

–ü–Ψ–Μ–Ϋ–Ψ―Ü–Β–Ϋ–Ϋ–Ψ–Β –Ψ–±―ä–Β–Κ―²–Η–≤–Ϋ–Ψ–Β ―²–Β―¹―²–Η―Ä–Ψ–≤–Α–Ϋ–Η–Β ―Ä–Ψ–±–Ψ―²–Ψ–≤-–Ω―΄–Μ–Β―¹–Ψ―¹–Ψ–≤ (–Η –≤ ―΅–Α―¹―²–Ϋ–Ψ―¹―²–Η βÄî –Ψ–Ω―Ä–Β–¥–Β–Μ–Β–Ϋ–Η–Β –Κ–Α―΅–Β―¹―²–≤–Α ―É–±–Ψ―Ä–Κ–Η) –Ψ―΅–Β–Ϋ―¨ –Ζ–Α―²―Ä―É–¥–Ϋ–Β–Ϋ–Ψ –≤–≤–Η–¥―É –Ϋ–Β–≤–Ψ–Ψ–±―Ä–Α–Ζ–Η–Φ–Ψ–≥–Ψ –Κ–Ψ–Μ–Η―΅–Β―¹―²–≤–Α –≤–Ψ–Ζ–Φ–Ψ–Ε–Ϋ―΄―Ö ―¹–Ψ―΅–Β―²–Α–Ϋ–Η–Ι –Κ–Ψ–Ϋ―³–Η–≥―É―Ä–Α―Ü–Η–Η –Ω–Ψ–Φ–Β―â–Β–Ϋ–Η―è –Η –Ψ–±―¹―²–Α–Ϋ–Ψ–≤–Κ–Η, ―²–Η–Ω–Ψ–≤ –Ω–Ψ–≤–Β―Ä―Ö–Ϋ–Ψ―¹―²–Η –Η –≤–Η–¥–Ψ–≤ –Φ―É―¹–Ψ―Ä–Α βÄî –Ω―΄–Μ―¨, –Ω–Β―¹–Ψ–Κ –Η –Κ―Ä―É–Ω–Ϋ―΄–Β ―΅–Α―¹―²–Η―Ü―΄, –≤–Ψ–Μ–Ψ―¹―΄, –Ϋ–Η―²–Κ–Η –Η ―à–Β―Ä―¹―²―¨ –Η ―². –Ω. –Η ―². –¥. –û–¥–Ϋ–Α–Κ–Ψ –Ψ–≥―Ä–Α–Ϋ–Η―΅–Η–≤–Α―²―¨―¹―è ―²–Ψ–Μ―¨–Κ–Ψ ―¹―É–±―ä–Β–Κ―²–Η–≤–Ϋ―΄–Φ–Η –≤–Ω–Β―΅–Α―²–Μ–Β–Ϋ–Η―è–Φ–Η ―²–Ψ–Ε–Β –Ϋ–Β –Ψ―΅–Β–Ϋ―¨ –Η–Ϋ―²–Β―Ä–Β―¹–Ϋ–Ψ. –£ –Η―²–Ψ–≥–Β –Φ―΄ ―Ä–Α–Ζ―Ä–Α–±–Ψ―²–Α–Μ–Η –Ϋ–Β–Κ–Ψ―²–Ψ―Ä―É―é –Κ–Ψ–Φ–Ω―Ä–Ψ–Φ–Η―¹―¹–Ϋ―É―é –Φ–Β―²–Ψ–¥–Η–Κ―É.
–Δ–Β―¹―²–Η―Ä–Ψ–≤–Α–Ϋ–Η–Β –Φ–Ψ–Ε–Ϋ–Ψ ―Ä–Α–Ζ–¥–Β–Μ–Η―²―¨ –Ϋ–Α –¥–≤–Β ―΅–Α―¹―²–Η: –Ψ–Ω–Η―¹–Α―²–Β–Μ―¨–Ϋ―É―é –Η ―¹–Ψ–±―¹―²–≤–Β–Ϋ–Ϋ–Ψ ―¹–Α–Φ–Η ―²–Β―¹―²―΄.
–û–Ω–Η―¹–Α―²–Β–Μ―¨–Ϋ–Α―è ―΅–Α―¹―²―¨ –Ζ–Α–Κ–Μ―é―΅–Α–Β―²―¹―è –≤ ―³–Ψ―²–Ψ–≥―Ä–Α―³–Η―Ä–Ψ–≤–Α–Ϋ–Η–Η, –Ψ–Ω–Η―¹–Α–Ϋ–Η–Η –≤–Ϋ–Β―à–Ϋ–Β–≥–Ψ –≤–Η–¥–Α, –Κ–Ψ–Φ–Ω–Μ–Β–Κ―²–Α―Ü–Η–Η, –Ψ―¹–Ψ–±–Β–Ϋ–Ϋ–Ψ―¹―²–Β–Ι –Κ–Ψ–Ϋ―¹―²―Ä―É–Κ―Ü–Η–Η –Η ―²–Ψ–Φ―É –Ω–Ψ–¥–Ψ–±–Ϋ―΄―Ö –≤–Β―â–Β–Ι, –Ψ–±―â–Η―Ö –¥–Μ―è –Μ―é–±–Ψ–≥–Ψ ―²–Β―¹―²–Α –Μ―é–±–Ψ–≥–Ψ ―É―¹―²―Ä–Ψ–Ι―¹―²–≤–Α, –Ω–Ψ―ç―²–Ψ–Φ―É –Ω–Ψ–¥―Ä–Ψ–±–Ϋ–Ψ ―Ä–Α―¹–Ω–Η―¹―΄–≤–Α―²―¨ ―ç―²–Ψ―² ―ç―²–Α–Ω –Ψ―¹–Ψ–±–Ψ–≥–Ψ ―¹–Φ―΄―¹–Μ–Α –Ϋ–Β―². –£ –Ω–Β―Ä–≤―É―é ―΅–Α―¹―²―¨ –≤―Ö–Ψ–¥–Η―² ―²–Α–Κ–Ε–Β –Ψ–Ω―Ä–Β–¥–Β–Μ–Β–Ϋ–Η–Β –Ϋ–Α–Η–±–Ψ–Μ–Β–Β –≤–Α–Ε–Ϋ―΄―Ö –≥–Β–Ψ–Φ–Β―²―Ä–Η―΅–Β―¹–Κ–Η―Ö –Ω–Α―Ä–Α–Φ–Β―²―Ä–Ψ–≤ ―²–Β―¹―²–Η―Ä―É–Β–Φ–Ψ–≥–Ψ ―É―¹―²―Ä–Ψ–Ι―¹―²–≤–Α, ―²–Α–Κ–Η―Ö –Κ–Α–Κ –≥–Α–±–Α―Ä–Η―²―΄ ―Ä–Ψ–±–Ψ―²–Α-–Ω―΄–Μ–Β―¹–Ψ―¹–Α, –¥–Μ–Η–Ϋ–Α –Κ–Α–±–Β–Μ–Β–Ι –Η –¥―Ä. –î–Μ―è ―ç―²–Ψ–≥–Ψ –Ω―Ä–Η–Φ–Β–Ϋ―è―é―²―¹―è ―Ä―É–Μ–Β―²–Κ–Α, –Μ–Η–Ϋ–Β–Ι–Κ–Η –Η ―à―²–Α–Ϋ–≥–Β–Ϋ―Ü–Η―Ä–Κ―É–Μ―¨.

