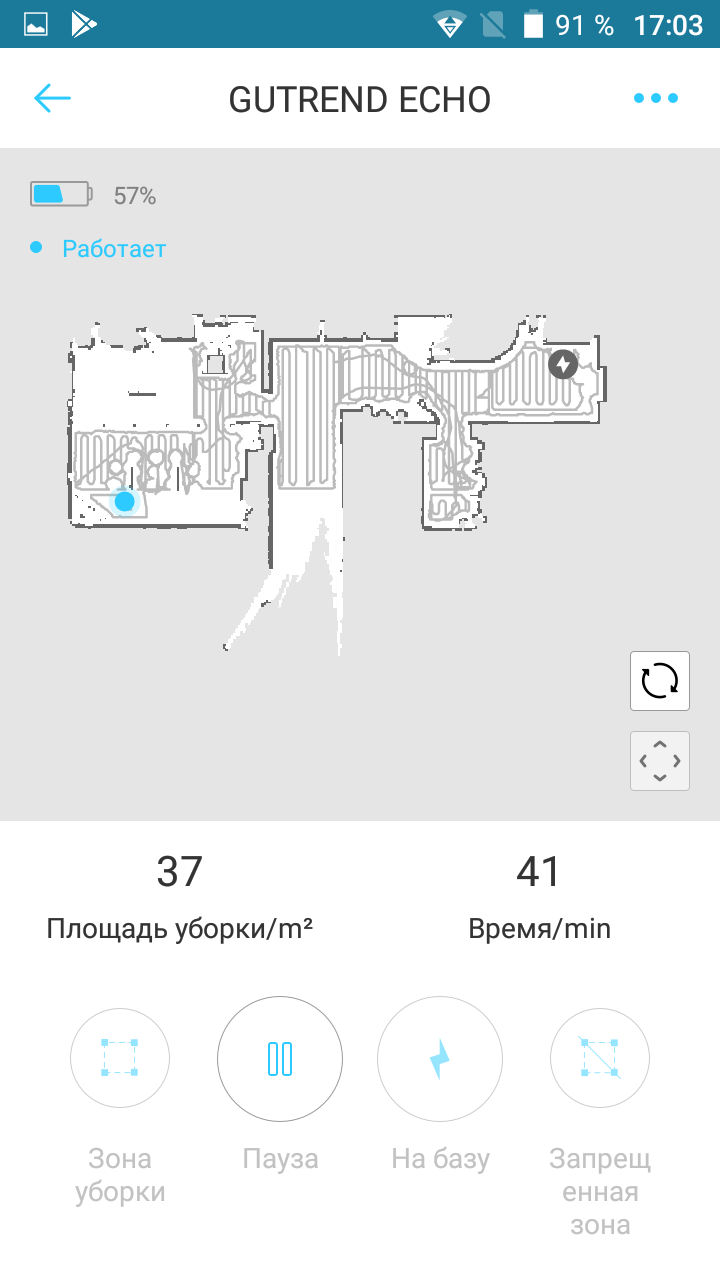
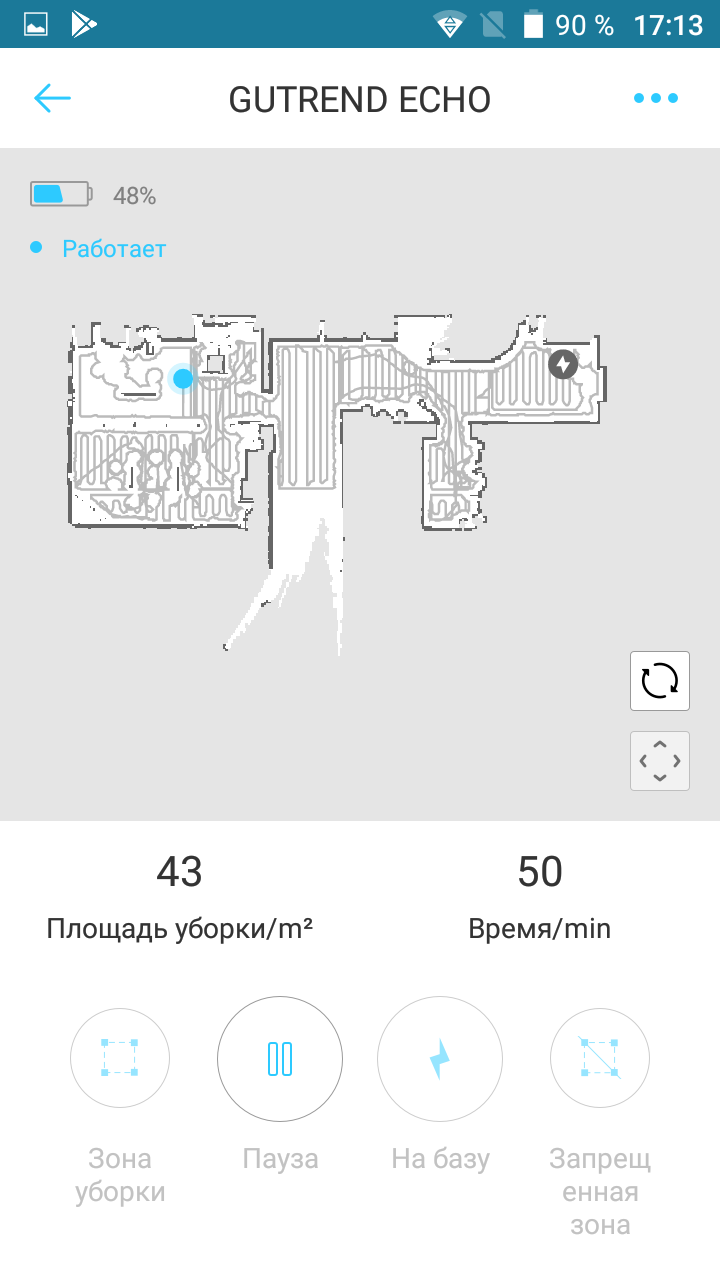
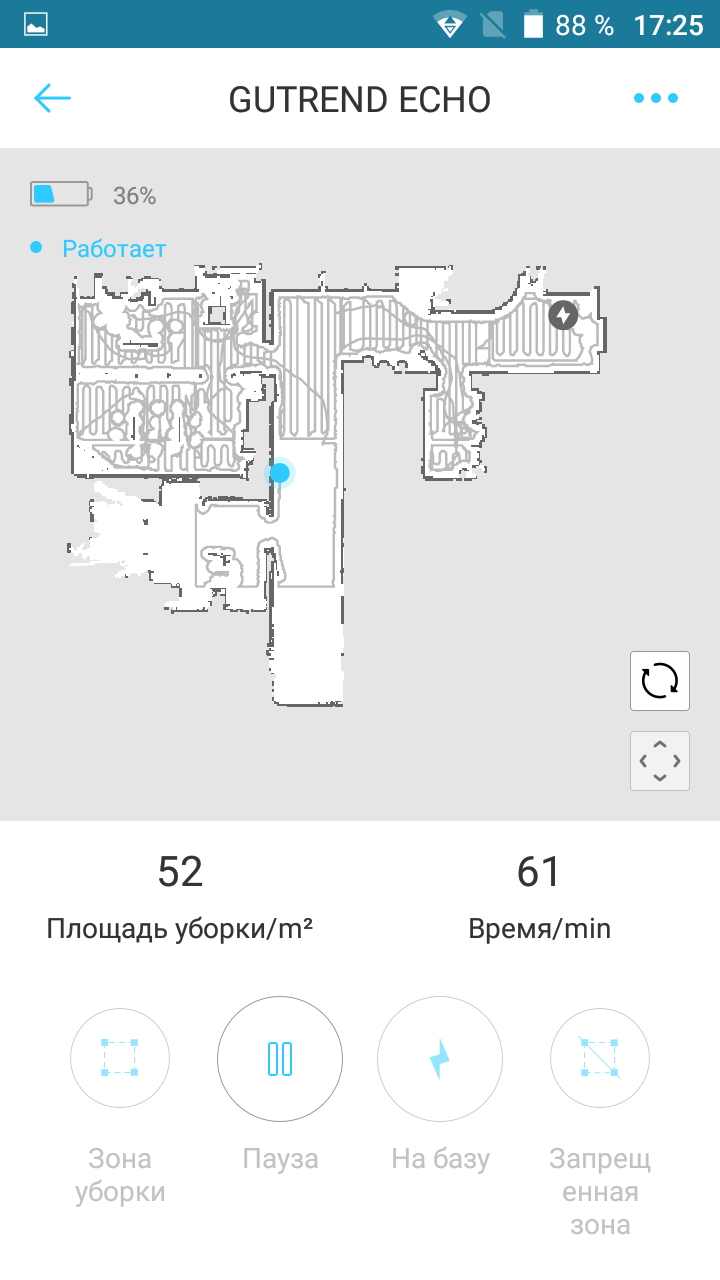
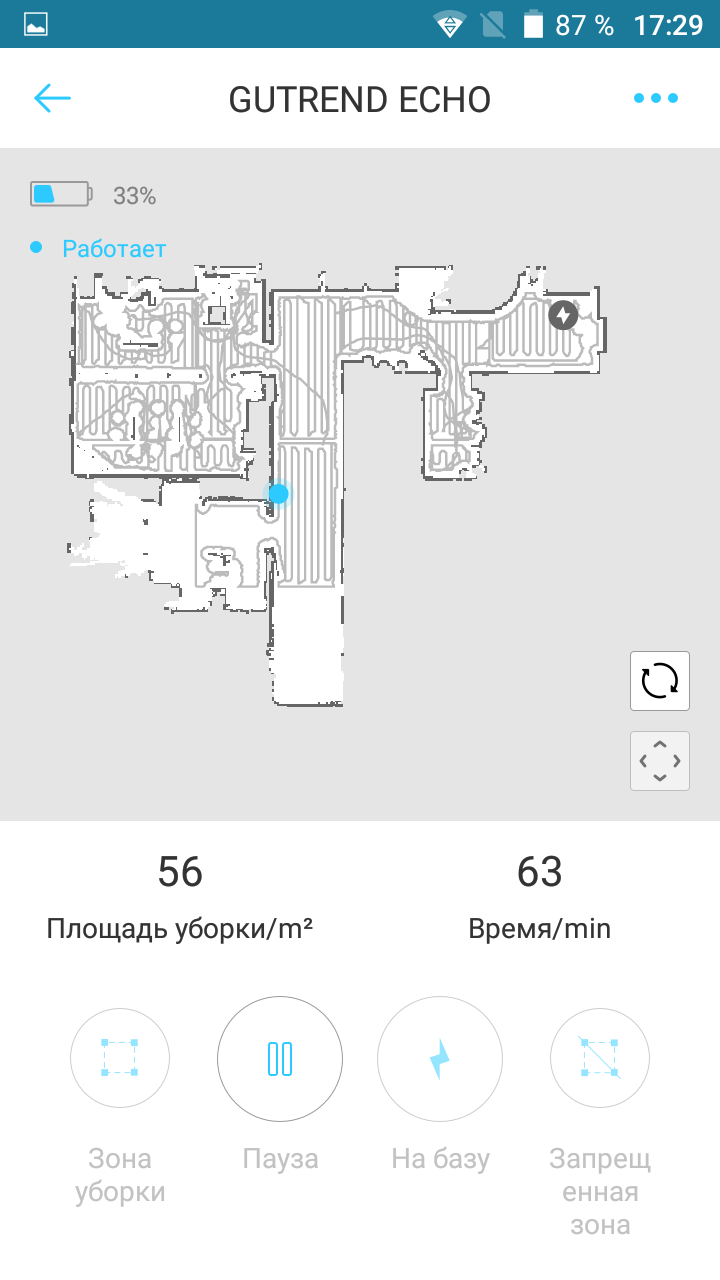
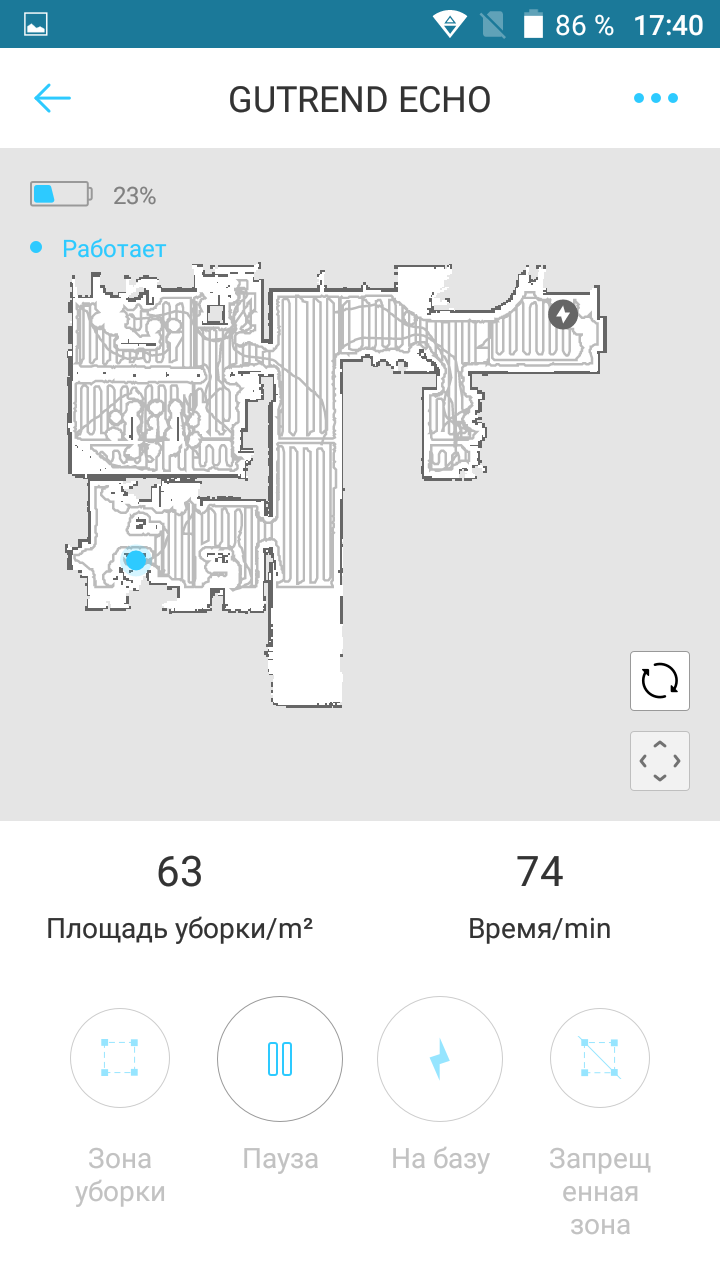
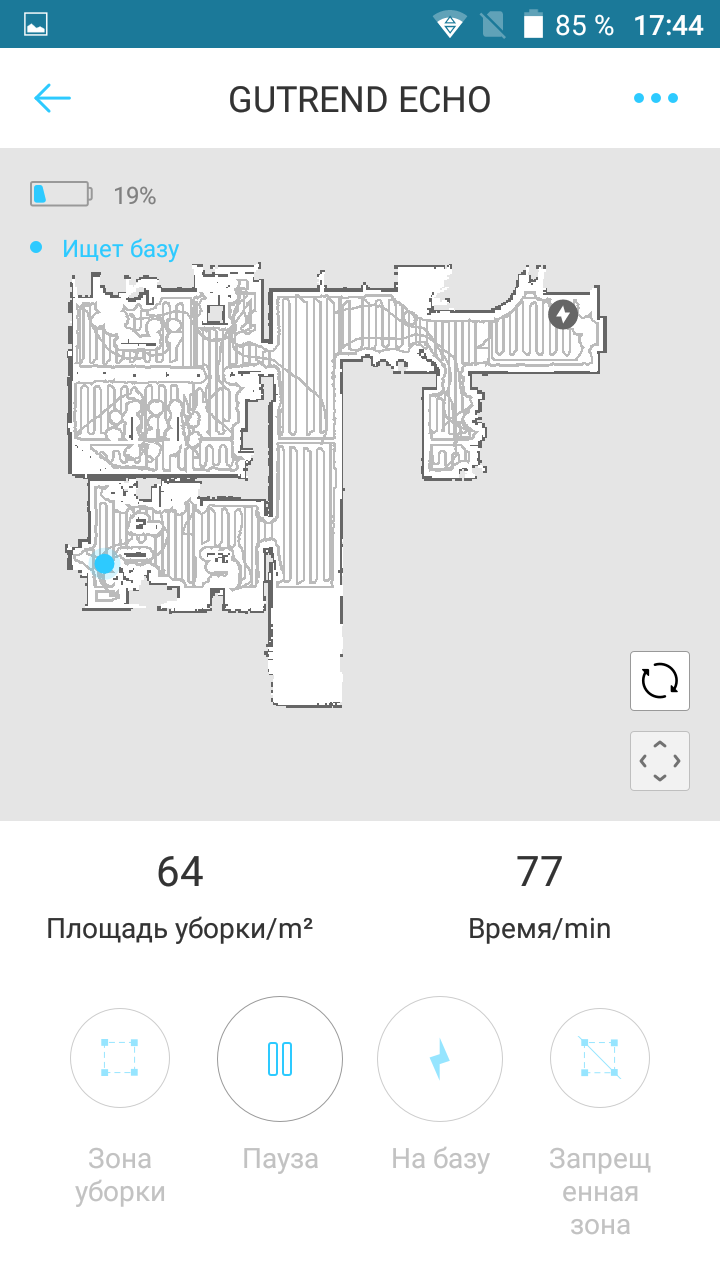
Построенная в приложении карта повернута на 90 градусов по часовой стрелке относительно приведенной выше схемы. Напомним, что после зарядки робот должен был вернуться к неубранному участку и закончить уборку