

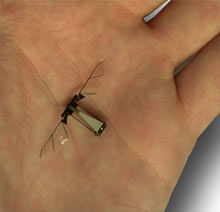
Робот – копия мухи в натуральную величину отправился в свой первый полет в Гарвардском университете. При весе 60 мг и размахе крыльев три сантиметра, крошечный механизм использует для полета движения, позаимствованные у живого прототипа. Хотя исследователями еще предстоит проделать много работы, они уверены, что однажды такие летающие роботы смогут выполнять разведывательные функции или служить для обнаружения вредных химических веществ.
Финансирование разработки выполнило Управление перспективного планирования оборонных научно-исследовательских работ - центральная научно-исследовательская организация министерства обороны США (Defense Advanced Research Projects Agency, DARPA), известная, как создатель сети ARPAnet, ставшей прообразом Интернета. Военных привлекают крошечные размеры устройства и его сходство с живым насекомым – весьма ценные качества для робота-разведчика.
Одной из сложных задач, стоявших перед учеными, была задача воспроизведения движений, обеспечивающих полет. В первую очередь, мешали ограничения существующих производственных процессов, не позволяющие создать прочные и легкие детали механизма. Ученые пришли к выводу, что простым масштабированием задачу не решить: моторы, подшипники и шарниры, обычно используемые в роботах большого размера, не годятся для конструкции размером с муху.
Часть деталей могла бы быть выполнена с помощью технологии MEMS (микроэлектромеханические системы). Но такой подход требовал больших затрат времени и денег. Исследователи нуждались в более дешевом и быстром техпроцессе.
И такой процесс был ими создан. Используя лазерную микрообработку, ученые нарезали тонкие листы углеродного волокна в двухмерные структуры с точностью до нескольких микрометров. Таким же способом нарезали листы полимера. Аккуратно компонуя листы углеродного волокна и полимера, ученые смогли сформировать необходимые детали.
Например, чтобы создать подвижное сочленение, на два крошечных кусочка углеродного волокна, расположенных на небольшом расстоянии друг от друга, укладывали полоску из полимера. Затем, на ней размещалось еще два кусочка углеродного волокна. После этого детали скреплялись друг с другом, образуя некоторое подобие буквы Н, в которой перемычка была выполнена из гибкого полимера, а ножки – из прочного углеволокна.
Компонуя полученные детали, разработчики смогли создать довольно сложные блоки, которые оказались способны выполнять необходимые движении в точности, как было задумано. Чтобы привести механизм в действие, были использованы электроактивные полимеры, которые изменяют свою форму под действием электрических импульсов.
На создание робота понадобилось более семи лет. В течение этого времени была изучена динамика полета, найдены подходящие материалы и технологии, опробованы различные технические решения.
Пока что робот летает на поводке, который задает направление его движения. По нему также поступает питание. Следующим этапом должно стать создание микроскопического контроллера, способного управлять движением «робомухи» и перенос источника питания на ее борт (по оценке исследователей, современные литиево-ионные технологии способны обеспечить роботу до пяти минут автономного полета). По сути дела, подняв робота-муху в воздух, ученые сделали только первый шаг. Им еще предстоит разработка сенсоров, создание ПО, позволяющего обнаруживать и огибать препятствия, и решение других задач.
Источник: Technology Review