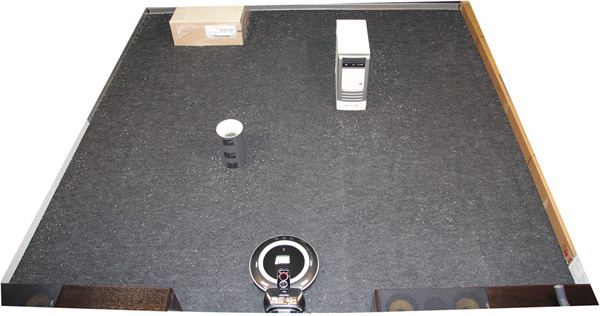
–î–Μ―è ―²–Β―¹―²–Η―Ä–Ψ–≤–Α–Ϋ–Η―è ―Ä–Ψ–±–Ψ―²–Ψ–≤-–Ω―΄–Μ–Β―¹–Ψ―¹–Ψ–≤ –≤ –Ψ―³–Η―¹–Ϋ–Ψ–Φ –Ω–Ψ–Φ–Β―â–Β–Ϋ–Η–Η –Ω–Ψ–¥―Ä―É―΅–Ϋ―΄–Φ–Η ―¹―Ä–Β–¥―¹―²–≤–Α–Φ–Η (–Κ–Ψ―Ä–Ψ–±–Κ–Η, –Ω–Β―Ä–Β–≤–Β―Ä–Ϋ―É―²―΄–Ι ―¹―²–Ψ–Μ, –Κ–Ψ–Μ–Ψ–Ϋ–Κ–Η –Ϋ–Α –±–Ψ–Κ―É –Η ―². –¥.) –Ψ–≥–Ψ―Ä–Α–Ε–Η–≤–Α–Β―²―¹―è –Ω―Ä–Ψ―¹―²―Ä–Α–Ϋ―¹―²–≤–Ψ 3×3¬†–Φ. –ù–Α–Ω–Ψ–Μ―¨–Ϋ–Ψ–Β –Ω–Ψ–Κ―Ä―΄―²–Η–Β ―ç―²–Ψ–Ι –Α―Ä–Β–Ϋ―΄ βÄî –Κ–Ψ–Φ–Φ–Β―Ä―΅–Β―¹–Κ–Η–Ι –Κ–Ψ–≤―Ä–Ψ–Μ–Η–Ϋ ―΅–Β―Ä–Ϋ–Ψ–≥–Ψ ―Ü–≤–Β―²–Α ―¹ –Ω–Μ–Ψ―²–Ϋ―΄–Φ –Ω–Β―²–Μ–Β–Ψ–±―Ä–Α–Ζ–Ϋ―΄–Φ –≤–Ψ―Ä―¹–Ψ–Φ, ―΅―²–Ψ ―è–≤–Μ―è–Β―²―¹―è –Ϋ–Β–Κ–Ψ―²–Ψ―Ä―΄–Φ –Ω―Ä–Ψ–Φ–Β–Ε―É―²–Ψ―΅–Ϋ―΄–Φ –≤–Α―Ä–Η–Α–Ϋ―²–Ψ–Φ –Φ–Β–Ε–¥―É –¥–Μ–Η–Ϋ–Ϋ–Ψ–≤–Ψ―Ä―¹–Ϋ―΄–Φ –Κ–Ψ–≤―Ä–Ψ–Φ –Η –≥–Μ–Α–¥–Κ–Ψ–Ι –Ω–Ψ–≤–Β―Ä―Ö–Ϋ–Ψ―¹―²―¨―é. –‰–Φ–Η―²–Α―Ü–Η–Β–Ι –≤–Ψ–Ζ–Φ–Ψ–Ε–Ϋ―΄―Ö –Ω―Ä–Β–Ω―è―²―¹―²–≤–Η–Ι ―¹–Μ―É–Ε–Α―² –Κ–Ψ–Φ–Ω―¨―é―²–Β―Ä–Ϋ―΄–Ι –Κ–Ψ―Ä–Ω―É―¹ ―²–Η–Ω–Η―΅–Ϋ―΄―Ö ―Ä–Α–Ζ–Φ–Β―Ä–Ψ–≤, ―Ü–Η–Μ–Η–Ϋ–¥―Ä –Η ―²–Β―¹–Ϋ―΄–Ι –Ζ–Α–≥–Ψ–Ϋ―΅–Η–Κ –≥–Μ―É–±–Η–Ϋ–Ψ–Ι 60¬†―¹–Φ –Η ―à–Η―Ä–Η–Ϋ–Ψ–Ι –Ϋ–Α 5¬†―¹–Φ –±–Ψ–Μ―¨―à–Β –Κ–Ψ―Ä–Ω―É―¹–Α –Ω―΄–Μ–Β―¹–Ψ―¹–Α –≤ ―¹–Α–Φ–Ψ–Φ ―à–Η―Ä–Ψ–Κ–Ψ–Φ –Φ–Β―¹―²–Β. –Π–Η–Μ–Η–Ϋ–¥―Ä ―¹–Μ―É–Ε–Η―² –Ϋ–Β–Κ–Ψ―²–Ψ―Ä–Ψ–Ι –Η–Φ–Η―²–Α―Ü–Η–Β–Ι –Ϋ–Β–±–Ψ–Μ―¨―à–Ψ–≥–Ψ –Ω―Ä–Β–Ω―è―²―¹―²–≤–Η―è ―²–Η–Ω–Α –Ϋ–Ψ–Ε–Κ–Η ―¹―²–Ψ–Μ–Α –Η–Μ–Η –¥–Η–≤–Α–Ϋ–Α, –≤–Ψ–Κ―Ä―É–≥ –Κ–Ψ―²–Ψ―Ä–Ψ–Ι –Ϋ―É–Ε–Ϋ–Ψ ―É–±―Ä–Α―²―¨ –Φ―É―¹–Ψ―Ä.