всего помещения, но мы это не проверили. Участки с запретными зонами и с зонами для уборки можно расставлять на карте только после остановки уборки.
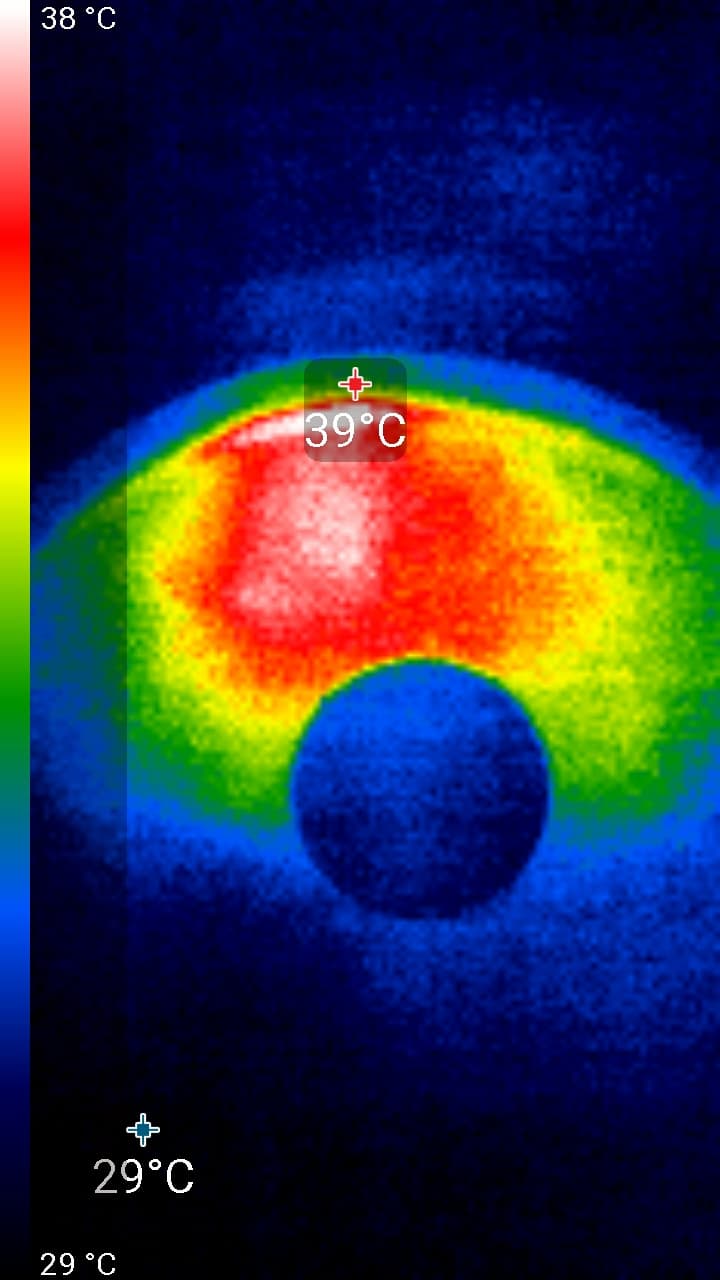
На восстановление заряда роботу требуется провести на базе 5 часов. Во время зарядки на базе от сети потребляется до почти 16,4 Вт. 0,4 Вт потребляет адаптер и база без робота, а с зарядившимся роботом потребление достигает 4,3 Вт, что весьма много. Также робот на