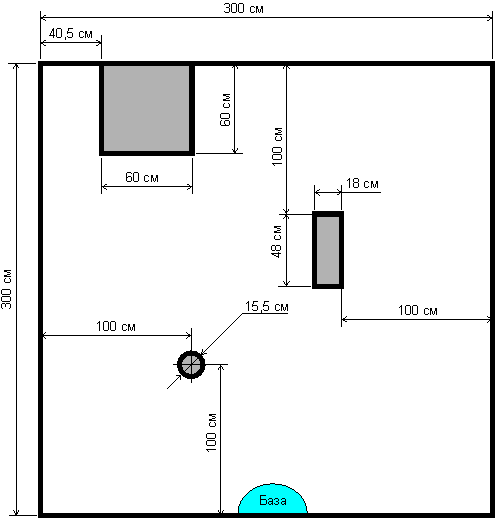
–€―΄ –Ϋ–Β ―¹―²–Α–Μ–Η ―¹–Ψ–Ζ–¥–Α–≤–Α―²―¨ –Ω―Ä–Β–Ω―è―²―¹―²–≤–Η―è, –Η–Φ–Η―²–Η―Ä―É―é―â–Η–Β –Ω–Ψ―Ä–Ψ–≥–Η, ―²–Α–Κ –Κ–Α–Κ –Ϋ–Β ―¹―É―â–Β―¹―²–≤―É–Β―² ―²–Α–Κ–Η―Ö –Ω–Ψ–Ϋ―è―²–Η–Ι, –Κ–Α–Κ ―¹―²–Α–Ϋ–¥–Α―Ä―²–Ϋ–Α―è –≤―΄―¹–Ψ―²–Α –Ω–Ψ―Ä–Ψ–≥–Α –Η ―³–Ψ―Ä–Φ–Α –Β–≥–Ψ –Ω―Ä–Ψ―³–Η–Μ―è. –ü―Ä–Η ―ç―²–Ψ–Φ –Η―¹–Ω–Ψ–Μ―¨–Ζ–Ψ–≤–Α–Ϋ–Η–Β –Ω–Ψ―Ä–Ψ–≥–Α ―¹ ―Ä–Β–≥―É–Μ–Η―Ä―É–Β–Φ–Ψ–Ι –≤―΄―¹–Ψ―²–Ψ–Ι –Η–Μ–Η –Ϋ–Α–±–Ψ―Ä–Α ―Ä–Α–Ζ–Μ–Η―΅–Ϋ―΄―Ö –Ω–Ψ –≤―΄―¹–Ψ―²–Β –Ω–Ψ―Ä–Ψ–≥–Ψ–≤ ―¹ ―Ü–Β–Μ―¨―é, –Ϋ–Α–Ω―Ä–Η–Φ–Β―Ä, –Ψ–Ω―Ä–Β–¥–Β–Μ–Β–Ϋ–Η―è –Φ–Α–Κ―¹–Η–Φ–Α–Μ―¨–Ϋ–Ψ–Ι –≤―΄―¹–Ψ―²―΄ –Ω–Ψ―Ä–Ψ–≥–Α, –Κ–Ψ―²–Ψ―Ä―É―é –Φ–Ψ–Ε–Β―² –Ω―Ä–Β–Ψ–¥–Ψ–Μ–Β―²―¨ –Ω―΄–Μ–Β―¹–Ψ―¹, –Ω―Ä–Η–≤–Β–Μ–Ψ –±―΄ –Κ –Ϋ–Β–Ψ–Ω―Ä–Α–≤–¥–Α–Ϋ–Ϋ–Ψ–Φ―É ―É―¹–Μ–Ψ–Ε–Ϋ–Β–Ϋ–Η―é ―²–Β―¹―²–Ψ–≤. –ü―Ä–Η–Φ–Β―Ä–Ϋ–Ψ –Ω–Ψ ―Ü–Β–Ϋ―²―Ä―É –Ψ–¥–Ϋ–Ψ–Ι –Η–Ζ ―¹―²–Β–Ϋ –Ω–Ψ–Φ–Β―â–Α–Β―²―¹―è –Ζ–Α―Ä―è–¥–Ϋ–Α―è –±–Α–Ζ–Α ―¹ –Ω―΄–Μ–Β―¹–Ψ―¹–Ψ–Φ –Ϋ–Α –Ϋ–Β–Ι –Η–Μ–Η, –Β―¹–Μ–Η –±–Α–Ζ―΄ –Ϋ–Β―², ―¹–Α–Φ –Ω―΄–Μ–Β―¹–Ψ―¹. –ù–Α ―¹―Ö–Β–Φ–Β –Ϋ–Η–Ε–Β ―É–Κ–Α–Ζ–Α–Ϋ―΄ –≤―¹–Β –≥–Β–Ψ–Φ–Β―²―Ä–Η―΅–Β―¹–Κ–Η–Β –Ω–Α―Ä–Α–Φ–Β―²―Ä―΄. –™―Ä–Α–Ϋ–Η―Ü―΄ –Ω―Ä–Β–¥–Φ–Β―²–Ψ–≤ –Η –Α―Ä–Β–Ϋ―΄ –Ψ–±–Ψ–Ζ–Ϋ–Α―΅–Β–Ϋ―΄ ―²–Ψ–Μ―¹―²―΄–Φ–Η ―΅–Β―Ä–Ϋ―΄–Φ–Η –Μ–Η–Ϋ–Η―è–Φ–Η, ―¹–Β―Ä―΄–Φ ―Ü–≤–Β―²–Ψ–Φ –Ζ–Α–Κ―Ä–Α―à–Β–Ϋ―΄ –Ω–Μ–Ψ―â–Α–¥–Η, –Ϋ–Β–¥–Ψ―¹―²―É–Ω–Ϋ―΄–Β –¥–Μ―è –Ω―΄–Μ–Β―¹–Ψ―¹–Α.
–£ –Κ–Α―΅–Β―¹―²–≤–Β –Η–Φ–Η―²–Α―Ü–Η–Η –Φ―É―¹–Ψ―Ä–Α –Φ―΄ –≤―΄–±―Ä–Α–Μ–Η –¥–Μ–Η–Ϋ–Ϋ–Ψ–Ζ–Β―Ä–Ϋ―΄–Ι ―à–Μ–Η―³–Ψ–≤–Α–Ϋ–Ϋ―΄–Ι ―Ä–Η―¹.