базе или просто включенный заметно греется в передней части. Это, конечно, является недостатком. На термоснимке ниже изображен пылесос, припаркованный на базе (она вверху). По темной (то есть холодной) башенке можно определить место нагрева:
Уровень шума увеличивается при увеличении мощности всасывания:
| Мощность вентилятора | Уровень шума, дБА |
|---|---|
| Низкая | 56,0 |
| Средняя | 57,8 |
| Максимальная | 59,5 |
При работе на средней и максимальной мощности всасывания робот относительно громкий. Находиться в одной комнате с работающим роботом не очень комфортно, особенно при его работе на максимальной мощности. Однако характер издаваемого им шума не является очень неприятным. Для сравнения, уровень шума в этих условиях обычного (не самого тихого) пылесоса равен примерно 76,5 дБА.
Выводы
Робот-пылесос Gutrend Echo 520 убирает быстро и качественно. Это достигается за счет высокой эффективности сбора мусора с пола и продвинутой навигации, благодаря которой робот реже проезжает по уже убранным местам и не оставляет неубранные участки на доступной ему площади.
Достоинства
- Высокая эффективность уборки
- Продвинутая система ориентации и прокладка рационального маршрута уборки
- Специальный блок для совмещенной сухой уборки и влажной протирки
- Ограничение движения с помощью магнитной ленты и зон на карте
- Выбор зон на карте для целевой уборки
- Удобное крепление боковых щеточек
- Удобный пылесборник
- Регулировка мощности всасывания
- Управление и контроль с помощью мобильного приложения
- Уборка по расписанию
- Хорошая комплектация
- Полная русификация
Недостатки
- Относительно высокое потребление в режиме ожидания
В заключение предлагаем посмотреть наш видеообзор робота-пылесоса Gutrend Echo 520:
Наш видеообзор робота-пылесоса Gutrend Echo 520 можно также посмотреть на iXBT.video
Комментарии