–≠―²–Ψ –Ϋ–Β ―¹–Α–Φ―΄–Ι ―²–Η–Ω–Η―΅–Ϋ―΄–Ι –≤–Η–¥ –Φ―É―¹–Ψ―Ä–Α, –Ψ–¥–Ϋ–Α–Κ–Ψ –Ψ―²–Ϋ–Ψ―¹–Η―²–Β–Μ―¨–Ϋ–Ψ –Κ―Ä―É–Ω–Ϋ―΄–Β –Η –Ζ–Α–Φ–Β―²–Ϋ―΄–Β –Ϋ–Α ―΅–Β―Ä–Ϋ–Ψ–Φ ―³–Ψ–Ϋ–Β –Ζ–Β―Ä–Ϋ–Α –Ω–Ψ–Ζ–≤–Ψ–Μ―è―é―² –Μ–Β–≥–Κ–Ψ –Κ–Ψ–Ϋ―²―Ä–Ψ–Μ–Η―Ä–Ψ–≤–Α―²―¨ –Κ–Α―΅–Β―¹―²–≤–Ψ –Η –Ψ―¹–Ψ–±–Β–Ϋ–Ϋ–Ψ―¹―²–Η ―É–±–Ψ―Ä–Κ–Η. –ö ―²–Ψ–Φ―É –Ε–Β –Ψ―΅–Η―¹―²–Κ–Α ―²–Β―Ä―Ä–Η―²–Ψ―Ä–Η–Η –Ψ―² ―Ä–Η―¹–Ψ–≤―΄―Ö –Ζ–Β―Ä–Β–Ϋ –Φ–Β–Ε–¥―É ―²–Β―¹―²–Α–Φ–Η –Ζ–Α–Ϋ–Η–Φ–Α–Β―² –Ψ―²–Ϋ–Ψ―¹–Η―²–Β–Μ―¨–Ϋ–Ψ –Φ–Α–Μ–Ψ –≤―Ä–Β–Φ–Β–Ϋ–Η, ―΅―²–Ψ –±―΄–Μ–Ψ –±―΄ ―¹–Ψ–≤―¹–Β–Φ –Ϋ–Β ―²–Α–Κ –≤ ―¹–Μ―É―΅–Α–Β –Φ―É―¹–Ψ―Ä–Α ―¹ –Φ–Β–Μ–Κ–Η–Φ–Η ―΅–Α―¹―²–Η―Ü–Α–Φ–Η. –ö –¥–Ψ―¹―²–Ψ–Η–Ϋ―¹―²–≤–Α–Φ ―Ä–Η―¹–Α –Ψ―²–Ϋ–Ψ―¹–Η―²―¹―è ―²–Ψ, ―΅―²–Ψ –Ψ–Ϋ –Ω―Ä–Α–Κ―²–Η―΅–Β―¹–Κ–Η –Ϋ–Β –Ω–Ψ–≥–Μ–Ψ―â–Α–Β―² –≤–Μ–Α–≥―É –Η–Ζ –≤–Ψ–Ζ–¥―É―Ö–Α, –Ϋ–Β ―Ä–Α―¹―²–≤–Ψ―Ä―è–Β―²―¹―è –≤ –≤–Ψ–¥–Β, –Ϋ–Β ―¹–Μ–Β–Ε–Η–≤–Α–Β―²―¹―è, –Η –Β–≥–Ψ –≤―¹–Β–≥–¥–Α –±–Β–Ζ –Ω―Ä–Ψ–±–Μ–Β–Φ –Φ–Ψ–Ε–Ϋ–Ψ –Κ―É–Ω–Η―²―¨ –Ω―Ä–Α–Κ―²–Η―΅–Β―¹–Κ–Η –≤ –Μ―é–±–Ψ–Φ –Ω―Ä–Ψ–¥―É–Κ―²–Ψ–≤–Ψ–Φ –Φ–Α–≥–Α–Ζ–Η–Ϋ–Β. –£―¹–Β ―ç―²–Η ―¹–≤–Ψ–Ι―¹―²–≤–Α –≤―΄–±―Ä–Α–Ϋ–Ϋ–Ψ–Ι –Η–Φ–Η―²–Α―Ü–Η–Η –Φ―É―¹–Ψ―Ä–Α –Ω–Ψ–Ζ–≤–Ψ–Μ―è―é―² –Φ–Α–Κ―¹–Η–Φ–Η–Ζ–Η―Ä–Ψ–≤–Α―²―¨ –≤–Ψ―¹–Ω―Ä–Ψ–Η–Ζ–≤–Ψ–¥–Η–Φ–Ψ―¹―²―¨ ―Ä–Β–Ζ―É–Μ―¨―²–Α―²–Ψ–≤ –Η―¹–Ω―΄―²–Α–Ϋ–Η–Ι βÄî –Ω―É―¹―²―¨ –Η –≤ ―É―â–Β―Ä–± –Ϋ–Β–Κ–Ψ―²–Ψ―Ä–Ψ–Ι –Η―Ö –Ϋ–Α―²―É―Ä–Α–Μ―¨–Ϋ–Ψ―¹―²–Η.
–ü–Β―Ä–Β–¥ –Κ–Α–Ε–¥―΄–Φ ―²–Β―¹―²–Ψ–Φ ―Ä–Η―¹ –≤ –Κ–Ψ–Μ–Η―΅–Β―¹―²–≤–Β 100¬†–≥ –≤―Ä―É―΅–Ϋ―É―é –Η –Ω–Ψ –≤–Ψ–Ζ–Φ–Ψ–Ε–Ϋ–Ψ―¹―²–Η ―Ä–Α–≤–Ϋ–Ψ–Φ–Β―Ä–Ϋ–Ψ ―Ä–Α―¹–Ω―Ä–Β–¥–Β–Μ―è–Β―²―¹―è –Ω–Ψ –≤―¹–Β–Ι –¥–Ψ―¹―²―É–Ω–Ϋ–Ψ–Ι –Ω―΄–Μ–Β―¹–Ψ―¹―É –Ω–Μ–Ψ―â–Α–¥–Η. –ü–Ψ―¹–Μ–Β ―É–±–Ψ―Ä–Κ–Η –Κ–Ψ–Μ–Η―΅–Β―¹―²–≤–Ψ ―Ä–Η―¹–Α –≤ –Ω―΄–Μ–Β―¹–±–Ψ―Ä–Ϋ–Η–Κ–Β –Ψ–Ω―Ä–Β–¥–Β–Μ―è–Β―²―¹―è –Κ–Α–Κ –Ω–Ψ ―Ä–Α–Ζ–Ϋ–Η―Ü–Β –Φ–Α―¹―¹ –Ζ–Α–Ω–Ψ–Μ–Ϋ–Β–Ϋ–Ϋ–Ψ–≥–Ψ –Η –Ω―É―¹―²–Ψ–≥–Ψ –Ω―΄–Μ–Β―¹–±–Ψ―Ä–Ϋ–Η–Κ–Α, ―²–Α–Κ –Η –≤–Ζ–≤–Β―à–Η–≤–Α–Ϋ–Η–Β–Φ ―Ä–Η―¹–Α, –≤―΄―¹―΄–Ω–Α–Ϋ–Ϋ–Ψ–≥–Ψ –Η–Ζ –Ω―΄–Μ–Β―¹–±–Ψ―Ä–Ϋ–Η–Κ–Α. –£–Ψ –≤―²–Ψ―Ä–Ψ–Φ ―¹–Μ―É―΅–Α–Β ―²–Α–Κ–Ε–Β –Κ–Ψ–Ϋ―²―Ä–Ψ–Μ–Η―Ä―É–Β―²―¹―è –Κ–Ψ–Μ–Η―΅–Β―¹―²–≤–Ψ –Ω–Ψ―¹―²–Ψ―Ä–Ψ–Ϋ–Ϋ–Β–≥–Ψ –Φ―É―¹–Ψ―Ä–Α. –€–Α―¹―¹–Α ―¹–Ψ–±―Ä–Α–Ϋ–Ϋ–Ψ–≥–Ψ ―Ä–Η―¹–Α –≤ –≥―Ä–Α–Φ–Φ–Α―Ö ―¹–Ψ–Ψ―²–≤–Β―²―¹―²–≤―É–Β―² –Ω―Ä–Ψ―Ü–Β–Ϋ―²―É ―É–±–Ψ―Ä–Κ–Η. –£ –Η–¥–Β–Α–Μ―¨–Ϋ–Ψ–Φ ―¹–Μ―É―΅–Α–Β –Ω―΄–Μ–Β―¹–Ψ―¹ –¥–Ψ–Μ–Ε–Β–Ϋ ―¹–Ψ–±―Ä–Α―²―¨ 100¬†–≥, –Η–Μ–Η 100%. –ö–Ψ–Ϋ–Β―΅–Ϋ–Ψ, ―ç―²–Ψ―² ―²–Β―¹―² –Ω–Ψ–Κ–Α–Ζ―΄–≤–Α–Β―² ―²–Ψ–Μ―¨–Κ–Ψ ―²–Ψ, –Κ–Α–Κ –Ω―΄–Μ–Β―¹–Ψ―¹ ―¹–Ω―Ä–Α–≤–Μ―è–Β―²―¹―è ―¹ ―É–±–Ψ―Ä–Κ–Ψ–Ι –¥–Α–Ϋ–Ϋ–Ψ–≥–Ψ –≤–Η–¥–Α –Φ―É―¹–Ψ―Ä–Α –Η –≤ –¥–Α–Ϋ–Ϋ―΄―Ö ―É―¹–Μ–Ψ–≤–Η―è―Ö, –Ω–Ψ―ç―²–Ψ–Φ―É –Κ –Ω–Ψ–Μ―É―΅–Β–Ϋ–Ϋ―΄–Φ ―Ä–Β–Ζ―É–Μ―¨―²–Α―²–Α–Φ –Ϋ―É–Ε–Ϋ–Ψ –Ψ―²–Ϋ–Ψ―¹–Η―²―¨―¹―è ―¹ –Ϋ–Β–Κ–Ψ―²–Ψ―Ä–Ψ–Ι –Ψ―¹―²–Ψ―Ä–Ψ–Ε–Ϋ–Ψ―¹―²―¨―é.
–î–Μ―è –≤–Ζ–≤–Β―à–Η–≤–Α–Ϋ–Η―è ―Ä–Η―¹–Α –Ω―Ä–Η–Φ–Β–Ϋ―è―é―²―¹―è ―ç–Μ–Β–Κ―²―Ä–Ψ–Ϋ–Ϋ―΄–Β –≤–Β―¹―΄ DWP-1001, –Ω–Ψ–Ζ–≤–Ψ–Μ―è―é―â–Η–Β –≤–Ζ–≤–Β―à–Η–≤–Α―²―¨ –¥–Ψ 1¬†–Κ–≥ –Η –Η–Φ–Β―é―â–Η–Β –¥–Η―¹–Κ―Ä–Β―²–Ϋ–Ψ―¹―²―¨ –Ψ―²―¹―΅–Β―²–Α 0,1¬†–≥ –Η –Ω―Ä–Η–Φ–Β―Ä–Ϋ–Ψ ―²–Α–Κ―É―é –Ε–Β –Ω–Ψ–≥―Ä–Β―à–Ϋ–Ψ―¹―²―¨ –≤–Ζ–≤–Β―à–Η–≤–Α–Ϋ–Η―è.

–Δ–Β―¹―²–Η―Ä–Ψ–≤–Α–Ϋ–Η–Β –Κ–Ψ―Ä–Ψ―²–Κ–Η―Ö ―Ü–Η–Κ–Μ–Ψ–≤ ―É–±–Ψ―Ä–Κ–Η –Ω―Ä–Ψ–Η–Ζ–≤–Ψ–¥–Η―²―¹―è –Ϋ–Β―¹–Κ–Ψ–Μ―¨–Κ–Ψ ―Ä–Α–Ζ, –¥–Μ–Η–Ϋ–Ϋ―΄–Β ―Ü–Η–Κ–Μ―΄ (–¥–Ψ –Η―¹―²–Ψ―â–Β–Ϋ–Η―è –Ζ–Α―Ä―è–¥–Α –Α–Κ–Κ―É–Φ―É–Μ―è―²–Ψ―Ä–Α) ―²–Β―¹―²–Η―Ä―É―é―²―¹―è –Ψ–¥–Η–Ϋ-–¥–≤–Α ―Ä–Α–Ζ–Α. –ï―¹–Μ–Η ―É –Ω―΄–Μ–Β―¹–Ψ―¹–Α –Ϋ–Β―² –Κ–Ψ―Ä–Ψ―²–Κ–Η―Ö ―Ü–Η–Κ–Μ–Ψ–≤ ―É–±–Ψ―Ä–Κ–Η –Η–Μ–Η –Φ–Η–Ϋ–Η–Φ–Α–Μ―¨–Ϋ–Α―è –¥–Μ–Η―²–Β–Μ―¨–Ϋ–Ψ―¹―²―¨ ―Ü–Η–Κ–Μ–Α –Ω―Ä–Β–≤―΄―à–Α–Β―² 10¬†–Φ–Η–Ϋ, ―²–Ψ –¥–Μ―è –Η–Φ–Η―²–Α―Ü–Η–Η –Κ–Ψ―Ä–Ψ―²–Κ–Ψ–≥–Ψ ―Ü–Η–Κ–Μ–Α ―É–±–Ψ―Ä–Κ–Α –Ω―Ä–Η–Ϋ―É–¥–Η―²–Β–Μ―¨–Ϋ–Ψ –Ω―Ä–Β―Ä―΄–≤–Α–Β―²―¹―è ―΅–Β―Ä–Β–Ζ 10 –Φ–Η–Ϋ―É―². –ù–Α–Ψ–±–Ψ―Ä–Ψ―², –Β―¹–Μ–Η ―É –Ω―΄–Μ–Β―¹–Ψ―¹–Α –Ϋ–Β―² ―Ü–Η–Κ–Μ–Α ―É–±–Ψ―Ä–Κ–Η –¥–Ψ –Η―¹―²–Ψ―â–Β–Ϋ–Η―è –Ζ–Α―Ä―è–¥–Α –Α–Κ–Κ―É–Φ―É–Μ―è―²–Ψ―Ä–Α, ―²–Ψ –¥–Μ―è –Η–Φ–Η―²–Α―Ü–Η–Η –¥–Μ–Η–Ϋ–Ϋ–Ψ–≥–Ψ ―Ü–Η–Κ–Μ–Α –Ω―Ä–Ψ–Η–Ζ–≤–Ψ–¥–Η―²―¹―è –Ω–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ―΄–Ι –Ζ–Α–Ω―É―¹–Κ –Κ–Ψ―Ä–Ψ―²–Κ–Η―Ö ―Ü–Η–Κ–Μ–Ψ–≤ ―É–±–Ψ―Ä–Κ–Η. –£ –Κ–Α―΅–Β―¹―²–≤–Β ―Ä–Β–Ζ―É–Μ―¨―²–Α―²–Ψ–≤ –Ω―Ä–Η–≤–Ψ–¥–Η―²―¹―è ―²–Α–±–Μ–Η―Ü–Α ―¹ ―É–Κ–Α–Ζ–Α–Ϋ–Η–Β–Φ ―Ä–Β–Ε–Η–Φ–Ψ–≤, –Ω―Ä–Ψ―Ü–Β–Ϋ―²–Α ―¹–Ψ–±―Ä–Α–Ϋ–Ϋ–Ψ–≥–Ψ –Φ―É―¹–Ψ―Ä–Α –Η –Ζ–Α―²―Ä–Α―΅–Β–Ϋ–Ϋ–Ψ–≥–Ψ –≤―Ä–Β–Φ–Β–Ϋ–Η –Ψ―² ―¹―²–Α―Ä―²–Α ―Ü–Η–Κ–Μ–Α –¥–Ψ –≤–Ψ–Ζ–≤―Ä–Α―²–Α –Ϋ–Α –±–Α–Ζ―É (–Η–Μ–Η –¥–Ψ –Ψ–Κ–Ψ–Ϋ―΅–Α–Ϋ–Η―è ―Ü–Η–Κ–Μ–Α, –Β―¹–Μ–Η –±–Α–Ζ―΄ –Ϋ–Β―²). –ü–Β―Ä–Β–¥ –Ϋ–Α―΅–Α–Μ–Ψ–Φ –Κ–Α–Ε–¥–Ψ–≥–Ψ ―Ü–Η–Κ–Μ–Α –Ω―Ä–Ψ–≤–Ψ–¥–Η―²―¹―è ―³–Ψ―²–Ψ–≥―Ä–Α―³–Η―Ä–Ψ–≤–Α–Ϋ–Η–Β ―É–±–Η―Ä–Α–Β–Φ–Ψ–Ι –Ω–Ψ–≤–Β―Ä―Ö–Ϋ–Ψ―¹―²–Η ―¹ ―Ä–Α―¹–Ω―Ä–Β–¥–Β–Μ–Β–Ϋ–Ϋ―΄–Φ –Ϋ–Α –Ϋ–Β–Ι –Η–Φ–Η―²–Α―²–Ψ―Ä–Ψ–Φ –Φ―É―¹–Ψ―Ä–Α, ―²–Α–Κ–Ε–Β ―³–Ψ―²–Ψ―¹―ä–Β–Φ–Κ–Α –Ω―Ä–Ψ–≤–Ψ–¥–Η―²―¹―è –Η –Ω–Ψ –Ψ–Κ–Ψ–Ϋ―΅–Α–Ϋ–Η–Η ―Ü–Η–Κ–Μ–Α, ―΅―²–Ψ –Ω–Ψ–Ζ–≤–Ψ–Μ―è–Β―² –Α–Ϋ–Α–Μ–Η–Ζ–Η―Ä–Ψ–≤–Α―²―¨ –Ψ―¹–Ψ–±–Β–Ϋ–Ϋ–Ψ―¹―²–Η ―É–±–Ψ―Ä–Κ–Η. –ö―Ä–Ψ–Φ–Β ―²–Ψ–≥–Ψ, –Ω―Ä–Ψ–≤–Ψ–¥–Η―²―¹―è –≤–Η–¥–Β–Ψ―¹―ä–Β–Φ–Κ–Α ―΅–Α―¹―²–Η –Η–Μ–Η –≤―¹–Β―Ö –Κ–Ψ―Ä–Ψ―²–Κ–Η―Ö ―Ü–Η–Κ–Μ–Ψ–≤ ―É–±–Ψ―Ä–Κ–Η, –Κ–Α–Κ –≤ ―Ä–Β–Ε–Η–Φ–Β –Ψ–±―â–Β–≥–Ψ –Ω–Μ–Α–Ϋ–Α, ―²–Α–Κ –Η –≤ ―¹–Μ–Β–¥―è―â–Β–Φ ―Ä–Β–Ε–Η–Φ–Β.
–î–Ψ–Ω–Ψ–Μ–Ϋ–Η―²–Β–Μ―¨–Ϋ–Ψ –Ω―Ä–Ψ–≤–Ψ–¥–Η―²―¹―è ―²–Β―¹―²–Η―Ä–Ψ–≤–Α–Ϋ–Η–Β ―Ä–Α–±–Ψ―²―΄ ―¹–Ω–Β―Ü–Η–Α–Μ―¨–Ϋ―΄―Ö ―Ä–Β–Ε–Η–Φ–Ψ–≤, ―²–Η–Ω–Α ―É–±–Ψ―Ä–Κ–Η –≤ –Ζ–Α–¥–Α–Ϋ–Ϋ–Ψ–Φ –Φ–Β―¹―²–Β, –Α ―²–Α–Κ–Ε–Β ―²–Β―¹―²–Η―Ä–Ψ–≤–Α–Ϋ–Η–Β ―É―¹―²―Ä–Ψ–Ι―¹―²–≤ ―²–Η–Ω–Α –Φ–Α―è–Κ –Η/–Η–Μ–Η –≤–Η―Ä―²―É–Α–Μ―¨–Ϋ–Α―è ―¹―²–Β–Ϋ–Α. –î–Α–Ϋ–Ϋ―΄–Β –≤–Η–¥―΄ ―²–Β―¹―²–Η―Ä–Ψ–≤–Α–Ϋ–Η―è –Ω―Ä–Ψ–≤–Ψ–¥―è―²―¹―è –Ϋ–Α –Φ–Ψ–¥–Η―³–Η―Ü–Η―Ä–Ψ–≤–Α–Ϋ–Ϋ–Ψ–Φ –Η–Μ–Η –Ω–Ψ–Μ–Ϋ–Ψ―¹―²―¨―é –Ψ―¹–≤–Ψ–±–Ψ–Ε–¥–Β–Ϋ–Ϋ–Ψ–Φ –Ψ―² –Ω―Ä–Β–Ω―è―²―¹―²–≤–Η–Ι ―²–Β―¹―²–Ψ–≤–Ψ–Φ –Ω―Ä–Ψ―¹―²―Ä–Α–Ϋ―¹―²–≤–Β.
–Θ―Ä–Ψ–≤–Β–Ϋ―¨ ―à―É–Φ–Α (–≤–Β―Ä–Ϋ–Β–Β, ―É―Ä–Ψ–≤–Β–Ϋ―¨ –Ζ–≤―É–Κ–Ψ–≤–Ψ–≥–Ψ –¥–Α–≤–Μ–Β–Ϋ–Η―è) –Η–Ζ–Φ–Β―Ä―è–Β―²―¹―è ―¹ –Ω–Ψ–Φ–Ψ―â―¨―é ―à―É–Φ–Ψ–Φ–Β―Ä–Α –û–Κ―²–Α–≤–Α-110–ê-–≠–Κ–Ψ.

–€–Η–Κ―Ä–Ψ―³–Ψ–Ϋ ―à―É–Φ–Ψ–Φ–Β―Ä–Α ―Ä–Α―¹–Ω–Ψ–Μ–Α–≥–Α–Β―²―¹―è –Ϋ–Α ―Ä–Α―¹―¹―²–Ψ―è–Ϋ–Η–Η –Ω―Ä–Η–Φ–Β―Ä–Ϋ–Ψ 1,2¬†–Φ –Ψ―² ―É―Ä–Ψ–≤–Ϋ―è –Ω–Ψ–Μ–Α, ―΅―²–Ψ –Ω―Ä–Η–Φ–Β―Ä–Ϋ–Ψ ―¹–Ψ–Ψ―²–≤–Β―²―¹―²–≤―É–Β―² –≤―΄―¹–Ψ―²–Β ―É―Ö–Α ―¹–Η–¥―è―â–Β–≥–Ψ –Ϋ–Α ―¹―²―É–Μ–Β ―΅–Β–Μ–Ψ–≤–Β–Κ–Α. –‰–Ζ–Φ–Β―Ä–Β–Ϋ–Η―è –Ω―Ä–Ψ–≤–Ψ–¥―è―²―¹―è –Ω―Ä–Η ―²–Ψ–Φ ―É―¹–Μ–Ψ–≤–Η–Η, ―΅―²–Ψ ―³–Ψ–Ϋ–Ψ–≤―΄–Ι ―É―Ä–Ψ–≤–Β–Ϋ―¨ ―à―É–Φ–Α –≤ ―²–Β―¹―²–Ψ–≤–Ψ–Φ –Ω–Ψ–Φ–Β―â–Β–Ϋ–Η–Η –Ϋ–Β –Ω―Ä–Β–≤―΄―à–Α–Β―² 22¬†–¥–ë–ê. –ü―΄–Μ–Β―¹–Ψ―¹ –Ζ–Α–Ω―É―¹–Κ–Α–Β―²―¹―è –≤ ―Ä–Β–Ε–Η–Φ–Β –Μ–Ψ–Κ–Α–Μ―¨–Ϋ–Ψ–Ι ―É–±–Ψ―Ä–Κ–Η (–Β―¹–Μ–Η ―²–Α–Κ–Ψ–Ι –Ω―Ä–Η―¹―É―²―¹―²–≤―É–Β―²; –Β―¹–Μ–Η –Ϋ–Β―² βÄî ―²–Ψ –≤ –Ψ–±―΄―΅–Ϋ–Ψ–Φ ―Ä–Β–Ε–Η–Φ–Β) –≤ –Φ–Β―¹―²–Β –Ω–Ψ–¥ –Φ–Η–Κ―Ä–Ψ―³–Ψ–Ϋ–Ψ–Φ. –‰–Ζ–Φ–Β―Ä–Β–Ϋ–Η―è –Ω―Ä–Ψ–≤–Ψ–¥―è―²―¹―è –≤ –Ω–Β―Ä–≤―΄–Β –Ϋ–Β―¹–Κ–Ψ–Μ―¨–Κ–Ψ ―¹–Β–Κ―É–Ϋ–¥ –Ω–Ψ―¹–Μ–Β –≤―΄―Ö–Ψ–¥–Α –Ω―΄–Μ–Β―¹–Ψ―¹–Α –Ϋ–Α ―Ä–Α–±–Ψ―΅–Η–Ι ―Ä–Β–Ε–Η–Φ, –Η –Ω–Ψ–Κ–Α –Ψ–Ϋ –Β―â–Β –Ϋ–Α―Ö–Ψ–¥–Η―²―¹―è –Ω―Ä–Η–Φ–Β―Ä–Ϋ–Ψ –Ω–Ψ–¥ –Φ–Η–Κ―Ä–Ψ―³–Ψ–Ϋ–Ψ–Φ. –£ –Κ–Α―΅–Β―¹―²–≤–Β ―Ä–Β–Ζ―É–Μ―¨―²–Α―²–Α ―É–Κ–Α–Ζ―΄–≤–Α―é―²―¹―è ―¹―Ä–Β–¥–Ϋ–Η–Ι, –Φ–Η–Ϋ–Η–Φ–Α–Μ―¨–Ϋ―΄–Ι –Η –Φ–Α–Κ―¹–Η–Φ–Α–Μ―¨–Ϋ―΄–Ι ―É―Ä–Ψ–≤–Ϋ–Η –Ζ–≤―É–Κ–Ψ–≤–Ψ–≥–Ψ –¥–Α–≤–Μ–Β–Ϋ–Η―è (–≤ –¥–ë–ê), –Ω–Ψ–Μ―É―΅–Β–Ϋ–Ϋ―΄–Β –≤ ―Ä–Β–Ε–Η–Φ–Β –Η–Ζ–Φ–Β―Ä–Β–Ϋ–Η–Ι Slow, –Κ–Ψ―²–Ψ―Ä―΄–Ι ―¹–Ψ–Ψ―²–≤–Β―²―¹―²–≤―É–Β―² ―É―¹―Ä–Β–¥–Ϋ–Β–Ϋ–Η―é ―¹ –≤―Ä–Β–Φ–Β–Ϋ–Ϋ–Ψ́–Ι –Κ–Ψ–Ϋ―¹―²–Α–Ϋ―²–Ψ–Ι ―Ä–Α–≤–Ϋ–Ψ–Ι 1¬†―¹.
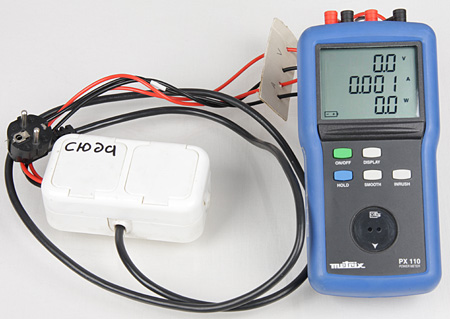
–î–Μ―è –Ψ―Ü–Β–Ϋ–Κ–Η –Ω–Ψ―²―Ä–Β–±–Μ―è–Β–Φ–Ψ–Ι –Φ–Ψ―â–Ϋ–Ψ―¹―²–Η –Ζ–Α―Ä―è–¥–Ϋ–Α―è –±–Α–Ζ–Α (–Η–Μ–Η –±–Μ–Ψ–Κ –Ω–Η―²–Α–Ϋ–Η―è –≤ ―¹–Μ―É―΅–Α–Β –Ψ―²―¹―É―²―¹―²–≤–Η―è –±–Α–Ζ―΄) –Ω–Ψ–¥–Κ–Μ―é―΅–Α–Β―²―¹―è –Κ ―ç–Μ–Β–Κ―²―Ä–Ψ―¹–Β―²–Η ―΅–Β―Ä–Β–Ζ –≤–Α―²―²–Φ–Β―²―Ä Metrix PX110.
–‰–Ζ–Φ–Β―Ä–Β–Ϋ–Η―è –Ω―Ä–Ψ–≤–Ψ–¥―è―²―¹―è –≤ –Ϋ–Α―΅–Α–Μ–Β –Ζ–Α―Ä―è–¥–Κ–Η –Α–Κ–Κ―É–Φ―É–Μ―è―²–Ψ―Ä–Α –Ω―΄–Μ–Β―¹–Ψ―¹–Α, –≤ –Κ–Ψ–Ϋ―Ü–Β ―Ü–Η–Κ–Μ–Α –Ζ–Α―Ä―è–¥–Κ–Η –Η ―²–Ψ–≥–¥–Α, –Κ–Ψ–≥–¥–Α –Ω―΄–Μ–Β―¹–Ψ―¹–Α –Ϋ–Β―² –Ϋ–Α –±–Α–Ζ–Β (–Η–Μ–Η –Ψ–Ϋ –Ψ―²–Κ–Μ―é―΅–Β–Ϋ –Ψ―² –±–Μ–Ψ–Κ–Α –Ω–Η―²–Α–Ϋ–Η―è).
–£ –≤―΄–≤–Ψ–¥–Α―Ö –Ω–Ψ–¥–≤–Ψ–¥–Η―²―¹―è –Ψ–±―â–Η–Ι –Η―²–Ψ–≥, –≥–¥–Β –Κ―Ä–Α―²–Κ–Ψ –Ψ–±―¹―É–Ε–¥–Α―é―²―¹―è –Ψ―¹–Ϋ–Ψ–≤–Ϋ―΄–Β –Ψ―¹–Ψ–±–Β–Ϋ–Ϋ–Ψ―¹―²–Η, –Α ―²–Α–Κ–Ε–Β –Ω–Β―Ä–Β―΅–Η―¹–Μ―è―é―²―¹―è –Ψ―¹–Ϋ–Ψ–≤–Ϋ―΄–Β –¥–Ψ―¹―²–Ψ–Η–Ϋ―¹―²–≤–Α –Η –Ϋ–Β–¥–Ψ―¹―²–Α―²–Κ–Η –Ω―Ä–Ψ―²–Β―¹―²–Η―Ä–Ψ–≤–Α–Ϋ–Ϋ–Ψ–≥–Ψ ―É―¹―²―Ä–Ψ–Ι―¹―²–≤–Α. –û―²–Φ–Β―²–Η–Φ, ―΅―²–Ψ ―¹–Ψ―¹―²–Α–≤–Μ–Β–Ϋ–Η–Β ―ç―²–Η―Ö ―¹–Ω–Η―¹–Κ–Ψ–≤ ―è–≤–Μ―è–Β―²―¹―è –Ω–Ψ –±–Ψ–Μ―¨―à–Β–Ι ―΅–Α―¹―²–Η ―¹―É–≥―É–±–Ψ ―¹―É–±―ä–Β–Κ―²–Η–≤–Ϋ―΄–Φ –Ζ–Α–Ϋ―è―²–Η–Β–Φ, –Ω–Ψ―ç―²–Ψ–Φ―É –Φ―΄ –Ω―Ä–Η–Ζ―΄–≤–Α–Β–Φ ―΅–Η―²–Α―²–Β–Μ–Β–Ι –Ζ–Α–Ϋ–Η–Φ–Α―²―¨―¹―è ―ç―²–Η–Φ ―¹–Α–Φ–Ψ―¹―²–Ψ―è―²–Β–Μ―¨–Ϋ–Ψ, –Η―¹–Ω–Ψ–Μ―¨–Ζ―É―è –≤–Β―¹―¨ –Φ–Α―²–Β―Ä–Η–Α–Μ ―¹―²–Α―²―¨–Η –Η –¥―Ä―É–≥–Η–Β –¥–Ψ―¹―²―É–Ω–Ϋ―΄–Β –Η―¹―²–Ψ―΅–Ϋ–Η–Κ–Η –Η–Ϋ―³–Ψ―Ä–Φ–Α―Ü–Η–Η. –£–Β–¥―¨ –≤―¹–Β –Φ―΄ –Ψ―΅–Β–Ϋ―¨ ―Ä–Α–Ζ–Ϋ―΄–Β, –Η ―É –Κ–Α–Ε–¥–Ψ–≥–Ψ ―¹–≤–Ψ–Η ―¹–Ψ–±―¹―²–≤–Β–Ϋ–Ϋ―΄–Β –Ω―Ä–Η–Ψ―Ä–Η―²–Β―²―΄.